








基于STM32单片机机器视觉的图像识别运动小车设计与实现
摘要:近些年以来随着私家车的发展和普及,如今我们已经对于车辆智能化程度有了更高水平的要求。由于此次项目中的小车机器人的机器视觉系统具有数据量丰富,智能化程度高等的特点,对周围的交通环境都进行了提取和辨认,所我们得到的实验结果可以直接应用在智能小车的辅助驾驶或者是车辆自动操纵中,该小车只需要按照一个给定的路线,就可以根据路线自动运转,同时还能够准确地识别出在运转过程中会出现的汽车车牌号,图形信息以及汽车方向指示标记。本文设计的小汽车就是一种基于图像传感器的智慧型小汽车识别系统。根据Open MV图像传感器采集得到的数字化图像信息,先进行数据采集与传输,接着再进行运动分析识别与输出控制,使小汽车可以根据线路规划进行运作并且对汽车牌号进行图像识别与显示。
关键词:车牌识别;机器视觉;自动驾驶;图像识别
Image recognition of moving car based on machine vision
Abstract: With the improvement and popularization of private transports in last several years, we now have a higher level of requirements for vehicle intelligence. Since the machine vision system of the car robot in this project has the characteristics of rich data volume and high degree of intelligence, the surrounding traffic environment has been extracted and identified, and the experimental results we obtained can be directly applied to the assistance of the smart car During driving or automatic vehicle manipulation, the car only needs to follow a given route to automatically operate according to the route, and it can also accurately identify the car license plate number, graphic information and car direction indication that will appear during operation. mark. The car designed in this article is a smart car identification system based on image sensors. According to the image information collected by the Open MV camera, the data is collected and transmitted first, and then the motion analysis recognition and output control are perfect, so that the car can operate according to the route plan and perform image recognition and display of the car brand.
Keywords: License Plate Recognition; machine vision; autonomous driving; image recognition
目录
第一章 绪论 5
1.1图像识别运动小车的研究背景及意义 5
1.2机器视觉的图像识别运动小车课题研究的内容 5
第二章 智能小车系统整体方案设计 6
2.1智能系统设计的思路 6
2.2 STM32主控芯片 6
2.3 系统总体框图 6
2.3.1电机驱动模块 7
2.3.2 Open MV摄像头采集模块 9
2.3.3 舵机控制模块 9
2.3.4路径识别模块 9
第三章 系统的硬件设计 9
3.1 STM32单片机主控板 10
3.2 Open MV图像采集模块 12
3.2.1 基于Open MV图形识别 13
3.2.2 基于Open MV的车牌识别 15
3.3 舵机控制模块 17
3.4 路径识别循迹模块 18
3.5 电机驱动模块 19
3.6 电源模块 20
第四章 系统的软件设计 21
4.1智能小车总体设计流程 21
4.2 PWM 脉冲控制 22
4.3 循迹模块流程图 23
4.4 图像识别模块 24
4.5 LCD1602显示模块 25
第五章 系统的调测 26
5.1 软件调试器 26
5.2 串口调试软件 28
小结与致谢 28
参考文献 30
附录 31
参考文献
[1]吴琼,时利,谢欣燕,岳丽姣.基于视觉标记板的自动驾驶车辆激光雷达与相机在线标定研究[J/OL].汽车技术:1-5[2020-04-03]. https://doi..bysj1.com/10.19620/j.cnki.1000-3703.20181210.
[2]吴琼,时利,谢欣燕,岳丽姣.基于视觉标记板的自动驾驶车辆激光雷达与相机在线标定研究[J/OL].汽车技术:1-5[2020-04-03]. https://doi..bysj1.com/10.19620/j.cnki.1000-3703.20181210
[3]黄健,刘昊,一种快速车牌图像定位方法[J] ,山西电子技术, 2007(6):45-47.
[4]朱明珠, 赵云, 沈英. 车载机器视觉的应用概述[J]. 机电技术, 2014(1):50-52.
[5]潘中杰.车牌自动识别技术的研究与实现,广东:中山大学,2007.
[6]纪明君,陈新,李彪.基于机器视觉的自动驾驶原理及应用[J].北京汽车,2019(05):18-20.
[7]笪陈宇,唐明,雷鑑铭.基于自动驾驶的机器视觉原理及应用[J].无线互联科技,2018,15(10):124-125.
