








基于STM32单片机四旋翼无人机控制系统设计
摘要
近年来无人机的发展迅速,四旋翼无人机飞行器被广泛运用于多种行业,军用、工业、农业、商业等。主要因为四旋翼无人机结构比较简单,操作起来比较方便,没接触过的群众也容易操纵其完成指定的任务,因此发展为现代社会最热门的行业是无人机发展的必然趋势。无人机的外观结构,能保证其稳定飞行的核心原理、硬件设施的选取和采用、飞行姿态算法的推导实现还有软件系统的实现,,都将在后文中详细讲解。STM32单片机被选用作为飞行器的控制系统主体,利用各式各样传感器的优势来达成系统下达的命令,以确保飞行器的多个传感器数据能够被准确地测量和处理,从而保证飞行姿态的精度。接着采用PID控制方法控制飞行器电机的运转,以实现飞行器多样的飞行姿态和飞行方式。无人机的研究探讨方式范围多种多样,本文就无人机研究与设计展开,为了下述不同板块:首当其冲的是,必须要对无人机在国内外的发展有一个大致了解,按其用途,又分为民用和军用。其二,了然无人机两种不同的结构,对无人机的飞行原理了然于心,且需要对无人机不同的飞行状态进行受力分析。购买前,一定要认真考察,保证所选购商品满足要求。通过反复筛选,确定了适合的姿态检测设备,并针对其特性设置了其原理图,然后将其转换为实物的电路板,从而顺利地构建了硬件平台,并且也成功地装配了飞行器的所有部分,如车架和驱动部分等。对这些飞行器的部分加以拼装,从而实现了对它们的组装。并且通过采用了PID控制算法,无人驾驶飞行器的操控性能也获得了明显提高,并且控制系统的基本原理也得到了简要阐述。而后进行的是对装配好的无人机进行调试,获得地面静态和空中动态的测试数据,不同的飞行模式就都可得到结果。要设计出稳定飞行的四旋翼无人机,必须不断进行程序调试和优化,直至达到最终目标。
关键词:四旋翼无人机;STM32处理器;PID算法;姿态传感器
summary
Mainly because the structure of the quad -rotor drone is relatively simple, it is more convenient to operate, and the people who have not been touched are also easy to manipulate it to complete the designated task, so the drone has developed into one of the popular industries in recent years. This article details the construction design of the unmanned quarrel aircraft, including the flight principle of drones, the introduction of hardware system introduction, the derivation of the flight posture algorithm, and the implementation of the software system. The aircraft uses STM32 single -chip microcomputer as the core of the control system. Corresponding calibration and processing through the characteristics of different types of sensors to ensure that multiple sensor data of the aircraft can be accurately measured and processed, thereby ensuring the accuracy of the flight attitude. Then use the PID control method to control the operation of the aircraft motor to achieve a diverse flight attitude and flight method of the aircraft. The focus of this article is to discuss the research and design of drones, including the following aspects: First, to understand the development of unmanned machines at home and abroad, and its specific application in civilian and military fields. Master the two structures and flight principles of drones, as well as the force analysis diagram in different flight conditions. This is the second important knowledge point. When buying, you must consider it carefully to ensure that the selected items meet the needs. After many screening, determine the appropriate gesture measurement system, design the circuit schematic diagram based on its characteristics, then transform it into a physical circuit board, and successfully build a hardware platform. At the same time Including racks and power parts. Assemble the components of these aircraft to complete their assembly. By using the PID control algorithm, the control effect of the drone has been significantly improved, and the basic principles of the control system are also briefly explained. Successfully completed a variety of flight modes. To design a stable flying rotor drone, program debugging and optimization must be continuously processed until the final goal is achieved.
