





















控制工程绪论论文
只要有目的地利用能量,都有必要采取某种控制形式。近年来,在自动控制领域取得了相当大的进步,其实这种技术历史悠久,可以追溯到1790年,当时瓦特就发明了离心式调速器来控制蒸汽发动机的转速。他发现在一下应用中有必要保持发动机转速不随负荷扭矩的变化而变化。旦事实上,当加一个负载时速度就会下降或者去除负载后速度就会增加。
在一个简单的离心调速系统中,发动机转速的变化被探测并用来控制进入发动机的蒸汽压力。在稳定条件下,由于离心力的作用和蒸汽阀的开度足够维持发动机转速所要求的水平,瞬间与金属球的重量平衡。当额外的负荷扭矩加到发动机上,发动机的转速就会下降,离心力减少,金属球将会轻微下降,开口度控制蒸汽阀的开启,当开口度变大时将更多的蒸汽压力加到发动机上,这样转速就要上升,抵消了最初转速下降的倾向。如果额外的负载去除后,将发生相反的过程,金属球要轻微的上升,蒸汽阀倾向于关闭,抵消了一些转速增加的倾向。
显然,没有这种调节器,速度就会降到底,然而,经过一个合适的调节系统,转速下降会很少。伴随高灵敏度的转速控制系统的出现,也会产生一些人们不希望出现的新问题,即控制量紧随被控制量 ( 转 速 ) ,从而在稳定的转速附近发生不规则的振荡和摆动.所有这种系统的真正的问题是预防过度振荡的同时产生良好的调节作用。调节作用被定义为负载条件下控制量的数值相对空载条件下被控量数值的变化百分比。各种调节器构成了一个重要的、完整的控制系统,他们通常能够保持各自所控对象 ( 对应 ) 的物理量 ( 如加速度 、电压 、液面高度 、湿度等 ) 在负载变化时保持恒定。一个好的调节器有很少的调节量。
1914-1918 年战争促使军队工程师意识到为了赢得战争的胜利需要准确而迅速的使用重型装备 ( 如船只和枪炮 )机动。在 20 世纪 20 年代早期,美国的N.Minorsky从事了这项关于轮船的自动驾驶和在船甲板上自动配置的杰出工作。 在 1934 年术语 “ 随动系统 ” ( 来源于拉丁文 ) 第一次出现在 H.L.Hazen. 的文学作品中。 他将伺服机构定义为一个能量放大装置,在该装置中, 用以驱动输出大量的放大元件由来源于伺服机构的输入与输出之间的偏差来控制。 这种定义能广泛应用于多种多样和各式各样的反馈控制系统。 最近有人认为术语“ 随动系统 ”于 “ 伺服系统 ” 受反馈控制系统的机械位移变量的限制。
在过去的30年里,控制工程通用领域中的一个及其重要的部分“ 随动系统 ” 已经出现,并且被广泛应用于诸如化工、炼油、食品加工、金属加工等各种各样的大规模的工业过程控制当中。在发展的最初阶段,很难想象过程控制理论和调节器理论密切相关。甚至在现在,过程控制系统的完善设计不可能归功于我们对动力学的那些有限的理解。本书介绍的大部分理论中,以随动系统和调节器为例阐述分析方法,然而这种方法通常适用于过程控制系统,那些都是自己分批提出的。
1.可编程序控制器
20世纪60年代,在控制器受到关注以前,机电装置一直是这个年代的流行产品。这些通常被称为继电器的装置被数以千计的系统用来控制许多制造过程和单独的机器。许多这样的继电器被应用于运输工业,更明确的说,应该是应用于汽车工业。这些继电器使用成百上千的金属导线,他们的互相联系将影响控制的解决方案。至少作为一个单位的装置,继电器的性能是基本稳定的。但是,继电器盒通常需要安装300到500甚至更多的继电器,于是可靠性及维修和保养的问题就是不可避免的摆在我们面前。成本问题成为了另一个问题,尽管继电器本身成本很低;但是继电器盒的安装成本很高,每个继电器总的成本,其中包括购买零件、配线和安装工作的成本,大体在30美元到50美元之间不等。更糟糕的事情是,控制面板需要经常不断的更换。对于继电器来说,这是一个昂贵的事实。因为这一更改过程需要大量的劳动在控制面板上重新接线。此外,这些变化有时很少备有证明文件的。这就使得以后的再次维护成为很头痛的事。按照这样考虑,丢弃这个旧的控制面板,同意使用一个合适的新的控制过程方式的相匹配的接线元件的控制面板,也是很常见的事情。这就给这些系统的维护成本增加了不可预知的、潜在的高成本。正如在昂贵的电动车辆生产线上一样。越来越清楚的认识到要使系统更可靠,更容易排除故障,更适合不断变化的控制过程需要,就必须改进控制工程。
在20世纪60年代,出现了第一个新的可编程序控制器。这是第一个“革命性”的系统,这个系统是按照美国汽车制造工业的特定要求开发研制出来的。这些早期的控制器,即可编程序控制器(PLC)是能应用于工厂车间的最早系统。这些控制器在不需要大量重新接线或改变元件的情况下能够做“逻辑”变化,一旦出现问题,他能够很轻易的诊断和修补。
观察可编程序控制器在近15年取得的进步是很有趣的事情。在20世纪60年代末期,早期的产品或许会使很多的人感到惊恐和迷惑不解,例如,维修人员习惯手动工具,那么对于电子仪器的部件和机电设备将会发生什么呢?改进过的计算机代替了这些设备,正如电子器件代替继电器,甚至设计出了工具作为继电器的替代品。我们现在有机会来审视一下前景,回顾过去,可编程序控制器带给制造业是什么呢?
