




穿梭车(RGV)设计
摘 要
无锡市位于长江三角地区,经济发展迅速,自动化物流设备行业近年来发展迅猛。通过对无锡市的自动物流系统的市场调查,从调查目的、调查对象、调查范围、调查方式、调查内容等方面,对无锡这一城市的自动物流系统有了大概的一个了解。
对于现在的自动物流系统来说,穿梭车(RGV)是必不可少的,通过程序的设定能够完全实现自动操作,可以说是大大降低了人工操作的难度,而且工作效率也是大大提高了。本文就物流运输设备穿梭车进行深入研究、分析。
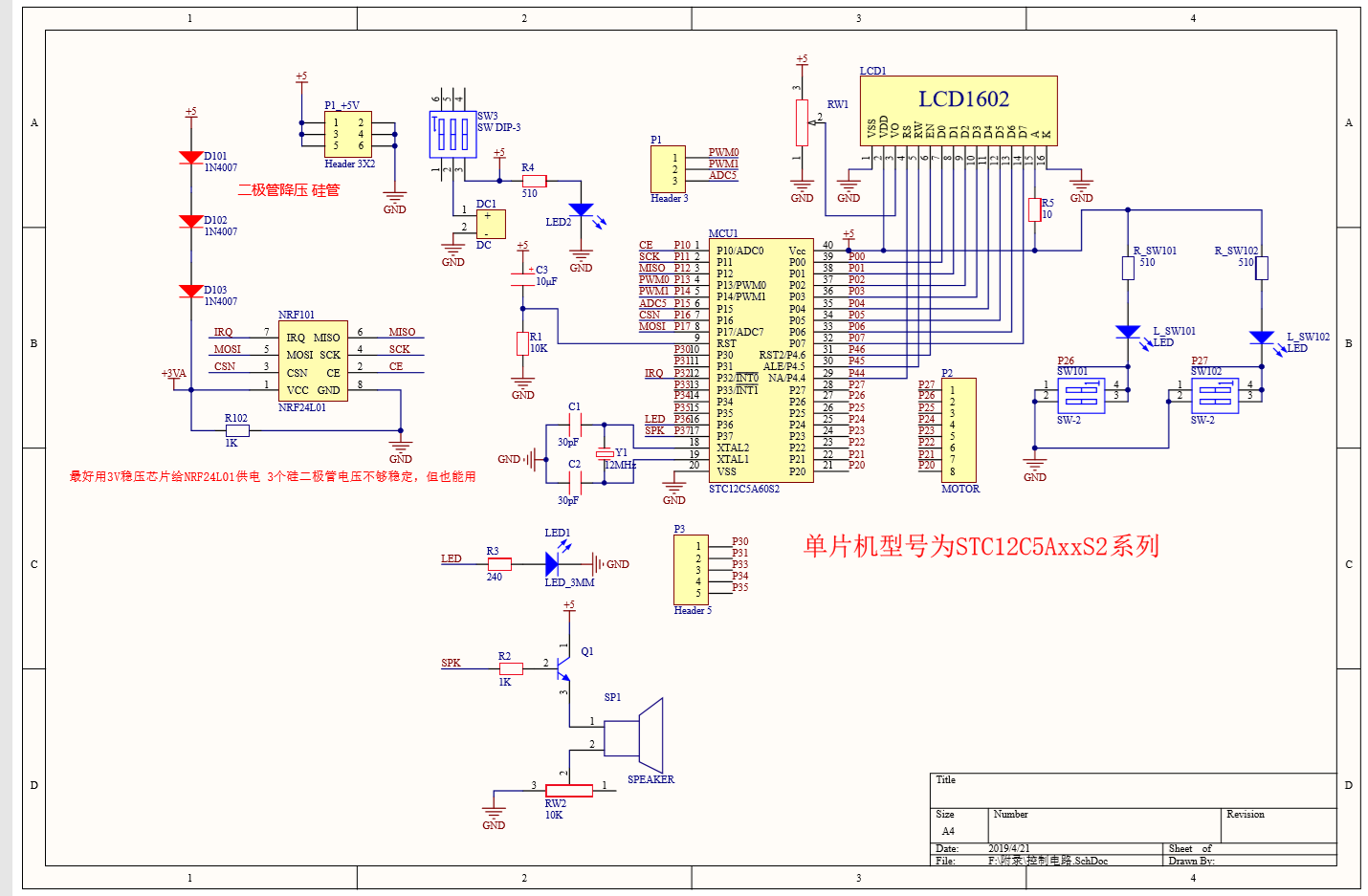
在本文中详细介绍了穿梭车的工作原理以及控制系统。并按照RGV的运行要求设计了一套微处理器控制系统,包括RGV的电机控制、RGV与上位机之间的信息传输、键盘输入和LED显示等人机交互手段以及RGV信息存储、声光报警等等。因为穿梭车上的直流伺服电机所控制的专用集成电路芯片的特点,我们将会换一种新的控制方法,想办法来进一步的提高穿梭车的位置精度。
关键词:穿梭车;RGV;微处理器;自动物流系统:伺服电机
Abstract
Wuxi City is located in the Yangtze River Delta, and its economic development is rapid. The automated logistics equipment industry has developed rapidly in recent years. Through the market survey of Wuxi's automatic logistics system, we have a general understanding of Wuxi's automatic logistics system in terms of survey objectives, survey targets, survey scope, survey methods, and survey content.
For the current automatic logistics system, the shuttle (RGV) is indispensable, and the automatic setting can be fully realized through the setting of the program. It can be said that the difficulty of manual operation is greatly reduced, and the work efficiency is greatly improved. This article conducts in-depth research and analysis on the shuttle of logistics and transportation equipment.
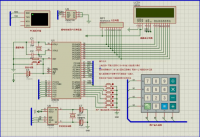
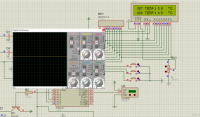
