





















多工位焊接工序的电气控制设计
摘要:伴随着工业自动化的不断发展,针对于焊接生产线的生产工艺要求, 传统的焊接工业
迫切需要进行自动化的升级和改造。本课题着眼于自动化焊接的未来发展趋势,设计了一种
自动化多工位焊接流水线,该课题包括了生产线气动系统的设计、电气系统的设计, 并建立
了以 PLC 为基础的控制系统硬件架构, 给出了控制系统的程序。通过触摸屏仿真完成了系
统的初步设计。
关键词:PLC,气动系统,电气系统,触摸屏
Electrical Control Design of Multi-station
WeldingProcedure
Abstract: with the continuous improvement of the development level of industrial, requirements for welding production line, the traditional welding industry is in urgent need of automatic upgrading and transformation. This topic focuses on the future development trend of automatic welding, an automatic multi station welding line is designed..the function of pneumatic system in production line is introduced, functions of electrical system. The hardware architecture of control system based on PLC is established, the flow. Chart of the control system is given. The preliminary design of the system is completed by the touch screen simulation method. Keyword: PLC Pneumatic system Electrical system Touch screen
焊接应用背景介绍
随着近代工业的发展,越来越多的中小型企业开始摒弃原有的复杂而又老化 的生产工艺,开始引进自动化生产线生产商品,自动化生产线为何会得到大规模 的应用肯定是有原因的。首先是因为它的高效率,据有关统计表明自动化流水线 加工一个商品的平均效率是人工的三到五倍。其次是因为它可以长时间工作,有 的流水线是二十四小时工作的,这一点是人工永远不可能达到的,但是机器毕竟 是机器,只要是机器就会出现故障,出现异常,这一点是无法避免的,所以这就 少不了人工的监管了。下面来说说人工是通过什么手段来监管和控制自动化流水 线的。主要是依靠编程软件编写特定的程序来控制机器工作的动作的,当然编程 软件有很多,在这里就不一个个介绍了,下面我们就挑其中的一种来讲一讲。
PLC 是具有数据记录功能的,这就意味着 PLC 要具有记录数据的单元。PLC 可以通过自我诊断来提高系统的可靠性,减少系统的故障率,那它是如何来进行 自我诊断的呢?首先 PLC 会产生自检信号,接收器接收到这种自我信号后立刻开 始启动自检程序,由于 PLC 产生的自检多,所以 PLC 相对的故障率比较低。现代 工业中,码垛机器人的应用范围十分广泛,被应用于多个行业如食品包装,汽车 制造加工,物流仓储,机械加工,医疗设备制造等行业。在一些强度高,重复性 强,单一的工作岗位上,人工作业就要比机器逊色好多了,码垛机器人代替人工 劳作已经成为一种不可避免的趋势。
焊接就是通过高温或者高压,使两件或多件物品之间的原子相互结合的加工 工艺。焊接技术主要是应用在金属上,主要分为溶焊,压焊,钎焊三大类。焊接 时出现两个物体之间的缝隙称为焊缝。现代焊接技术已经可以焊出紧密性强,集 成度高且内外都无缺陷的焊缝。随着现代工业的发展,传统的焊接技术已经不能 满足于生产的需求。焊接技术与机器人技术相融合,产生了焊接机器人。焊接机 器人通过特殊的识别方法,可以快速的识别焊缝,并能够精确的进行焊接。由于 焊接机器人具有高工作效率,高精确性,现已在流水线生产中被普遍应用。近年 来机器人技术发展的十分迅速,像扫地机器人等越来越多的机器人开始逐渐进入 老百姓们的生活中。
目录
第一章 绪论 ....................................................... 1
1.1 现代工业及焊接应用背景介绍 .................................. 1
1.2 多工位焊接的总体设计方案 .................................... 2
第二章 气动部分.................................................... 3