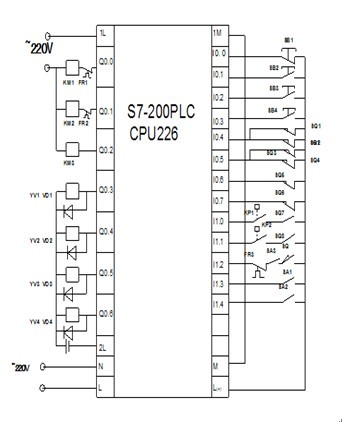
可编程序控制器都包括了基本的功能模块如图示。为了理解控制系统的关系,我们将检查一下每一个模块。首先,我们看一下中心,他是系统的心脏。中心包括微处理器、存储当前控制逻辑的逻辑存储器、存储常变量的变量存储器,中心部分具有控制程序执行和微处理器与存储器提供电力的功能。接着是I/O模块,他的功能是为CPU提供控制的水平信号、模拟信号或是应用于某一个特定应用的“智能” I/O.程序员通常仅需要编写程序,而不需要考虑程序在系统中的运行。他也可以用来发现并修理系统故障,在检查系统故障的确切原因方面是个很有用的设备。在这里提到的设备代表了与I/O连接的各种传感器和调节器,他们是系统的手臂、腿、眼睛与耳朵,其中包括按钮、限制开关、行程开关、光敏元件、热电偶、位置传感器,作为输入的读卡机、标灯、显示设备、发动机、DC和AD驱动器、螺旋线和作为输出的打印机。
2.自动控制的应用
虽然自动控制的应用范围实际上是无限的,但是我们的讨论仅限于现代工业常见的几个例子。
伺服电机
虽然伺服机构本身并不是一种控制的应用,但是这种装置在自动控制系统中却是常用的。伺服机构,或简称“伺服”,是一种闭环控制系统。其中的被控量是机械位置或机械运动。该机构的设计使得输出能迅速而精确的响应输入信号的变化。因此,我们能把伺服机构想象为一种随动装置。
另一种控制输出变化率或输出速度的伺服机构称为速率或速度伺服机构。
过程控制
过程控制是用来表示制造过程中多变量控制的一个术语。化工厂、炼油厂、食品加工厂、鼓风炉、轧钢厂都是自动控制用于生产过程的例子。过程控制就是把有关诸如温度、压力、流量、液位、黏度、密度、成分等这样一些过程变量控制为预期值。
现在过程控制方面的许多工作都包含推广使用数字计算机,以实现过程变量的直接数字控制 ( DDC ) 。在直接数字控制中,计算机是根据设定的数值和过程变量的测算值算出操纵变量值的 。 计算机的判断结果直接送给过程中数字启动器。由于计算机兼有了模拟控制器的作用,所以就不需要这些常规的控制器了。
发 电
电力工业首先关系到能量的转移与分配。发电量可能超过几十万千瓦的现代化大型电厂需要复杂的控制系统来表明许多变量的相互关系,并提供最佳的发电量。发电厂的控制一般被认为是一种过程控制的应用,而且通常有多达100个操纵变量受计算机控制。
自动控制已广泛的用于电力分配。电力系统通常由几个发电厂组成 。 当负责载波时,电力的产生与传输要受到控制,使系统达到运行的最低要求。此外,大多数的大型电力系统都是相互联系的,而且两系统之间的电力流动也受到控制。
数字控制
有许多种加工工序,如镗孔、钻孔、铣削和焊接都必须以很高的精度重复进行。数字控制是一个系统,该系统使用的是称为程序的指令来控制一系列运行。完成这些预期工序的指令被编程代码,并且存储在如穿孔纸带、磁带或穿孔卡片等某个介质上。这些指令通常以数字形式存储,故称为数字控制。指令辨认要用工具、加工方法(如切削速度)及工具运动的轨迹(位置、方向、速度等)等参数。
运 输
为了向现代化城市的各地区提供大量的运输系统,需要大型、复杂的控制系统。目前正在运行的几条自动运输系统中有每隔几分钟的高速火车。要保持稳定的火车流量及提供舒适的加速和停站时的制动,就需要自动控制。
飞机的飞行控制是运输领域中的另一项重要应用。由于系统参数的范围广泛以及控制之间的相互影响,飞行控制已被证明为最发杂的控制应用之一。飞机控制系统实质上常常是自适应的,及其操纵本身要适应于周围环境。例如,一架飞机的性能在低空和高空可能是根本不同的,所以控制系统就必须作为飞行高度的函数进行修正。
船舶转向和颠簸稳定控制系统与飞行控制相似,但是一般需要更大的功率和较低的响应速度。
3.适应性控制系统