In this article, the working principle and control system of the shuttle are introduced in detail. According to the operation requirements of RGV, a microprocessor control system is designed, including RGV motor control, information transmission between RGV and host computer, keyboard input and LED display, and other human-computer interaction methods, as well as RGV information storage, sound and light alarm. According to the control characteristics of the DC servo motor control ASIC chip on RGV, a new control method is adopted, which makes the servo accuracy of RGV position further improved theoretically.
Keywords: Shuttle; RGV; microprocessor; automatic logistics system: servo motor
第一章 序言
1.1 课题来源及研究意义
今年已经是2019年了,在如今这么一个各行各业发展迅速的大时代背景下,物资运输的快捷性、方便性已经逐渐的被大众所意识到,不管是哪个行业的用户都意识到物流存储系统的发展能够推动各个行业的发展,所以呢,在这么一个有着重大意义背景之下就孕育了自动化的物流系统以及存储仓库的自动化。随着科学技术日益发展成熟,物流仓库系统的缺点就逐渐暴露出来,所以对于如何研究出对物流系统更有效、性能更高的物流设备是有着非常重大意义的。
1.2 穿梭车发展趋势以及应用领域
外国厂家很早很早就已经开始进行穿梭车的研究了,许多外国著名的物流企业在05年前后就已经推出了属于自己研发的穿梭车而且还经过不断的改良,其运行的速度、智能化的程度、便捷性都有了显著地提升。由国外先进厂家所研发的穿梭车它的运行速度基本上能够保持在4m/s以上,而且还包含着对路径进行智能规划的系统,能够对不简单的路线进行智能有效的规划。然而在我们国家中对于穿梭车的研究只能说是才刚刚起步,能够真正需要用到穿梭车的地方非常的少,并且能够供应穿梭车的商家也是屈指可数。与国外著名物流企业所研发的穿梭车相比国产穿梭车的性能实在不能说是高性能。我们国内的厂家自行推出的穿梭车运行速度甚至连2m/s都达不到,而且我们国内厂家所研发的穿梭车的智能化程度也是比较的低下,绝大多数国内的穿梭车还需要依靠仓库的软件系统来辅助的对路线进行规划。正是因为当前在我国穿梭车的发展状况并不是太好,我们国内的物流设备生产厂家非常需要尽早的研究出高速、高智能的穿梭车,能让国内的仓库智能存储行业得到非一般的提高发展。