Keywords: quadcopter drone; STM32 processor; PID algorithm; attitude sensor
目录
第一章 绪论 6
1.1 研究背景及意义 6
1.2 国内外四旋翼飞行器的发展现状 6
1.3 本文研究方法和内容 8
第二章 四旋翼无人机的结构及工作原理 10
2.1 四旋翼无人机的结构 10
2.2 四旋翼无人机的系统结构 10
第三章 四旋翼无人机硬件系统设计 13
3.1 微惯性组合系统传感器组成 13
3.2 姿态测量系统传感器的选型 14
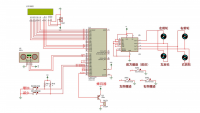
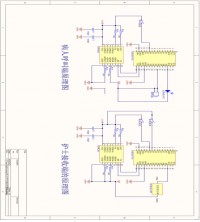
3.3 电源系统设计 15
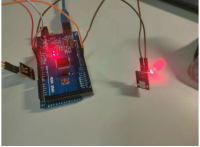
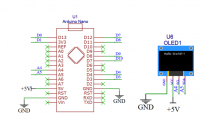
3.4其它硬件模块 16
第四章 四旋翼飞行器姿态系统设计 20
4.1姿态参考系统原理 20
4.2 姿态系统软件设计 21
4.3传感器信号处理 22
4.4坐标系 23
第五章 飞行器试验 25
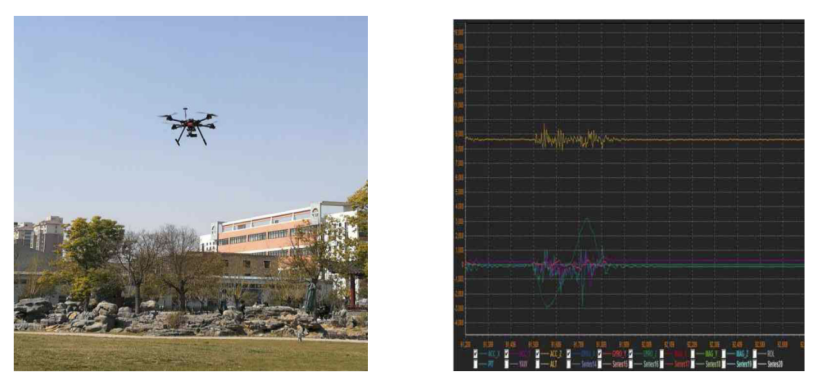
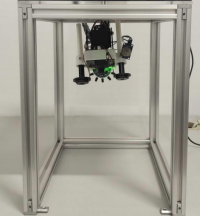
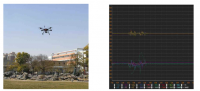
5.1飞行试验准备 25
5.2试飞内容及结果 26
第六章 总结和期望 29
第一章 绪论
1.1 研究背景及意义
在航空航天领域中,四旋翼无人机现如今已是一颗冉冉升起的新星,大多都归功于传感器、单片机、锂电池、无刷电机等先进技术的不断进步,。四旋翼无人机具有价格便宜、机动灵活等优点,已成为国内外各大科研院所的重要研究方向。四旋翼的无人机,让人们的关注点从原来的固定翼变成了现在的多旋翼,主要是固定翼的体积太大,又无法承载更多的重量,这也是为什么会有人抱怨的原因。四个旋翼的存在,让原本对普通人来说很大的飞行器变得很普通。四旋翼飞行器相对于固定翼飞行器,结构简洁明了,操作方便上手,垂直起降不在话下,造价低,性能稳定,机动性强[1.]。在民用领域,无人驾驶飞机能够在许多方面解放人力,譬如:喷洒农药、拍摄、地图绘制等,具有操作简便、装配费用低廉、高效等优点。在军事侦察,农林勘测,灾害探测,输电线路巡查,玩具航模,航空摄影,气象探测等方面具有极高的军事应用价值。四旋翼无人机的飞行原理看似平平无奇,但其实暗藏玄机,无论是机身的结构设计,亦或是传感器的滤波算法,控制系统和软件的设计,都少不了理论的支撑。本文是进一步深化对四旋翼飞行器的姿态控制,希望能够促进四旋翼飞行器技术的发展,为我国四旋翼飞行器在环保、气象、消防、侦查跟踪等军事及民用方面的产业化提供重要的技术支撑。我知道研制出价格低廉、性能优良的飞机,将会带来巨大的经济利益,极大地促进我们国家的科技进步。
1.2 国内外四旋翼飞行器的发展现状
1.2.1 国内四旋翼飞行器的发展现状
四旋翼飞行器现在在我国已经盛行,甚至已经形成了一个产业,这都得益于它不断被改造完善。当前四旋翼无人机的发展现状是:
⑴姿态控制问题:目前最大的困难是如何稳定有效地控制其飞行状态。由于四旋翼无人机具有较多的螺旋桨,所以它的操纵要比常规的直升飞机更加困难[2.]。近年来,国内外学者对飞机的数学模型、飞机的控制算法以及飞机的滤波算法等方面进行了深入的研究[21.]。并以此前提,一种全新的自适应控制算法被提出,引起了学术界的热烈讨论与分析。
(2)随着四旋翼飞行器的新型传感技术的不断发展,目前国际上已逐步形成一种可集成化的传感组件,如MPU6050传感器可以完美的结合加速度计与陀螺。
(3)马达及蓄电池方面的开发。近年来,随着无刷电动机、空心杯电动机在四旋翼飞行器中的广泛使用,四旋翼飞行器的功率有了较大的提升。航空器的续航里程也得益于飞速发展的锂离子电池、燃料电池等技术,得到了不小的提高[22.]。
