








基于ABB机器人的虚拟示教与编程
摘要:本文旨了解并简单研究一下关于ABB机器人在虚拟示教编程这一方面的内容。由于近年来工业机器人使用愈来愈广泛与受欢迎,那么寻求更加高效与可操作性的编程技术成为了发展工业机器人的重中之重,所以本文打算基于Robot studio这一软件,就ABB工业机器人的虚拟示教编程技术为例,详细论述其示教与编程。
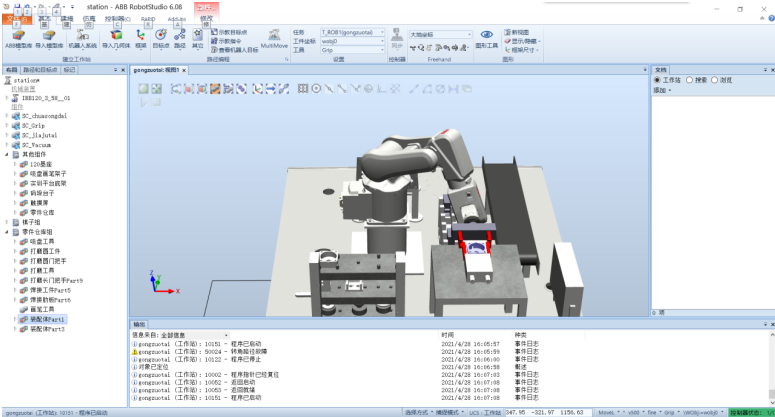
Robot studio 6.08 这款软件会被用来辅助展示基于ABB机器人的虚拟示教和编程。其中包括讲解关于示教器的各项重要菜单以及功能键,说明虚拟示教器中手动模式下的三种至关重要的动作模式和应用特点,(这里说明下本篇文章将详细讲述的是虚拟示教器中手动模式下的各种操作)然后详细说明手动模式下使用程序编辑器对任务的编程指令。附带解决示教中常见的问题。通过夹爪机器人的工作站,在站内的离线编程和虚拟示教来实现该夹爪机器人的仿真示教。
关键词:ABB机器人;虚拟示教编程;仿真;Robot studio
Virtual teaching and programming based on ABB Robot
The purpose of this article is to understand and briefly study the aspects of virtual teaching and programming of ABB robots. As the use of industrial robots has become more and more popular in recent years, the search for more efficient and maneuverable programming technology has become the top priority of the development of industrial robots. Therefore, this article intends to be based on the Robot studio software, which is ABB industrial robots. Take the virtual teaching and programming technology as an example, and discuss its teaching and programming in detail.
Robot studio 6.08 This software be used to assist in the demonstration of virtual teaching and programming based on ABB robots. Including explaining the important menus and function keys of the teach pendant, explaining the three vital action modes and application features in the manual mode of the virtual teach pendant, (here, the next article will describe in detail Various operations in the manual mode in the virtual teach pendant) and then explain in detail the programming instructions of the task using the program editor in the manual mode. Attached to solve common problems in teaching. Through the workstation of the gripper robot, offline programming and virtual teaching in the station can realize the simulation teaching of the gripper robot.
Abstract: This paper is based on the national occupational college skills competition “A200 automatic robot platform”.
