








基于LabVIEW设计人机交互界面船舶航向自适应反步控制系统设计与实现(PID)
摘 要
本文考虑船舶航向控制系统模型中的非线性、不确定性以及外界海洋环境干扰因素,基于船舶二阶非线性操舵响应模型,提出了航向自适应反步控制方法。该方法采用自适应策略对不确定水动力系数和未知环境变化形成的有界干扰进行补偿,并基于反步法给出了舵角指令和自适应律,然后基于Lyapunov理论证明了所设计控制系统的稳定性,并借助仿真平台验证所设计控制器的有效性,最后通过缩比模型试验,与常规PID控制进行对比分析,验证所设计控制器性能,结果表明,在不同初始条件、航速和随机干扰等情况下,所设计的自适应反步控制器具有较好的自适应性和较强的鲁棒性。
本文船舶航向控制系统设计,突破了常规船舶航向控制器设计对海况及浪向自适应差的局限性,且通过数值仿真和试验得到了有效性验证,研究成果更具有实际应用价值,为工程应用提供了重要技术支撑,亦可为智能船舶航迹控制提供理论借鉴。
关键词:船舶航向控制;反步;自适应律;鲁棒
Abstract: Aiming at the problem of uncertainty in the ship course nonlinear system, second-order nonlinear steering response model is established, and an adaptive backstepping control method is proposed for the course control problem. The rudder angle command and the adaptive law are proposed based on the backstepping method, and an adaptive strategy is used to compensate the compound bounded disturbances produced by the uncertain hydrodynamic coefficients as well as the changing external environment. Furthermore, the stability of the controller is proved by Lyapunov stability theory. Finally, through a scaled model test, a comparison with the traditional PID control is carried out to analyze the performance of different control methods by experiments. Results show that the designed controller has good adaptive ability and strong robustness for the ship course control.
In this paper, the designed ship heading control system can breakthrough the limitation of using only simulation analysis. The research results have more practical application value and can provide references for the tracking control of intelligent ships.
Key words: Ship course control; backstepping; adaptive law; robust
目 录
第一章 绪论 1
1.1 研究意义 1
1.2 国内外研究现状 1
1.3 本文研究内容 3
第二章 船舶运动数学模型 4
2.1坐标系和六自由度运动方程 4
2.2船舶水平面运动数学模型 5
2.3 船舶运动操舵响应模型 6
2.4 本章小结 7
第三章 船舶航向控制器设计 8
3.1船舶航向控制原理及控制性能指标 8
3.2 PID控制器设计及仿真验证 8
3.3自适应反步控制器设计及仿真验证 12
3.3.1自适应反步控制器设计 12
3.3.2仿真验证 14
3.4 本章小结 15
第四章 船舶航向控制系统实现及实验 16
4.1控制系统的总体结构 16
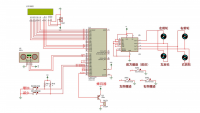
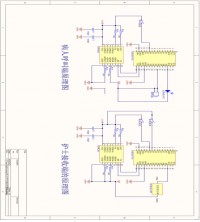
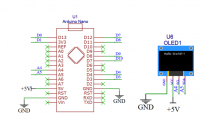
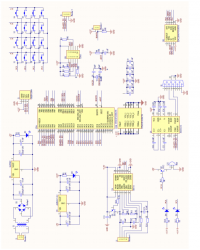
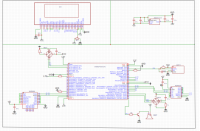
4.2系统的硬件设计 16
4.2.1硬件设计总体方案 16
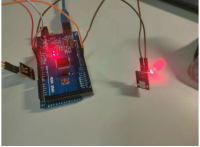
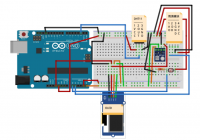
4.2.2 通信连接 17
4.3系统的软件设计 18
4.3.1软件设计总体流程图 18
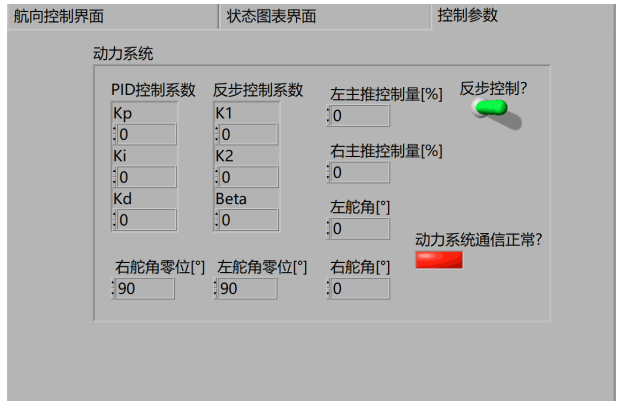
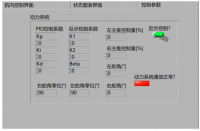
4.3.2 上位机软件设计 19
4.3.3 下位机软件设计 20
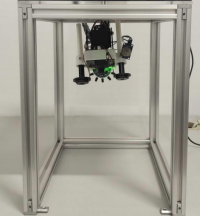
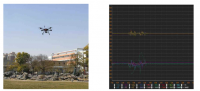
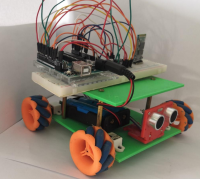
4.4 实物平台 21
4.5 本章小结 24
第五章 结 论 25
5.1 本文的主要研究内容 25
5.2本文的创新性、先进性 25
5.3 进一步研究的问题 26
参考文献 27
附录1 仿真主程序 29
附录2 下位机软件程序 32
参考文献
[1] 张显库,贾欣乐,船舶运动控制[M].北京:国防工业出版社,2006.