2.1 气动系统综述 ................................................ 3
2.2 真空系统 .................................................... 4
2.3 气动系统原理图 .............................................. 5
2.4 气路硬件表 .................................................. 6
第三章 电气部分.................................................... 7
3.1 电气部分系统综述 ............................................ 7
3.2 硬件部分 .................................................... 9
3.2.1 硬件说明 .................................................. 9
3.2.2 电气硬件选用明细表 ........................................ 9
3.2.3 电气原理图 ............................................... 10
3.3 PLC 系统控制 ............................................... 10
3.3.1 硬件接线图 ............................................... 10
3.3.2PLC 总输入输出分配表 ...................................... 11
3.3.3 软件部分 ................................................. 12
第四章 触摸屏..................................................... 16
4.1 触摸屏综述 ................................................. 16
4.2 触摸屏选用 ................................................. 16
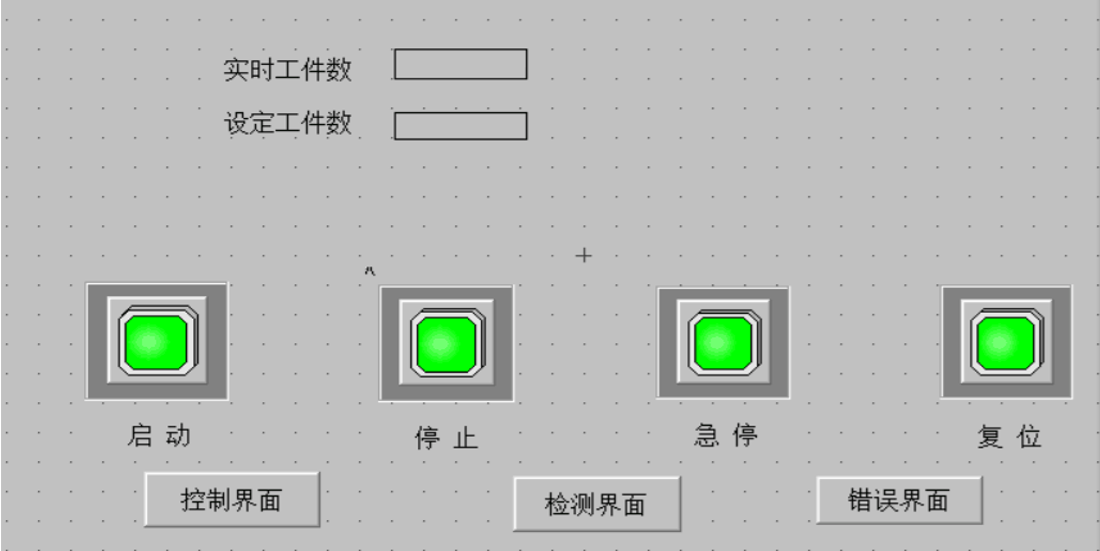
4.3 操作画面触摸屏组态方案设计 ................................. 16
总结............................................................... 18
参考文献........................................................... 19
附录 ............................................................................................................................................................. 20
参考文献
1 介贺彤.PLC 工程多模块智能化控制技术.电气技术与软件工程,2019(4)
2 张新荣.霍莹.王金民.基于 PLC 的生产线运料车控制系统设计.制造业自动化,2011(121-124)
3 高天宇.基于 PLC 的自动往返送料小车控制系统设计.数字技术与应用,2017(03)
4 胡敏.视觉系统在异型烟码垛机器人系统中的应用研究.重庆大学,2017
5 李渊龙.关节式四自由度码垛机器人结构设计及仿真研究.燕山大学,2017
6 徐智浩.机械臂轨迹跟踪控制若干问题的研究.南京理工大学,2016
7 龚力.基于移动平台的机械臂结构优化设计. 武汉理工大学,2012
8 邓立霞.移动机器人协调规划算法研究.山东大学,2016(4)
9 张帅帅.复杂地形环境中四足机器人行走方法研究. 山东大学,2016
10 袁小良.智能数控软 PLC 系统的设计与实现. 西安科技大学,2016
11 刘建英.PLC 编程的通用性研究及通用平台设计. 汕头大学,2010
12 张鑫.基于机器视觉的目标检测定位与路径控制方法研究.北京交通大学,2015
13 任金星.两轮自平衡小车自适应神经网络模糊控制研究. 西安电子科技大学,2009
14 孙扬智.基于双层模糊逻辑控制的智能小车研究.西南交通大,2016
15 朱家龙.赵志.电气过程中电气自动化应用研究.民营科技,2018(10)
16 韦刚.前车桥上料机器人智能工装的研究.河南工业大,2108
17 袁小良.智能数控软 PLC 系统的设计与实现.西安科技大学,2016
18 闫怡璇.基于 PLC 的模拟控制系统的研究与应用设计.西华大学,2012
19 王向丽.精确剪切设备送料机构的虚拟开发研究.兰州理工大学,2004