Keywords: handling robot; finite element; RFID identification; optical navigation
目录
第一章 引言 1
1.1课题来源及研究意义 1
第二章 ABB机器人的发展及研究内容 3
2.1国外ABB机器人起源与发展 3
2.2 国内ABB机器人技术发展与现状 4
2.3本课题的主要研究内容 5
第三章 基于Robot studio的ABB机器人 7
3.1Robot studio概述 7
3.1.1虚拟示教器, 8
3.1.2程序编辑器 20
第四章 实现ABB机器人基本的离线编程与模拟示教 24
4.1 创建工作站中的组件构成 24
4.2 机器人的路径指令编程 25
4.3 区域数据问题及夹爪状态的编程 27
4.4 实现夹爪机器人搬运码垛的仿真示教 29
结论 32
致谢 33
参考文献 34
第一章 引言
1.1课题来源及研究意义
生产力的不断进步推动了科技的进步与革新,使各单位间建立起了更加合理的生产关系。自1840年蒸汽工业革命以来,人力劳动开始逐渐地被机械或机器取而代之,而这种变革也为人类社会创造出巨大的财富,也同样极大地推动了人类社会的进步,加快了人类文明的缔造。纵观当下,机电一体化、机械智能化和自动化类的技术应运而生。人类抓住机遇充分发挥主观能动性,充分增强对机械装置的利用效率,使之为我们创造出更加巨大的生产力,并在一定程度上维护了社会的和谐。自此,工业机器人的出现是人类在利用机械进行社会生产史上的一个里程碑。而ABB机器人作为全球应用与研究最广泛最普及的工业机器人工种之一,在国内的发展尤为迅猛。近些年来,工业机器人关于编程技术正向着虚拟示教编程技术这一方面发展
基于所学专业的相通与相似性,再加上课程内容的编排以及课堂上老师言传身教的影响,是我萌发了对工业机器人的强烈好奇心与求知欲。这些,都无疑埋下了我选择ABB机器人虚拟示教与编程这一课题的种子,而这几年的课程学习恰是这颗种子在本校这一肥沃土壤里积蓄力量生根发芽的关键。曾在大二的某门课程上,我便记忆犹新于操作Robot studio这一软件来完成简单的工件任务,初学时困难重重且迷惑惘然,然而柳暗花明又一村,经过老师的教导与同学的帮助完成了任务的编程,回味过来才发现极有意思又极具成就感。因为这看似简单的任务却是凝聚了一个初学者的思考与探索。又是一次实训课程的任务,老师布置了一个我们十分陌生的任务,就是用Robot studio软件完成工件的运转,这也是我们第一次接触到ABB机器人的机械臂与它的运作,在软件里对机械臂进行虚拟示教编程然后让他运转,这就是大概的基于Robot studio进行的ABB机器人的虚拟示教与编程吧。
综合以上的经历与感触,最终我选择了让我熟悉又陌生的这一课题。熟悉是熟悉在这两年来课上零零总总的所学有着一部分与其密切相关联,陌生又在于这是一个自由性很高的颇具挑战性的任务。
再来谈谈关于ABB机器人虚拟示教编程课题研究的意义。虚拟示教与编程实际上,它使用计算机三维几何来构建虚拟环境和虚拟机器人。在虚拟模型中引入机构和场景的机器人,对机器人的行为和网站的交互进行限制,使其更自然、更逼真;同时操作员可以使用操纵杆和其他设备来控制机器人,移动到位,可以选择不同的视点从不同的侧面观察机器人的运动,使操作者可以看到具体详细的虚拟环境;利用相应的人机界面控制机器人在虚拟世界的虚拟场景中的终端效果;根据机器人的轨迹生成机器人语言,并进行相应的仿真和优化虚拟示教方案。
综上,其实机器人的示教与编程是密不可分的,两者皆是构成不仅仅只是ABB类型机器人工作的关键因素。当然,随着机器人应用范围的扩大,机器人编程技术也越来越受到人们的重视委员会虚拟现实技术的发展为人们提供了一种更真实、更自然的人机交互方式电脑。提供了一个强大的工具机器人模拟,开发和应用;给工业生产与制造带来了新的活力。也正因此,机器人示教编程逐渐成为新一代机器人编程技术的主要发展方向之一。