1.3 本文主要研究内容
在这个经济发展迅速的时代下,任何跟不上时代发展的东西都会被淘汰,所以我们的工作方式需要更进一步,需要更高的工作效率。更何况与国外相比,我国自动物流仓库系统相对落后一些,因此为了各行各业的发展推动,发明有着更强大的性能的RGV小车是很重要的。所以本文就是分析说明以及设计先进穿梭车。
第二章 穿梭车总体分析
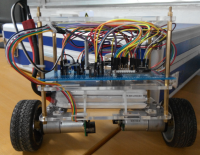
2.1穿梭车概述
穿梭车货架系统的组成包括下面几部分
1、穿梭车以及遥控器:如果穿梭车的控制方式是全自动的话呢,那么就不需要用到遥控器了,正常情况下穿梭车的尺寸都是定制的,常见尺寸是120*100cm
2、穿梭车导轨:每一辆的穿梭车都有着属于自己不同的导轨,一辆穿梭车的导轨是不能让其他的穿梭车来使用的,因为穿梭车是定制产品,所以不同的穿梭车它们的穿梭车数据也是不相同的。
3、穿梭车货架:穿梭车的存储货架密度都是高密度的。
4、自动化仓库的话还需要相应的软件等系统
5、托盘:穿梭车运输时所盛放物料的设备就是托盘,一般都是相互配合使用的。
2.1.1技术系统
下面所列举的技术都是对着生产穿梭车有着极其深远的影响。
1. 电池技术
在早期的时候对穿梭车进行控制都是用的半自动控制,不管是结构方面还是系统上的方面都并不算是特别复杂,关于电池方面的技术是能够直接影响穿梭车工作效率的。如何提高电池每次充满电能工作的时间是提升穿梭车性能的一个技术瓶颈。并且高性能的电池相对价格也更高昂。这也就间接导致了市面上供应的穿梭车很少。伴随着现在电池发展技术越来越高,产量大大增加,这才使得价格下降,能够广泛应用。
2. 电量监测技术
穿梭车的电量检测在早期是非常困难的我们可以先想一个这样的问题:万一穿梭车在工作中突然停电,那我们接下来该怎么办?而且在现实生活中这种工作时突然停电的情况每天都有可能发生。不能准确监测电量,那么发生的问题就得不到解决。这么严重的一个问题会直接让整个工作系统无法工作,这个情况也影响了穿梭车的推广应用。
3. 通讯和定位技术
再穿梭车刚刚研发出的时候通讯技术并不是非常的先进,所以引起了有些工作位置都是空的,而设备频繁的出现通讯毛病维护起来又是十分的困难,也是不能是穿梭车正常的进行工作。
目录
摘 要 II
Abstract III
目录 IV
第一章 序言 1
1.1 课题来源及研究意义 1
1.2 穿梭车发展趋势以及应用领域 1
1.3 本文主要研究内容 2
第二章 穿梭车总体分析 3
2.1穿梭车概述 3
2.1.1技术系统 3
2.1.2系统组成 4
2.2 穿梭车机械结构分析 4
2.3识别技术应用分析 5
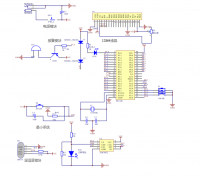
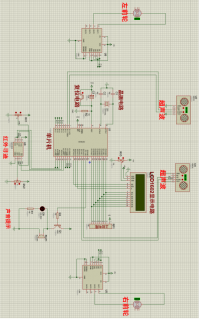
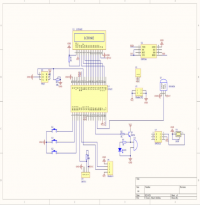
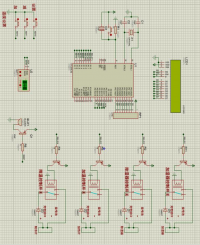