[2] 韩鹏,刘志林,周泽才,唐昊,班良,郝留磊.基于LOS法的自航模航迹跟踪控制算法实现[J].应用科技, 2018,45(03):66-70.
[3] 赵志平,张强.船舶航向的自适应自调节PID跟踪控制[J].中国舰船研究,2019,14(03):145-151.
[4] 刘勇,卜仁祥,徐海军,白军.船舶航向积分补偿PID控制及参数自适应算法[J].大连海事大学学报,2016,42(03):20-24+30.
[5] 张雪飞,袁鹏,谭俊哲, 等. 基于模糊PID的无人帆船航向控制方法[J].中国舰船研究,2019,14(6):15-21.
[6] 刘洋, 米伟, 郭晨. 船舶航向模糊自整定操舵控制器的研究[J]. 中国航海, 2010, 33(1):11-15.
[7] P. H. Yang, S. S. Hu, J. Y. Juang. Design of a nonlinear H. controller applied to a ship control system[C]. Proceedings of the 2000 IEEE Intemational Conference on Control Applications, Anchorage, USA, 2000, 1:349-354.
[8] 贾欣乐, 张显库. 船舶运动智能控制与鲁棒控制[M]. 大连: 大连海事大学出版社, 2002.
[9] 张显库,韩旭. 船舶运输安全保障下的智能船舶运动控制策略[J]. 中国舰船研究,2019,14(S1):16.
[10] Zhang Q, Hu Y, Wang A, Jiang N. Nonlinear adaptive control algorithm based on dynamic surface control and neural networks for ship course-keeping controller[J]. Journal of applied science and engineering,2017,20(2):157-64.
[11] Zhang XK, Zhang GQ. Design of ship course-keeping autopilot using a sine function-based nonlinear feedback technique[J]. Journal of Navigation, 2016;69(2):246-56.
[12] Du J, Hu X, Sun Y. Adaptive robust nonlinear control design for course tracking of ships subject to external disturbances and input saturation. IEEE Transactions on Systems, Man and Cybernetics 2020;50(1):193-202.
[13] Fossen,T.I., Grovlen,A.. Nonlinear output feedback control of dynamically positioned ships using vectorial observer backstepping [J]. IEEE Transactions on Control Systems Technology, 1998, 6(1):121-128 Fosson
[14] Nam-Kyun Im,Van-Luong Tran,Thanh-Dat Le. Experiment on track-keeping performance using free running model ship[J]. 9th IFAC Conference on Control Applications in Marine Systems The International Federation of Automatic Control September, Osaka, Japan,2013:17-20.
[15]Ikuo Yamamoto, Masami Matsuura.et al. Dynamic positioning system of offshore platform by advanced control[J]. International Conference on OFFSHOPE MECHANICS AND ARCTIC ENGINEERING janelro,Brazil,2001:3-8.
[16]Abkowitz M. A., Lectures on ship hydrodynamics-steering and maneuverability[R], Hydro- and Aerodynamics Laboratory, Report No. Hy-5, Lyngby, Denmark, 1964.
[17]Dubbioso G. Maneuverability behavior of twin screw ships. PhD Thesis, 2011.
[18]Bech M. I., Some aspects of the stability of automatic course control of ship[J], Journal of Mechanical Engineering Science, 14(7):123-131, 1972.
[19]贾欣乐,杨盐生.船舶运动数学模型: 机理建模与辨识[M].大连海事大学出版社.1994.4:8-35.