因此,本文会通过基于现实操作的虚拟示教以及离线编程方式让读者更深刻的感受到ABB机器人的工作方式的简便与高效,以及现代智能化机器人能够被看好取代人工方式的优势与独有魅力。
第二章 ABB机器人的发展及研究内容
2.1国外ABB机器人起源与发展
在21世纪,机器人已成为现代工业不可缺少的工具,是工业现代化最重要的标志之一。在机器人技术发展的几十年中,机器人在技术上的应用种类繁多,但这些形态或是构成都迥然不同的机械臂都被相应的投入工程应用并带来了巨大的经济效益和社会效益。
谈及ABB机器人,我想先讲明关于机器人大类的发展史,ABB机器人作为机器人中的一大类别,因其较高的工作效率,便于集成,安装十分灵活以及出色的可靠性等优点深受世界各地区尤其是工业发展需求较大的国家欢迎。也因此,ABB机器人得以成为自动化和智能化工业生产的主要机器人类型。
1950年著名计算机学家艾伦.图灵在他的《计算机器和智能》一书中提出“机器能思考吗”这一问题,他也提出对机器智能的测试方法,也就是著名的“图灵测试”。因其工作和之后召开的达特茅斯研讨会,为人工智能领域创造了一个必要的基本框架。后来,4年后,诞生了第一个工业机器人“Unimate”,其特点是有一个机械臂,能够运输压铸件并将其焊接到位。殊不知这种革命性的装置将改变世界制造业的面貌。
1961年,Unimate开始,加入通用汽车公司的工厂流水线,在装配线上与其他机器装置合作,按照存储的循序渐进的命令,可以执行并完成各种任务。工业机器人的出现,彻底改变了制造业。后来,机器人不断发展并改进,再辅以最先进的技术,经历多个发展历程,最终发展为如今的几大工种机器人。
ABB机器人作为工业机器人中的佼佼者,他拥有全球领先的自动化技术。ABB机器人公司的前身是ASEA公司和BBC公司,这两者都曾是全球著名的电力和自动化技术设备大型生产企业,凭着自身强大的技术底蕴使得ABB机器人公司以较大的市场份额占据着榜首的位置。其累计销量已超过 20万台,产品规格全、产量大,是世界上著名的工业机器人制造商和我国工业机器人的主要供应商。
ABB的机器人核心在于运动控制,而工业机器人的难点恰恰就在于运动控制系统,因此ABB公司在1998年,研制出了Robot Studio离线编程和仿真软件,这也正是本文用来研究ABB机器人虚拟示教编程的核心辅助。
目前,ABB机器人广泛应用于工业制造的各个领域,类型的不同通常是机器人承载能力或重量的差别工作距离的远近差别以及工种的差别,正因为这些工种多样的工业机器人的开发与应用,迎合了制造生产的需要,常见的就有喷涂机器人,码垛机器人和焊接机器人等等。
2.2 国内ABB机器人技术发展与现状
ABB与中国的关系始于20世纪初,1907年ABB向中国交付了第一台蒸汽锅炉。自从至此,ABB与中国的贸易关系得到了发展。ABB公司在1974年于香港设立了中国业务部门,1979年,ABB在北京设立了常设办事处。1994年总部设在北京。
2005年,ABB在中国上海建立了世界领先的机器人生产基地,并于同年成立了全球机器人研究中心,ABB集团成为中国唯一一家从事工业机器人生产的国际公司。
2006年,ABB集团在中国上海设立了机器人总部,这是五大业务部门之一。
2007年,ABB集团通过引进最新的机器人生产线,扩大了在中国的机器人制造活动。
2008年,ABB亚太机器人柔性精加工技术中心落户上海,标志着abb亚太机器人柔性精加工技术中心的实施迈出了重要一步ABB柔性更贴近客户,更安心开拓亚洲市场。
2009年,ABB机器人投资1.5亿美元,总部设在上海康桥工业园区。
