



嫦娥三号软着陆轨道matlab仿真设计与控制策略
摘要
嫦娥三号从近月点 15 公里处,历经六个阶段,最终着陆在 19.51W,44.12N
处。本文通过建立数学模型,利用遗传算法,最终确定了嫦娥三号在近月点和远
月点的位置,以及相应速度的大小与方向;确定了嫦娥三号的着陆轨道和最优控
制策略;并对着陆轨道和控制策略做出相应的误差分析和敏感性分析。
在第一问中,我们认为卫星在近月点时所受到月球的万有引力完全作为卫星
绕月做匀速圆周运动时的向心力,并以此建立方程,得出卫星在近月点时速度大
小与方向。然后根据角动量守恒定律,得出卫星在远月点时速度的大小与方向,
最终得出卫星在近月点与远月点的速度分别为1.67km / s 和1.595km / s 。
在第二问中,考虑到卫星在主减速阶段下降高度达 12000m ,为软着陆过程
的主体部分。因此,本文以主减速阶段为主要研究对象,利用运动学原理,建立
了连续微分运动方程组及相应的初始条件。由于该微分方程组较难求解,故对模
型进行离散化处理,对每一阶段内的运动学变量建立方程组。
在此基础上,提出了两种模型:一是基于外推力控制的主减速阶段最优下降
模型M1[F(i),? (i)] ;二是基于外推力和下降速度联合控制的主减速阶段最优下降
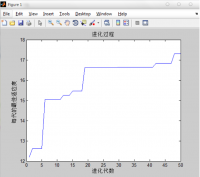
模型M2[F(i),vy (i)] 。同时,利用 matlab,结合遗传算法分别求解两种模型,对
两种模型的结果进行分析比较,最终得出模型二的性能最佳,最少耗油量为
1182.31 kg 。对模型二求解结果进行验证,表明其计算结果满足主减速阶段限速
57m / s 的要求,且其与竖直方向仅为-1.23°,利于后期方位调整。
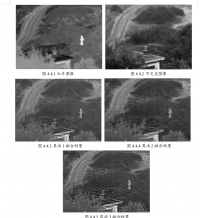
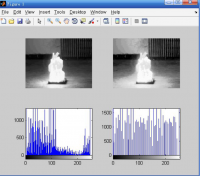
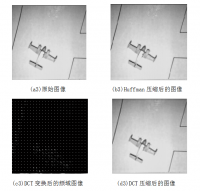
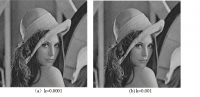
在快速调整至最终降落阶段,主要是利用图像处理知识,对月面图像的高程
信息进行分析,从而得出了最佳的着陆位置坐标。
在第三问中,对基于外推力和下降速度联合控制的主减速阶段最优下降模型
M2[F(i),vy (i)] 进行误差和敏感性分析。由于采用了遗传算法,故每次运行的结
果不一样。对该程序进行多次试算,结果表明,整体误差很小,在可接受范围内。
同时也说明其对参数的敏感性不强,具有较好的稳定性。
关键词: 运动轨迹 主减速阶段 运动微分方程组 离散化 遗传算法 图形处理
2
一. 问题重述
1.1 背景
2013 年 12 月 2 日 1 时 30 分,“嫦娥三号”探测器由长征三号乙运载火箭
从西昌卫星发射中心发射,首次实现月球软着陆和月面巡视勘察。12 月 10 日成
功降轨。嫦娥三号在高速飞行的情况下,要保证准确地在月球预定区域内实现软
着陆,关键问题是着陆轨道与控制策略的设计。
1.2 需要解决的问题
嫦娥三号在着陆准备轨道上的运行质量为2.4t ,其安装在下部的主减速发动
机能够产生 1500N 到 7500N 的可调节推力,其比冲为 2940m / s ,可以满足调整
速度的控制要求。嫦娥三号的预定着陆点为 19.51W,44.12N,海拔为-2641m。
着陆准备轨道为近月点 15km ,远月点 100km 的椭圆形轨道;着陆轨道为从近月
点至着陆点,其软着陆过程共分为 6 个阶段,要求满足每个阶段在关键点所处的
状态;尽量减少软着陆过程的燃料消耗。