适应性控制系统是一种自动调整参数以外补偿过程的相应变化的系统。简而言之,该系统可以“适应”过程的需要。当然,必须有一些作为适应程序依据的准则。为被调量规定一个数值(即设定值)是不够的,因为要满足这一个指标,不仅需要适应性控制还必须另外规定被调量的某种“目标函数”。这是一个决定需要何种特殊形式的适应性控制的函数。
一个给的过程的目标函数可能是被调量的衰减度。因而,实质上有两个回路,一个回路靠被调量操作,另一个回路依赖其衰减度。由于衰减度标志着回路动态增益,因此,这种系统被称为动态适应性系统。
也有可能作为一个过程规定一个静态增益的目标函数。为这种指标而设计的控制系统就是静态适应性系统。
实际上,这两种系统之间几乎不存在相似,以至他们在用一名称“适应性”之下,他们的分类已经引起了许多混淆。
要指出的是,第二个区别并非是目标函数,而是关于如何实现适应性控制的机理问题。如果对于过程有充分的了解,使得参数的调整那个与那些引起过程性质变化的变量有关系,那么适应性控制就可以程序化了。然而,如果必须根据目标函数的测量值来调整参数,则要利用反馈回路来实现适应性控制。这种系统成为适应性控制系统。
动态适应性系统
动态适应性系统的主要功能是给控制回路一个始终如一的稳定度。因此,动态回路增益就是被调量的目标函数,其数值要予以规定。
最容易变化的过程特性是增益。在某些情况下,静态增益会发生变化,这种情况通常称为非线性。另外,一些过程表现出可变化的周期,这就对动态增益产生了影响。但是不论回路的稳定性受到哪种机理的影响,都能通过适当调整调节器的增益来恢复稳定性(这里假定:首先,所希望的衰减度是可以达到的,这就排除了极限环的情况。)
有关可变过程增益的许多情况已经叙述过了。通常,为了补偿这些变化,采取办法是在控制系统中引入一个经过选择的非线性函数。例如,调节阀的特性通常是考虑到为这个目的进行的选择;但是用这种方法所做的补偿可能由于下列原因而不能满足。
(1) 引起增益变化的根源位于回路以外,从而不能从调节器的输入或输出识别这些变化。
(2) 所需要的补偿是几个变量的综合函数。
(3) 过程增益随时间而变化。
静态适应性问题
凡动态适应性系统都是控制回路的动态增益,那么,与他相对应的静态适应性系统就寻求不变的静态过程增益。当然,这意味着静态过程增益是变化的,而且有一个特定值是所期望的。
以控制燃烧系统为例,要活得最高燃烧效率,应调节器燃油、空气比。过量燃油或过量空气都会降低燃烧效率。真正的被调量是燃烧效率。而真正控制量是燃油-空气比。本例中,期望的静态增益是dc/dm=0。该系统应在这样的控制点上运行,即在这一点上燃油-空气比无论是增大还是减小,都会降低燃烧效率。这是静态适应性控制的一种特殊情况,称为“最佳化”。然而,也可以合理的规定一个非零增益。
凡是能满足目标函数的被调量数值是针对该过程的一些主要情况,那么就能够容易的为适应性控制编制出程序。例如,在各种空气流量和温度情况下的最佳燃油-空气比可以是已知的。因此,用于改变控制器设定值的方法来设计控制系统,使燃油-空气比适应于空气流量与温度的变化,作为动态适应性系统例子中的一个流量函数。
4.闭环控制系统
众所周知,闭环控制系统有如下三种基本组成。
1. 误差探测器。这是一个能接受低功率输入信号和输出信号的装置,这些信号可能具有不同的物理性质。为了降低误差,将他们转换成普通的物理量,该设备能减少误差,输出能改正其物理性质的低功率误差信号来驱动控制器。误差信号的探测器通常包括传感器,他们是能把一种实物形态的信号转换成另一种装置。
2. 控制器。他是一个放大装置,接收低功率放大信号和从外部输入的能量,一个控制功率值被调量(正确的物理性质)被提供给了输出元件。
3. 输出元件。提供与控制器输出信号一致的正确物理性质能量加载。
另外一些装置,如齿轮箱和“补偿”装置有控制系统的特性,但是这些通常被认为构成一个或其他元件的一部分。