(4)全球定位系统(GPS)的开发。在卫星定位系统科技的蓬勃发展与壮大过程中,GPS也逐渐地被运用在了旋翼航空器中,这样一来人们也就不再担忧在航空器故障后会不会找不到了。因为人们能够通过GPS实现卫星定位系统,同时还能够设定航点,从而实现了航空器的自由航行。
(5)现在,无线传输的应用越来越广泛,帮助实现了手机的遥控控制,蓝牙、 WLAN等无线传输方式被广泛运用到飞行器上,为无人机遥控技术提出了新的伟大构想。
不过与国外的发展速度相比,中国的无人机发展速度就慢了很多,而且由于国外的技术封锁,中国的研究进度也被拖得很长。也正是因为如此,像是无人驾驶飞机这样的尖端技术,基本上都被各个航天科研院所以及少数几家高科技公司给包圆了。现在,我国已经有不少公司在进行四旋翼飞机的商品化。其中最著名的一家,就是大疆创新,它在深圳成立于2006年,在四旋翼无人机方面,一直都很活跃,并推出了很多主要的飞机,得到了很好的市场反馈。精灵2 vision+飞行器,这款飞行器自带一个带有高清摄像头的云平台,云平台采用了三轴陀螺减振和 GPS定位,飞起来非常平稳,而且操作起来非常容易,就算是没有操作过的人员,都可以轻松起飞。在国内外享有很高的声誉。
1.2.2 国外四旋翼飞行器研究现状
现阶段,研究的主体方向是对四旋翼飞行器的姿态控制,类似于神经元网络控制算法,模糊自适应控制算法等研究。以下是几种四旋翼飞行器的简介。
首先就是Draganflyer系列四旋翼飞行器,它是由美国Draganflyer公司开发的[26.]。四旋翼无人机的主体是一种高强度、高质量的碳纤维,而这种碳纤维的使用,可以将大部分的能量都用在外部的传感器上,方便拍摄,而且,它由四台无刷电动机提供能量,不需要任何操纵杆,因为这四台电动机不仅能提供能量,而且还能充当操纵杆,让它的飞行变得更加平稳。与Draganflyer无人机同样具有代表意义的还有AR. Drone,Parrot的无人机在Draganflyer的螺旋桨上多了一层防护罩,把防护罩连在一起,这样不仅能提高飞机的稳定性,还能起到防护作用。AR. Drone可谓是别出心裁,提出了运用手机控制无人机的创新思路,打破了遥控器控制的的传统桎梏局面,各种新奇的操作模式不禁让人跃跃欲试,采用了在飞行器上的 MEMS传感器,并配上了众多的传感器, AR. Drone还具有工作范围更广的优势。随着无人机研发的不断深入,它的售价也水涨船高,德国MD4-200的机身全部由碳纤维制成,纯黑色的外观,让它看起来更加光彩夺目,同时,它的载重能力也得到了极大的提升,最关键的是,它的电量和续航时间都得到了极大的提高,这让它在执行很多任务时都变得更加便利。这架无人机还配备了 GPS和摄像头,可以在任何情况下都方便的完成各种飞行任务。
现在不少研究机构都在研究四旋翼无人机,比如美国的麻省理工,就推出了一款名为“多机合作”的无人机。本文介绍了一种基于地面站的多机协作系统,并对其进行了详细的仿真分析。到目前为止,这一试验已经在一台地面站上完成了一台多台无人驾驶飞机的试验,可以通过这台装置实现对地面目标的全方位监控和多角度跟踪。四旋翼无人侦察机内置的位姿感应器,可以精确地检测出无人侦察机的真实位姿。根据所获得的多个信息,规划和重构了航迹。可以说,在多个飞行器的配合下,无人机的智能程度已经达到了一个新的高度。
1.3 本文研究方法和内容
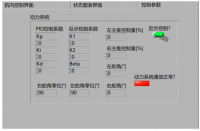
本课题以四旋翼飞行器的姿态检测传感器为基准,利用 PID算法对其进行校正,从而达到自动稳定的目的,并具有自主飞行与远距离操控两种方式;通过姿态解算算法和数据融合算法,实现飞行模式的切换和姿态角的测量,在飞行器发生故障和报警错误时,自动切换到人工操纵,并由遥控器操纵无人机,使飞机保持平稳飞行。最后,进行了大量的试验,对试验结果进行了分析,结果表明,所设计的姿态参考系统可以稳定地工作,并表现出良好的性能。
参考文献
[1.]闫飞云.一种多旋翼飞行器的系统设置[J].数码世界,2018,(7):161.
