










基于solidworks梳齿式茶叶采摘机器人结构设计
摘要
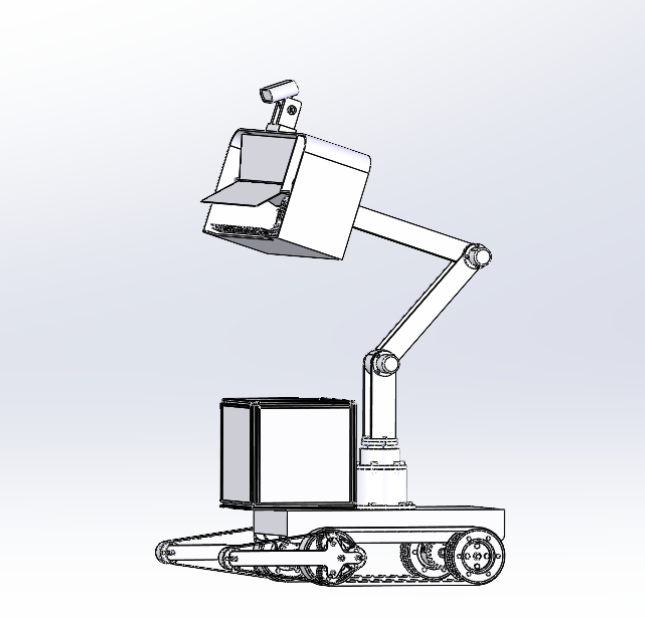
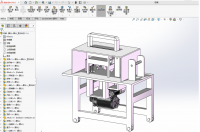
茶叶采摘机器人是从茶树顶梢采收新嫩茶叶的作物收获机械,根据采摘的方法不同可以分为选择性茶叶采摘机器人和非选择性茶叶采摘机器人两类。其中非选择性茶叶采摘机器人利用剪切原理采摘茶叶,因为其结构简单,使用较方便,所以得到了大力的推广。如今机械化采茶效率是手工采茶的近10倍以上,是解决当前茶叶采摘劳动力严重缺乏的根本手段。日本是国外最早研究使用机械设备进行采茶工作的国家,从最开始的利用大剪刀进行采茶,到现在研发的履带式、乘用型茶叶采摘机器人、自走式茶叶采摘机器人等,大大提高了茶叶采摘机器人的自动化程度,已基本实现机械化采茶。我国的机械采茶研发工作起步相对较晚,曾因零件受限和机械质量问题而停滞不前。近几年来,国内工业综合水平不断提高,有关部门也重视起对茶叶采摘生产的问题和技术的研究,使目前我国的采茶产业机械化得到了快速的发展。本文采用梳齿式采茶机构,通过功能和设计任务的分析,确立了茶叶采摘机总体功能构架;接着,对本采摘机车体结构部分、梳齿式采茶机构进行了详细设计与校核并采用Solidworks三维设计;然后,进行仿真分析,确保茶叶采摘机结构最优,效率最高,性能最优;最后采用AtuoCAD软件绘制了采摘机的装配图及主要零件图。
关键词:茶叶采摘机;履带;采摘机器人;车体结构;梳齿式采茶机构;Solidworks
Abstract
Tea picking robots are crop harvesting machinery that harvest new and tender tea leaves from the top of tea trees. Depending on the picking method, they can be divided into two categories: selective tea picking robots and non selective tea picking robots. Among them, non selective tea picking robots use the cutting principle to pick tea leaves. Due to their simple structure and convenient use, they have been widely promoted. Nowadays, the efficiency of mechanized tea picking is nearly 10 times higher than that of manual tea picking, which is the fundamental means to solve the serious shortage of labor force in tea picking. Japan is the first country abroad to research the use of mechanical equipment for tea picking. From the initial use of large scissors for tea picking, to the current development of tracked, passenger type tea picking robots, self-propelled tea picking robots, etc., the automation level of tea picking robots has been greatly improved, and mechanized tea picking has been basically achieved. The research and development of mechanical tea picking in our country started relatively late, and was once stagnant due to limited parts and mechanical quality issues. In recent years, the comprehensive level of domestic industry has been continuously improving, and relevant departments have also attached importance to the research and technology of tea picking production, which has led to the rapid development of mechanization in China's tea picking industry. This article adopts a comb tooth tea picking mechanism and establishes the overall functional framework of the tea picking machine throsolidworksh analysis of its functions and design tasks; Subsequently, detailed design and verification were carried out on the structure of the picking locomotive body and the comb tooth tea picking mechanism, and Solidworks 3D design was adopted; Then, conduct simulation analysis to ensure the optimal structure, highest efficiency, and optimal performance of the tea picking machine; Finally, AtuoCAD software was used to draw the assembly drawing and main component drawings of the picking machine.