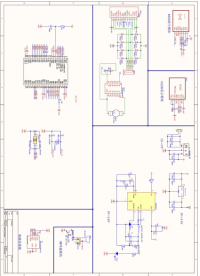
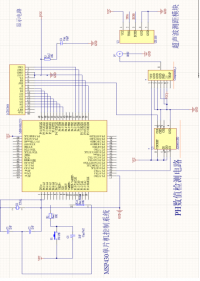
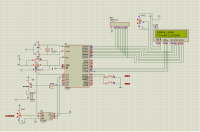
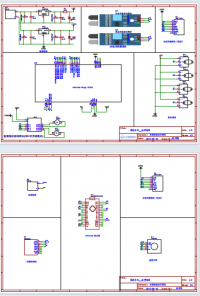
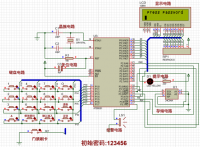
第三章 穿梭车硬件设计 6
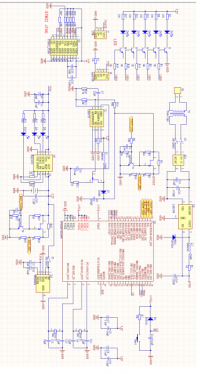
3.1控制系统硬件部分 6
3.2伺服电机控制 8
3.2.1直流PWM伺服驱动装置的选择 8
3.2.2由专用集成电路构成的PWM伺服系统 11
3.2.3伺服电机反馈输入 13
3.3步进电机控制 13
3.3.1电机控制输出 14
3.4键盘管理 16
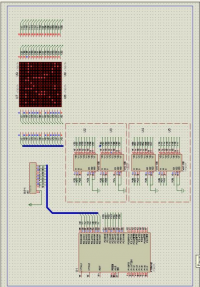
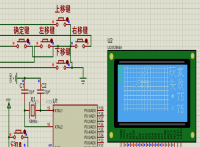
3.5信息显示 18
第四章 穿梭车软件设计 21
4.1控制系统软件部分 21
4.2工作流程及主要源码 23
第五章 结论 25
参考文献 26
毕业设计附录目录 27
参考文献
[1] J H Kim.Cooperation Multiagent System:From the Rpbot soccer PerspecTive[J]. proc.
Mirosot’97,June,1997:5—16.
[2] 裘华徕. 气动技术的近期发展及其影响因素[J]. 液压气动与密封.2002,1(3):1—3.
[3] 姜继海等.液压与气压传动[M].北京:高等教育出版社,2002.3.
[4] 王永昌, 潘先耀. 气动伺服控制系统及阀的应用形式[J]. 燕山大学学报.2002,26(3): 206—208.
[5] 李小宁.气动技术发展的趋势[J].机械制造与自动化.2003,2(2):1—4.
[6] 韩建海,张河新.气动比例/伺服控制技术及应用[J].机床与液压.2001,1(1):3—6.
[7] 薛阳等.气动位置伺服系统的带因子的非对称模糊PID控制[J].北京理工大学学报.2003,23(1):71—74.
[8] 何钺.现代控制理论基础(机械类)[M]. 西安:西安交通大学出版社,1987.1—2.
[9] 易继锴,侯媛彬.智能控制技术[M].北京:北京工业大学出版社,1999. 1—8,238—247.
[10] Ningshu,Wanglunyou.Computer“PCM”and Learning Control for PositionofPneumatic[J].
Fluid Power,edited by T.Maeda.E&FN –SPON,1993:583—588.
[11] 高翔,李光华,何国辉.气动伺服控制系统的自适应模糊控制器的研究[J].海军工程大学学报,2002,14(3):14—20.
[12] 贺国保,彭光正,伍清河.模糊PID控制在气动摆动缸位置伺服控制中的应用[J].液压与气动.2004,1(1):24—26.



