



仿人双足机器人平衡控制研究
摘要
20世纪40年代,伴随着遥控操纵器和数控制造技术的出现,关于机器人技术的研究开始出现。经过几十年的发展,数百种不同结构、不同控制系统、不同用途的机器人已进入了实用化阶段。目前,机器人大多以轮子的形式实现行走功能阶段。真正模仿人类用腿走路的机器人还不多,虽有一些六足、四足机器人涌现,但是两足机器人还是凤毛麟角。本课题主要针对仿人双足机器人平衡控制研究、分析、设计,然后材料加工制作,最后进行组装和行走调试。
关键词 仿人双足机器人 平衡控制研究 设计 制作
Abstract
In 1940s, along with the remote control and digital manufacturing technologies, the researches on robot technology were appeared. After decades of development, hundreds of different structures, different control systems, and different uses of the robots have been entered into a practical stage. At present, most robots use wheel to realize the function phase of walking. But there is little robot can imitate human walking that with two legs , although a number of six-legged, four-legged robots have emerged, two-legged robots are rare. So the main topics of this study is to research, analysis and design on the two-legged walking robot, and product materials, then set up them and do some adjustment through walking in the final.
Keywords research design facture
目录
1 绪论 4
1.1 引言 4
1.2 机器人的发展及技术 4
1.2.1 机器人的发展 4
1.2.2 机器人技术 5
1.3 两足机器人的优点及国内外研究概况 5
1.3.1 双足机器人的优点 5
1.3.2 双足机器人的步态特点及研究意义 6
1.3.3 国外研究概况 6
1.3.4 国内研究概况 9
1.4 本文的研究工作 10
1.5 论文的构成 11
2 仿人双足机器人直立平衡控制的模型研究 12
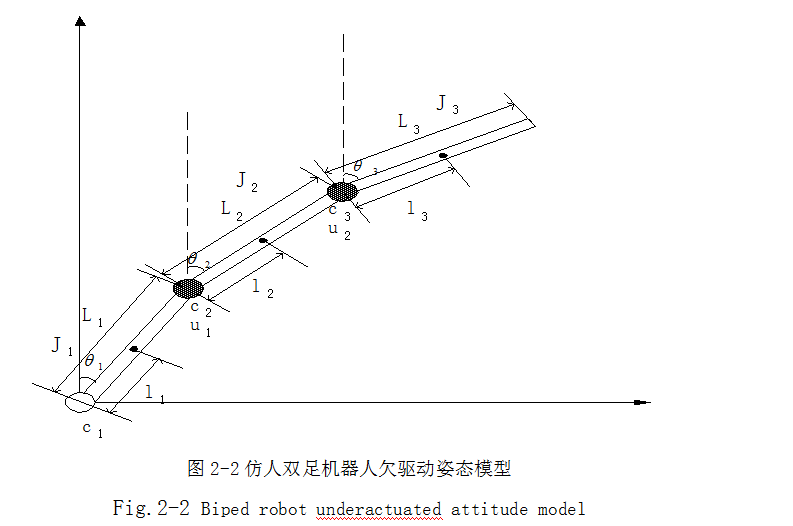
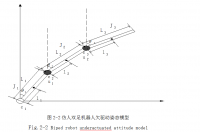
2.1.仿人双足机器人的欠驱动姿态 12
2.1.1 模型简化的提出 12
2.1.2仿人双足机器人欠驱动姿态分析 12
2.2物理模型 14
2.3数学模型 15
2. 4 Matlab仿真模型 17
2. 5小结 17
3仿人双足机器人系统的能控能观性分析 18
3.1 平衡稳定控制目标分析 18
3.2 能控制性与能观测性分析 18
3. 3小结 19
4 平衡控制策略 20
4.1 LQR控制器简介 20
4.2线性二次型调节器(LQR)基本原理 20
4. 3 平衡控制的仿真实现 21
4. 4 小结 22
5仿真实验 23
5. 1控制器仿真模型 23
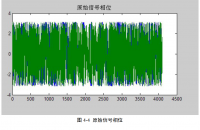
5. 2仿真的结果曲线 24
5. 3小结 26
6结论与展望 27
参考文献 27
1 绪论
1.1 引言
目前,机器人已形成一个不同技术层次、应用于多种环境的“庞大”家族,从天上到地下,从陆地到海洋到处都可以看到机器人的身影。世界著名机器人专家,日本早稻田大学的加藤一郎教授曾经指出“机器人应当具有的最大的特征之一是步行功能”。步行机器人的研究涉及到多门学科的交叉融合,如仿生学、机构学、控制理论与工程学、电子工程学、计算机科学及传感器信息融合等。仿人形机器人正成为机器人研究中的一个热点,其研究水平,在一定程度上代表了一个国家的高科技发展水平和综合实力。研究仿人形双足步行机器人,除了具有重要的学术意义,还有现实的应用价值。