根据上述的基本要求,建立数学模型解决下面的问题:
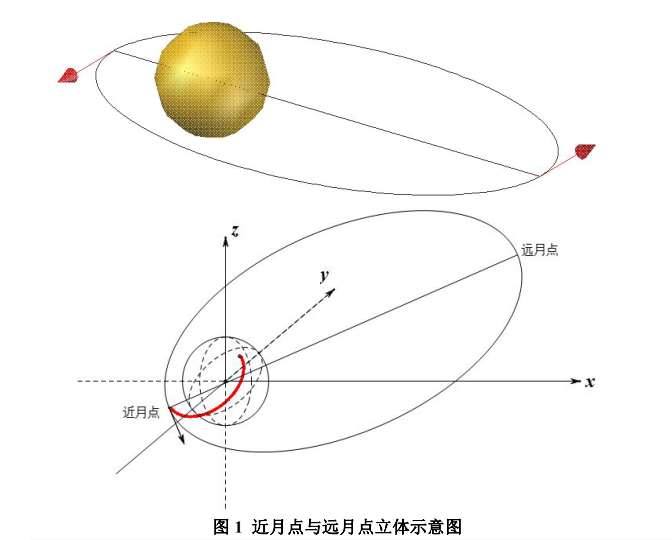
(1)确定着陆准备轨道近月点和远月点的位置,以及嫦娥三号相应速度的
大小与方向。
(2)确定嫦娥三号的着陆轨道和在 6 个阶段的最优控制策略。
(3)对于你们设计的着陆轨道和控制策略做相应的误差分析和敏感性分析。
二. 问题分析
问题一,由于嫦娥三号绕月球椭圆轨道运行,其受到的月球万有引力等于其
向心力,当它运行在近月点和远月点位置时,此时不存在轨道切向加速度,故可
利用公式求出速度的大小及方向。
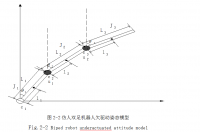
问题二,由于在进入主减速阶段时,嫦娥三号的运行速度较大,需要进行减
速,这部分下降高度为12000 m ,为软着陆过程的主体部分。而在其后的快速调
整直至最终降落阶段,只要是利用分布在前、后、左、右的 16 台姿态调整发动
机,进行姿态调整,且整个下降高度仅有 3000 m ,远小于主减速阶段。故主减
速阶段的耗油量决定着整个软着陆过程的总耗油量,在设定最优控制策略时,以
主减速阶段为研究对象符合实际。
在嫦娥三号运行过程中,随着燃料的消耗,其运行质量也会相应改变,属于
多变量耦合问题,虽然可以建立常规的连续微分运动方程组(初始条件可求),
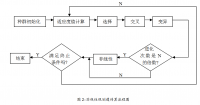
但是不易求解。所以,在本文中,将下降高度 12000 m 进行离散化处理,并对每
一阶段的外推力大小及方向或是外推力大小和下降速度进行随机控制,并结合遗
产算法,在满足主减速段收尾速度大小是 57 m / s 的前提下,寻找消耗燃料最少
的轨迹。
在快速调整至最终着陆阶段,主要是利用对月球表面拍的图像信息。因此,
可利用 matlab 的图像处理功能,对月球表面图像进行处理,获取高程信息,并
寻找最佳着陆点位置坐标。
问题三,由于模型采用的是遗产算法,其自身就是一种基于概率的优化算法,
因此每次运行结果都不一样。故可对所建立的模型进行多次试验,依据试验结果
分析所建立模型的整体误差以及敏感性。
3
三. 模型假设及符号系统
在进行理论计算时,为简化模型,我们进行以下假设:
1、嫦娥三号在运行过程中,各主要部件正常运行;
2、不考虑地球及其他行星产生的万有引力作用;
3、在计算中,一律采用月球平均半径;在月球表面不同位置处,月球的重
力加速度均相等,且视为常数;
4、小型姿态调整机的运行耗油量未给出,在计算中不计。
文中,符号表示如表 1 所示:
名称 含义 大小及单位
M 月球质量 7.3477×1022 kg
R 月球平均半径 1737.013 km
gm 月球重力常数 1.624 m? s?2
G 卡文迪许常数 6.67×10-11 m3 ? kg?1 ? s?2
m0 嫦娥三号初始运行质量 2.4t
v1 / v2 嫦娥三号在近月点和远月点的速度
大小
m? s?1
r1 / r2 分别为近月点和远月点到月球表面
的距离
km
H 主减速阶段下降距离 12000 m
V1 主减速阶段结束时的速度限制 57 m? s?1
F(i) 主发动机提供的平均推力
? (i) 主发动机推力方向
m(i ?1) 嫦娥三号的初始运行质量
m(i) 嫦娥三号的末尾运行质量
?m(i) 该阶段消耗的燃料公斤数
vx (i ?1) / vy (i ?1) 初始速度分量
vx (i) / vy (i) 结束速度分量
ax (i) 和ay (i) 该阶段的加速度分量
lx (i) / ly (i) 该阶段,嫦娥三号的位移分量
?t(i) 该阶段运行时间