Key words: Tea picking machine; track; Picking robot; Vehicle structure; Comb tooth tea picking mechanism; Solidworks
目录
第1章 绪论 4
1.1研究背景 4
1.2研究目的及意义 4
1.3国内外研究及发展现状 5
1.3.1国内研究现状 5
1.3.2国外研究现状 7
第2章 总体方案设计 8
2.1设计参数 8
2.1.1设计技术参数 8
2.2方案选定 9
2.2.1车体方案设计 9
2.3.2驱动方案的选择 9
2.3工作原理分析 10
第3章 采茶机机械结构设计 11
3.1行驶小车设计 11
3.1.1主电机的选择 11
3.1.2履带部分设计 13
3.1.3副履带部分设计 23
3.2 梳齿式采茶机构设计及计算 26
3.3分叶板结构设计及计算 28
2.4扫叶轮结构设计及计算 30
第4章 基于solidworks的三维设计 31
4.1 solidworks三维设计软件概述 31
4.2三维设计 31
4.2.1车体 31
4.2.2主履带 32
4.2.3副履带 32
4.2.4三维装配 32
总 结 34
参考文献 35
第1章 绪论
1.1研究背景
茶叶生产季节性强,“早采一天是宝,晚采一天是草”的说法中可以体现其时效的重要性。面对经济的发展,实现机械化采茶是必须切实面对的问题,而且能否采用机械化采茶已经成为目前制约茶叶生产发展的一个瓶颈,从采茶用工难的问题上可见一斑。目前,在茶园很难见到年龄较小的采茶工,一般年龄都比较大。由于采茶工人员的短缺,于是出现了争抢采茶工的问题。因此,由于缺少采茶工,致使茶园的茶叶不能及时的采摘。随着经济的快速发展,采茶工短缺的问题越来越凸显。据统计,每亩茶园平均要用1名采茶工,然而全国茶园面积几千万亩,在采茶季节集结数量这么多的采茶工是十分困难的。机械化采茶效率是手工采茶的近10 倍以上,是解决当前茶叶初制劳动力严重缺乏的根本手段,生产中机械化采茶虽然任务十分艰巨,但前景十分广阔。
基于上述背景,本课题旨在设计一种自行式茶叶采摘机器人,避免了手提式或背负式的负荷作业,可以有效的提高生产效率,保证鲜叶的品质,实现高要求的清洁化规模生产,降低劳动强度和生产成本。在各方面日益现代化的今天,炒茶机也应该在技术上不断改进,向自动化、机电一体化方向发展[1]。采用传统的人工炒制方法易造成质量参差不齐,工人劳动强度,生产率低[2],难以形成规模效益,为改变这种现状,研制小型的茶叶加工机械迫在眉睫[3]
1.2研究目的及意义
茶叶采摘机是从茶树顶梢采收新嫩茶叶的作物收获机械。根据采摘的方法不同可以分为选择性茶叶采摘机和非选择性茶叶采摘机两类。选择性茶叶采摘机有折断式和摩擦式等类型。折断式茶叶采摘机是利用弯曲折断的原理,采下鲜嫩的茶叶而保留粗老的枝条;后摩擦式茶叶采摘机则是用一对弹性摘指夹住茶叶,依靠摘指和茶叶之间的静摩擦力,摘下新叶并保留老叶和幼芽。因为生产的效率过低且对茶园作业条件的要求较高的原因,选择性茶叶采摘机没有获得大量推广。非选择性茶叶采摘机又称为剪切式茶叶采摘机,利用剪切原理采摘茶叶。因为其结构简单,使用较方便所以得到了大力的推广。非选择性茶叶采摘机的主要类型有往复切割式茶叶采摘机、钩刀切割式茶叶采摘机、螺旋滚切式茶叶采摘机等。
当今国内外普遍采用的茶叶采摘机都是针对大宗茶生产时采摘茶树鲜叶用的,它的基本原理是通过机械动力带动刀片的运动,快速的剪切并收集茶树的芽叶。从而实现采摘茶叶的目的。
1.3国内外研究及发展现状
1.3.1国内研究现状