1.2 机器人的发展及技术
1.2.1 机器人的发展
20世纪40年代,伴随着遥控操纵器和数控制造技术的出现,关于机器人技术的研究开始出现。60年代美国的Consolidated Control公司研制出第一台机器人样机,并成立了Unimation公司,定型生产了Unimate机器人。20世纪70年代以来,工业机器人产业蓬勃兴起,机器人技术逐渐发展为专门学科。1970年,第一次国际机器人会议在美国举行。经过几十年的发展,数百种不同结构、不同控制系统、不同用途的机器人已进入了实用化阶段。
目前,尽管关于机器人的定义还未统一,但一般认为机器人的发展按照从低级到高级经历了三代。第一代机器人,主要指只能以“示教-再现”方式工作的机器人,其只能依靠人们给定的程序,重复进行各种操作。目前的各类工业机器人大都属于第一代机器人。第二代机器人是具有一定传感器反馈功能的机器人,其能获取作业环境、操作对象的简单信息,通过计算机处理、分析,机器人按照己编好的程序做出一定推理,对动作进行反馈控制,表现出低级的智能。当前,对第二代机器人的研究着重于实际应用与普及推广上。第三代机器人是指具有环境感知能力,并能做出自主决策的自治机器人。它具有多种感知功能,可进行复杂的逻辑思维,判断决策,在作业环境中可独立行动。第三代机器人又称为智能机器人,并己成为机器人学科的研究重点,但目前还处于实验室探索阶段[1]。
机器人技术己成为当前科技研究和应用的焦点与重心,并逐渐在工农业生产和国防建设等方面发挥巨大作用。可以预见到,机器人将在21世纪人类社会生产和生活中扮演更加重要的角色。
参考文献
[1]UnderacturedPostureControlofTheHumanoidRobot,ChengjunLiu,FangzhengXue,Institute of Intelligent Autommation Chongqing University Chongqing.
[2] 李祖枢,谭智,张华,等.三关节单杠体操机器人的倒立稳定控制.CCC04 第 23 届中国控制会议论文集.2004 年 8 月,无锡.p1188-1192.
[3] http://www.honda..co. jp/robotl
[4]马宏绪,张彭,张良起.两足步行机器人动态步行的步态控制与实时时位控制方法.机器人.1998, 20(1):1-8页
[5]绳涛,马宏绪,王越.仿人机器人未知地面行走控制方法研究.华中科技大学学报.2004, 32: 161一163页
[6]A.Goswami,”Postural stability of biped robots and the foot-rotation indicator (FRI) point,”International Journal of Robotics Research, vol.18,no.6,pp.523–533,1999.
[7]M.Vukobratović and D.Jurici, “Contribution to the synthesis of biped gait,”IEEE Trans.Bio-Medical Engineering, vol.BME-16,No.1,pp.1-6,1969.
[8]S.Kajita,F.Kanehiro,K.Kaneko,K.Fujiwara,K.Harada,K.Yokoi,and H.Hirukawa,“Biped walking pattern generation by using preview control of zero-moment point,”Proc.IEEE Int.Conference on Robotics and Automation,2003,pp. 1620–1626.
[9]H.O.Lim and A.Takanishi,“Compensatory motion control for a biped walking robot,” Robotica,vol.23,pp.1-11,2005.
[10]P.B.Wieber and C.Chevallereau,“Online adaptation of reference trajectories for the control of walking systems,”Robotics and Autonomous Systems,54(7), pp.559–566,2006.



