





















基于PLC控制机械臂的系统设计
摘要:在快速发展的现代工业中,机械臂的应用非常广泛与便捷。在航空航天等邻域里都有着不可取代的地位,在工业生产和其他在制造业内,由于工作的要求,人们可能会受到高温或者不利于人体健康的环境影响,增加了劳动的强度甚至危及生命。机械臂的诞生有效的解决了这些问题。并且在当今社会制造业发达,制造过程的自动化是制造业比较重视的一环,使用机械臂可以降低成本,提高效率。并且可以提高准确率。
本论文从机械臂的工作方式出发,阐述使用PLC对机械臂进行工作顺序的编程。使机械臂可以实现左右移动,上下移动,夹紧和收缩。控制系统利用PLC控制,通过控制电动机来实现机械臂的上下左右的移动。并且机械臂具有复位功能,在发生故障时可以复位停止工作。本文中设计的机械臂是由步进电机控制上下左右的移动。
通过上述描述,机械臂可以按照程序的要求进行工作。
关键器:机械臂; PLC; 步进电机
System design of mechanical arm based on PLC control
Abstract: with the rapid development of modern science and technology, mechanical arm in industrial production, aerospace and so on all has the irreplaceable position, in the industrial production and other neighborhood, because of work requirements, people may be limited by the high temperature or detrimental to human health of environmental impact, increased the intensity of labor and even life-threatening. The birth of the robot arm effectively solved these problems. In addition, in today's developed manufacturing industry, automation of manufacturing process is a relatively important link in the manufacturing industry. The use of mechanical arm can reduce costs and improve efficiency. And it improves accuracy.
Starting from the working mode of the manipulator, this paper expounds the working sequence programming of the manipulator by using PLC. So that the mechanical arm can achieve left and right movement, up and down movement, clamping and contraction. The control system is controlled by PLC, and the movement of the mechanical arm is realized by controlling the motor. And the mechanical arm has a reset function, in the event of failure can be reset to stop working. The electrical structure of the mechanical arm consists of servo motor, drive module, limit switch, solenoid valve, sensor and so on.
Through the above description, the robot arm can work according to the requirements of the program.
Key device: mechanical arm; PLC; stepping motor
目录
摘要
第一章 绪论 1
1.1课题研究的目的及意义 1
1.2 机械臂研究现状 1
1.3 本文主要研究的内容 1
第二章 机械臂的结构与系统设计 2
2.1 机械臂结构 2
2.2机械臂的类型与应用 2
2.3机械臂系统设计 3
第三章 硬件设计 3
3.1 电路设计 3
3.3 PLC的选型及简介 4
3.3.1 PLC的简介 4
3.3.2 PLC的特点及控制 5
3.3.3 PLC的选型 5
3.3.4 PLC的输入/输出模块 6
3.4 电动机的选择及原理 6
3.4.1 电动机的选择 6
3.4.2 步进电动机的结构 7
3.4.3 步进驱动器 7
3.4.4 步进控制器 7
3.5 电路中其他元器件 8
3.5.1 继电器 8
3.5.2开关型电器 8
3.5.3 电磁阀 9
3.5.4 传感器 9
3.5.5 旋转编码器 9
3.6 电路图设计 10
3.6.1 I/O分配表 10
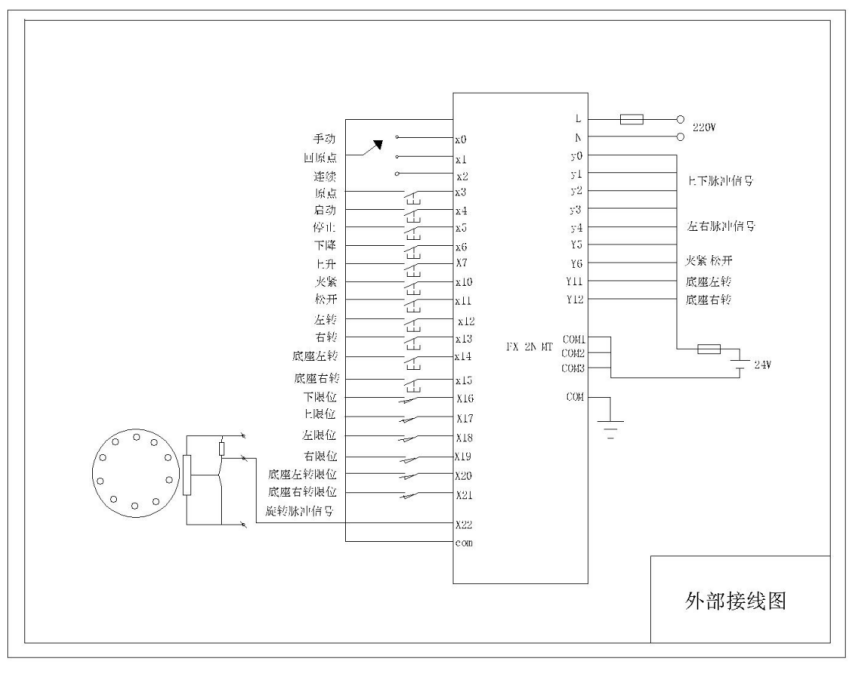
3.6.2 外部接线图 10
第四章 软件设计 11
4.1 三菱FX型可编程控制器的使用 11
4.2 机械臂控制系统的工作流程 11
4.3 程序说明 12
第五章 软件的调试与说明 15
5.1软件的调试 15
5.2 软件的说明 16
第六章 总结 16
致谢 17
参考文献 18
附录
参考文献
[1]殷庆纵,李洪群,臧华东,孙岚. 可编程控制器原理与实践[M]. 北京:清华大学出版社,2010.
[2]吴红霞,刘洋,周明. 电气控制及PLC原理与应用[M]. 北京:冶金工业出版社,2011.
[3]陶权,韦瑞录. PLC控制系统设计、安装与调试[M]. 北京:北京理工大学出版社,2011.
[4]郭琼. PLC应用技术[M]. 北京:机械工业出版社,2014.
[5]韩清凯,张昊,任云鹏,刘金国. 机械臂系统的控制同步理论与应用[M]. 北京:国防工业出版社,2014.
[6]高钦和. PLC应用开发案例精选[M]. 北京:人民邮电出版社,2008
[7]赵俊生. 电机与电气控制及PLC[M]. 北京:电子工业出版社,2012.
[8]张万忠,孙晋. 可编程序控制器入门与应用实例[M]. 北京:中国电力出版社,2007.
[9]张晓娟. 工厂电气控制设备[M]. 北京:电子工业出版社,2012.
[10]廖常初. PLC基础及应用[M]. 北京:机械工业出版社,2008
[11]王永华. 现代电气控制及PLC应用技术[M]. 北京:航空航天大学出版社,2008.
[12] 刘小春,张蕾. 电机与拖动[M]. 北京:人民邮电出版社,2016.
[13]张伟林. 电气控制与PLC综合应用技术[M]. 北京:人民邮电出版社,2009.
[14]徐铁. PLC应用技术[M]. 北京:中国劳动社会保障出版社,2007.
[15]罗光伟. 可编程控制器教程[M]. 成都:电子科技大学出版社,2007.
[16]许建国. 电机与拖动基础[M]. 北京:高等教育出版社,2004