[2.]陈恒.倾转旋翼飞机技术发展研究[J].飞行力学,2007,(1):5-8.
[3.]顾文杰.六旋翼农药喷洒无人机的结构设计[J].安徽农业科学,2015,(31):335-337,345.
[4.]陈红卫.基于CC2530的通用无线加速度传感器的硬件设计[J].电脑编程技巧与维护,2019,(2):152-154.
[5.]疏婷婷.穿戴式人体运动实时数据采集系统[J].时代农机,2017,(12):131,146.
[6.]王伟. 基于无人机的恶臭溯源关键技术研究与系统开发[D].中国计量大学,2019.DOI:10.27819/d.cnki.gzgjl.2019.000153.
[7.]杨浩荣.MIMU中陀螺仪漂移误差滤波与温度补偿技术[J].信息通信,2016,(5):37-38,39.
[8.]何谦.卡尔曼滤波在船载雷达伺服速率陀螺中的应用[J].遥测遥控,2012,(1):43-46,63.
[9.]李宁睿. 中低速磁悬浮轨道检测装置的开发与研究[D].湘潭大学,2017.
[10.]王珏.船载GPS测姿系统数字滤波算法[J].中国惯性技术学报,2009,(3):284-287.
[11.]万永刚. 技术创新视野中的加速器发展[D].华东师范大学,2005.
[12.]李广,沈纪元,杜彤,仲启帅.X型四旋翼无人机的设计与研究[J].科技资讯,2020,18(24):97-99.DOI:10.16661/j.cnki.1672-3791.2004-5653-1976.
[13.]温俭.多旋翼无人机在输电线路精细化巡检中的应用[J].电力系统装备,2020,(8):75-76.
[14.]王庭文. 浅谈电动自行车的火灾危险性及防范措施[C]//安徽省科学技术协会,安徽省消防协会.2011安徽省科协年会——海湾杯“社会消防安全管理创新”专题年会论文集.[出版者不详],2011:208-215.
[15.]王赛赛. 基于自抗扰控制的四旋翼无人机飞行控制研究[D].哈尔滨工程大学,2019.
[16.]董伟.基于软件无线电的数字通信信号产生技术[J].电子产品世界,2006,(21):114-117.
[17.]黄润.基于传感器信息融合的AGV路径跟踪技术设计与应用[J].机电信息,2019,(15):85-87,89.
[18.]李宁睿. 中低速磁悬浮轨道检测装置的开发与研究[D].湘潭大学,2017.
[19.]陈明明.基于ARMA建模的MEMS陀螺随机误差补偿改进算法研究[J].传感器世界,2014,(5):7-13.
[20.]谢义建.基于STM32的四旋翼飞行器的设计与实现[J].四川理工学院学报(自然科学版),2014,(3):42-45.
[21.]齐洁. 多轮系飞机刹车系统控制与仿真研究[D].西北工业大学,2007.
[22.]姚硕. 钴基氧还原催化剂的制备和性能研究及无膜燃料电池的设计和优化[D].济南大学,2019.DOI:10.27166/d.cnki.gsdcc.2019.000514.
[23.]曲春晓,陈伟.卡尔曼滤波在飞行器姿态获取系统中的实现[J].交通信息与安全,2011,29(06):139-142.
[24.]郑健. 基于9轴传感器的姿态参考系统研究与实现[D].电子科技大学,2013.
[25.]李昂.基于SINS/轴编码器组合的采煤机定位方法与试验研究[J].煤炭科学技术,2016,(4):95-100.
[26.]李航. 共轭梯度算法对四旋翼PID飞控系统的优化与实验研究[D].太原理工大学,2017.