我国茶叶采摘机械的研究工作开始于上世纪六十年代,最初是从日本引进采茶剪用于茶树的修剪。后来国内开始对采摘原理的进行研究和模拟采摘茶叶的试验,而且引进了日本菜茶机进行相关的试验与分析研究[1]。到目前为止,在茶叶采摘机相关领域已经经历了漫长的过程。此后茶叶采摘机的研究设计工作在我国各产茶省已经普遍展开。在六十年代初经过努力的研究,试制成功了往复切割式茶叶采摘机,较好的机型有中国农科院茶叶研究所和南京农业机械化研究所联合研制的手动南茶—702型茶叶采摘机、浙江农业大学研制的浙农—4号茶叶采摘机等。到六十年代中期,中国农科院茶叶研究所等单位在南茶—702型的基础上研制成功NIC型手提电动往复式茶叶采摘机组[1]。上世纪七十年代后期,先后设计出了多种单人茶叶采摘机,而且在全国进行了研究试验,比较它们的优缺点,但是最终却因这些茶叶采摘机的动力、软轴不过关和制造机器的水平有限,没能在生产中得到大量应用。到七十年代末期,受日本机械化茶树采摘的影响,我国加大了茶叶采摘机器人的研制工作。在此期间设计出多种平形、弧形往复切割式以及各种轻、深、重茶叶采摘机器人,然而因为茶叶采摘机的动力需要从国外引进,并且受到了制造厂企业规模的限制,生产的部分零部件的质量不是不是很好,因此推广应用进展较慢。八十年代末期,我国开始与国外开始合资生产茶叶采摘机,在杭州和长沙先后组建了长沙落后茶叶园林机械有限公司和浙江川崎茶叶机械有限公司。这两家合资企业都是从日本进口零部件,然后再国内进行装配,为了抓住这个机遇,农业部等部门从八十年代末期开始,一方面组织各主要采茶省的有关机械厂家对茶叶采摘机器人的生产技术进行引进、吸收和消化,加速研制国产茶叶采摘机器人的发展速度,另一方面加强茶叶采摘机的推广应用工作,从而使我国的茶叶采摘机器人机械化事业迈入了新的发展阶段。
参考文献
[1] 蔡自兴,刘健勤.面向21 世纪的智能机器人技术机器人技术与应用.1998(6)
[2] 李贻斌,现代科技革命与机器人的发展,山东交通学院学报.200210
[3] 白民,刘远江,从2004 中国国际机器人展览看中国机器人产业的现状和未来机器人技术与应用.2005
[4] 成大先. 机械设计手册(第5版)[M]. 北京:化学工业出版社,2008.
[5] 邓星钟主编.机电传动控制[M].第三版,华中科技大学出版社 2012
[6] 严霖元主编.机械制造基础[M].中国农业大学 2013
[7] 郑文纬,吴克坚主编.机械原理[M].高等教育出版社 2013
[8] 范思冲.画法几何及机械制图. 北京:机械工业出版社,1995:3―12.
[9] 于永泗、齐民主编,机械工程材料[M],大连:大连理工大学出版社,2007
[10] 余桂英、郭纪林主编,AutoCAD2008中文版实用教程[M],大连:大连理工大学出版社,2007
[11] 邵立新、夏素民、孙江宏等编著,solidworksNGINEER Wildfire 4.0中文版标准教程[M],北京:清华大学出版社,2007
[12] 王承义.机械手及其应用[M].北京:机械工业出版社,1981:105-125
[13] 徐丽明,张铁中.果蔬果实收获机器人的研究现状及关键问题和对策[J].农业工程学报,2004,20(5);38.
[14] 孙建设.我国苹果栽培模式的沿革与思考[J].专家视点,2008,2:22-24.
[15] 姜丽萍,陈树人.果实采摘机器人的研究综述[J].农业装备技术,2006,2,32(1):8-10.
[16] 崔玉洁,张祖立,白晓虎.采摘机器人的研究进展与现状分析[J].农机化研究,2007,(2):4-5.
[17] Ling P, Ehsani R, Ting K C, et al.Sensing and end-effector for a robotic tomato harvester[C]//ASAE Paper 043088,2004.
[18] S.Jacobsen, J. Wood, K. Bigger. The Utah/MIT hand: Works in progress [J].International Journal of Robotics Research.1986,4(3):221-250.