ABB机器人公司在中国萌生了最大规模生产大型工业机器人、电弧焊、涂装等小型机器人的兴趣,以及机器人控制器。销往世界各地。世界工业机械臂的产量需求随着中国工业的快速发展和对工业机器人需求的不断增长,ABB将继续为机器人技术开发新的解决方案,以满足本地市场和亚太市场的需求,满足客户的特定需求并提高生产力。
ABB机器人集团在中国开展全方位的商务活动,完全包容生产、研发、分销,工程和服务市场份额。基于“立足本土,服务世界”的经营理念,ABB将中国的研发以及产品和系统设备销往世界各地。例如,欧洲的沃尔沃汽车公司在欧洲提供机器人产品和设备,美国的机器人产品和与之配套的系统设备为印度提供先进的电弧焊技术等等,中国ABB全球采购计划服务为全球各地ABB机器人公司服务。此时,中国已成为世界上最大的市场。
ABB机器人公司在诸多领域的影响力也同样位于工业机器人四大家族之首。
ABB致力于研究并提供解决方案,在帮助客户提高生产效率、改善产品质量、提升安全水平这一方面也做到卓越体现。在工业机器人行业,ABB可谓是当之无愧的领先者。
2.3本课题的主要研究内容
本文主要借助Robot studio这款软件详细说明一下ABB机器人的虚拟示教与编程,集中于基本的虚拟示教器应用以及简单的编程示范操作。包括创建一个新的空工作站,导入一个示例ABB机器人,介绍虚拟示教器面板上的快捷键和功能按钮,其左上角的菜单以及菜单下的主要子菜单。当然,这款RS软件的示教器下的菜单有14个子菜单,在这些基础上最后进行一个ABB喷涂机器人对工件的模拟喷涂,从而实现ABB机器人的离线编程与仿真示教。一些不太重要的冷门的菜单就不做多余说明,本文将主要介绍手动操作和程序编辑器,这两个也是最重要的两个应用菜单,其余的也将顺带着提一下,差不多了解其他的各项菜单的基本作用即可。换句话说,其余的菜单功能不是不要掌握,而是根据应用这款软件的需要和深度范围作自定义了解。我们对它们的掌握情况只需对机器人基本的虚拟示教编程的仿真操作与运转没有障碍即可。
这里讲一下,ABB机器人编程分为示教编程和离线编程,我们主要讲述的是它的离线编程。简单说一下第一种示教编程,手动示教编程是操作人员通过示教器,手动控制机器人的关节运动,就是一种现场编程。其中过程繁琐、效率低,示教过程容易发生事故加上太依赖于工作人员的工作水平与经验的弊端使其逐步被生产所淘汰。也因其弊端的显而易见,所以离线编程的出现可以说是必然的且是因运而生。
而离线编程是当前较为流行的一种编程方式,离线编程克服了手动示教编程的诸多缺点,它减少了机器人的停机时间,当对下一个任务进行编程时,机器人仍可在生产线上进行工作,适用范围广,可对各种机器人进行编程,并能方便的实现优化编程,可对复杂任务进行编程,充分利用了计算机的功能,减少了编写机器人程序的时间,减少了手动示教的不便。
本文将借助“Robot studio”这款软件实现ABB机器人的基本的离线编程与仿真示教。主要利用创建的机器人工作站实现夹爪机器人的码垛任务,即控制编程机器人使其夹取工件到指定位置并放下归为原位的过程,旨在完成这一任务来加以阐释基于ABB机器人的虚拟示教与编程。
参考文献
[1]张爱云,张秋菊.机器人虚拟示教编程系统[J].无锡:江南大学,2008.
[2]张爱云,张秋菊.机器人虚拟示教编程系统的设计及研究[J].无锡:江南大学,2003.
[3]李成伟,工业机器人的现状及发展趋势[D].机电工程,2014,(12):12-14.
[4]王骏,我国工业机器人制造业零部件采购管理研究.复旦大学,2012
[5]陈焕明,熊镇宇,刘频. 基于ROTSY的弧焊机器人离线编程系统.2008
[5]张孝祖,工业机器人的现状及发展趋势.2004
[6]杜志俊 工业机器人的应用及发展趋势.2002
[7]ABB机器人发展历史—高工机器人新闻
[8]ABB机器人