[8]岑毅.基于Arduino 控制器和安卓Open MV的视觉目标追踪双足机器人的设计研究[J].河南科技,2018(10):17
[9] 周新绝.关绮玲编著.机器人.上海:复旦大学出版社.1994:7~9
[10] Fred G. Martin. 机器人探索-工程实践指南.北京:电子工业出版社,2004.8
[11] 王宇熙,夏其表.Visual C++6.0程序设计实用教程.2006,7
[12]王祚斌.国内外机器人发展概况.电气自动化.1995(2):64~65
[13]刘君华.智能传感器系统[M]西安:西安电子科技大学出版社,1999.
[14李华.图像处理技术[M].北京:北京航空航天大学出版社,2004.
[15] Alan Bradshaw.The UK Security and Fire Fighting Advanced Robot Project.IEEE Int.Conf.on Robotics and Automation.1991:1~4
第一章 绪论
1.1图像识别运动小车的研究背景及意义
在这个世界上,视觉器官眼睛,是我们对世界进行认知的,特别重要的器官。要是现在能够人为地通过智能制造的物理物体也能有眼睛,则当今这个世界已经向着成熟的智能技术,迈进了巨大的一步。国外的著名教授和相关科研人员给出过了一篇关于机器视觉如何制造汽车的文章,文章中叙述到汽车可以从真实环境中获取原始情况并在开车时始终像有人驾驶一样控制车辆的行进方向。伴随着人们对智能服务行业的需求,现在实现全自动车辆识别与自动操控已成为我们的工作要解决的问题。
此次的设计意义在于辅助车辆进行智能操控,实现车辆的自动循迹。如今随着私家车的发展和普及,我们已经对于车辆智能化程度有了新的要求。由于该小车机器人的视觉系统具有数据量丰富,智能化程度高等的特点,对周围的交通环境都进行了提取和辨认,所得到的结果可以直接应用在智能小车的辅助驾驶或者是自动操纵中,该小车只需要按照一个给定路线运转,同时还能够准确地识别出在运转过程中会出现的汽车牌号,图形以及汽车方向指示标记。本文设计的小汽车就是一种基于图像传感器的智慧型小汽车识别系统。根据摄像头采集得到的图像信息,进行运动分析识别与输出控制,使小汽车驾驶员可以根据运动和汽车牌号进行图像识别与显示。
1.2机器视觉的图像识别运动小车课题研究的内容
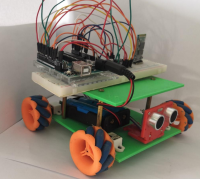
此次项目中我们需要设计制作出一个简易的基于机器视觉的运动小车。该小车能按照给定的路线自动运行,同时在运动过程中又能识别出前方出现的车牌号,图形信息以及方向指示标志。
参考文献
[1]吴琼,时利,谢欣燕,岳丽姣.基于视觉标记板的自动驾驶车辆激光雷达与相机在线标定研究[J/OL].汽车技术:1-5[2020-04-03]. https://doi..bysj1.com/10.19620/j.cnki.1000-3703.20181210.
[2]吴琼,时利,谢欣燕,岳丽姣.基于视觉标记板的自动驾驶车辆激光雷达与相机在线标定研究[J/OL].汽车技术:1-5[2020-04-03]. https://doi..bysj1.com/10.19620/j.cnki.1000-3703.20181210
[3]黄健,刘昊,一种快速车牌图像定位方法[J] ,山西电子技术, 2007(6):45-47.
[4]朱明珠, 赵云, 沈英. 车载机器视觉的应用概述[J]. 机电技术, 2014(1):50-52.
[5]潘中杰.车牌自动识别技术的研究与实现,广东:中山大学,2007.
[6]纪明君,陈新,李彪.基于机器视觉的自动驾驶原理及应用[J].北京汽车,2019(05):18-20.
[7]笪陈宇,唐明,雷鑑铭.基于自动驾驶的机器视觉原理及应用[J].无线互联科技,2018,15(10):124-125.
[8]岑毅.基于Arduino 控制器和安卓Open MV的视觉目标追踪双足机器人的设计研究[J].河南科技,2018(10):17
[9] 周新绝.关绮玲编著.机器人.上海:复旦大学出版社.1994:7~9
[10] Fred G. Martin. 机器人探索-工程实践指南.北京:电子工业出版社,2004.8
[11] 王宇熙,夏其表.Visual C++6.0程序设计实用教程.2006,7
[12]王祚斌.国内外机器人发展概况.电气自动化.1995(2):64~65
[13]刘君华.智能传感器系统[M]西安:西安电子科技大学出版社,1999.
[14李华.图像处理技术[M].北京:北京航空航天大学出版社,2004.
[15] Alan Bradshaw.The UK Security and Fire Fighting Advanced Robot Project.IEEE Int.Conf.on Robotics and Automation.1991:1~4



