





















两指夹持式气动机械手(PLC论文代写)
摘 要:现在越来越多人广泛使用机械手。我用冲床上下材料,本文介绍了它的组成和分类、自由度和协调类型,气动技术的特点,PLC控制和国内外发展现状的特点,机械手的总体设计,确定机械手的坐标类型和自由度,参数,机械手手臂结构的设计,机械手的气动系统设计,地图机械手气动系统的工作原理。操纵者利用可编程序控制器控制,PLC的,然后选择合适的模型, 然后可根据机械手的工作流程来编程序控制,画出机械手工作顺序功能图和梯形图,并编制控制编程。
关键词:机械设计, 冲床上下料,气动,PLC
Two is a clamping type pneumatic manipulator (PLC)
Abstract:Now more and more widely used manipulator. I am up and down with a punch press materials, this paper introduces its composition And classification, freedom and coordination type, the characteristics of pneumatic technology, PLC control and the characteristics The present situation of the development of both at home and abroad, the overall design of the manipulator, determine the coordinates of the manipulator type and degree of freedom, the parameters, the design of the manipulator arm structure, pneumatic system design of the manipulator, map the working principle of pneumatic manipulator system. Manipulator using programmable controller to control, PLC, and then select the appropriate model, and then, according to the working The process of manipulator PLC control scheme, draw the manipulator work sequence function diagram and ladder diagram, programming and document control.
Key words: Design of manipulator; Punch blanking; Pneumatic; PLC
目录
第一章 绪论 1
1.1 选题背景 1
1.2 设计目的 1
1.3 发展现状和趋势 2
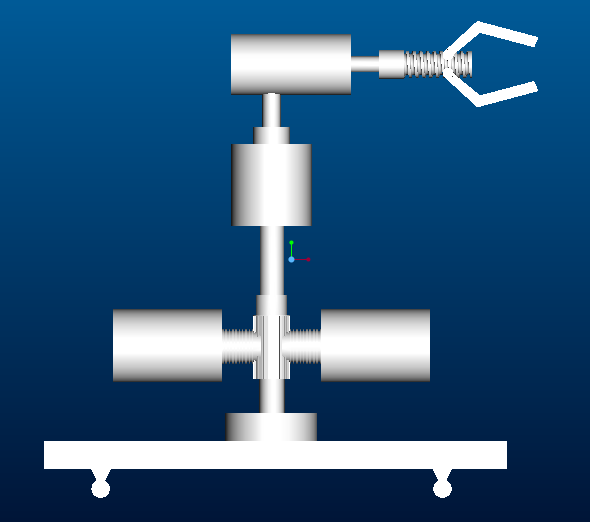
1.4 机械手的系统工作原理及组成 3
第二章 机械手各部件的设计 4
2.1 机械手的总体设计 4
2.1.1 机械手总体结构的类型 4
2.2 机械手手爪结构设计 4
2.2.1 设计要求 5
2.2.2 驱动方式 5
2.2.3 典型结构 5
2.3 机械手手臂结构的设计 6
2.4 机械手腰座结构的设计 6
2.4.1 腰座结构的设计要求 6
2.4.2 具体设计方案 6
2.5 机械手驱动系统设计 7
2.5.1 常用驱动系统及其特点 7
2.5.2 具体设计方案 7
2.6 机械手手臂的平衡机构设计 8
2.6.1 平衡机构的形式 8
2.6.2 具体设计方案 8
第三章 手部结构设计 9
3.1 手指的形状 9
3.2 设计时考虑的几个问题 10
3.3 手部夹紧气缸的设计 10
3.3.1 手部驱动力计算 10
3.3.2 气缸的直径 13
3.3.3 缸筒壁厚的设计 15
第四章 手臂结构设计 15
4.1 手臂伸缩 16
4.1.1 结构设计 16
4.1.2 导向装置 16
4.1.3 手臂伸缩驱动力的计算 16
4.2 手臂升降和回转部分的结构设计 19
4.3 手臂伸缩气缸的设计 19
4.3.1 驱动力计算 20
4.3.2 气缸的直径 20
4.3.3 活塞杆直径的计算 21
4.3.4 缸筒壁厚计算 21
第五章 主要元器件的选择及控制原理 22
5.1气动三联件 22
5.1.1 换向阀 23
5.1.2 节流阀 23
5.2 气源系统的设计 25
5.3 气压传动系统工作原理图 25
5.4 机械手运行顺序及电气控制 26
第六章 机械手的PLC控制设计 27
6.1 可编程序控制器的选择及工作过程 27
6.1.1 可编程序控制器的选择 27
6.1.2 可编程序控制器的工作过程 27
6.2.机械手可编程序控制器控制方案 27
6.2.1 系统简介 27
6.2.2 工作流程 28
6.2.3 I/0分配 28
6.2.4 机械手工作时序图 29
6.2.5 梯形图设计 31
第七章 结论 35
致谢 36
参考文献 37
附录
第一章 绪论
1.1选题背景
因为工业自动化改进,提高工作效率。单单靠我们的手工劳作已经完成不了工业自动化的要求,所以我们必须利用先进设备生产自动化机器来代替人类的劳动,满足工业自动化的需求。机械手是一种重要的产品在其发展的过程中,它不仅可以提高劳动生产率,我们可以代替强度高、危险和重复无聊的工作,从而减少人工劳动强度。机械厂机械手使用越来越广泛,它可用于组装的零件,加工工件搬运、装卸还可以代替我们人干一些危险的动作,还可以节省我们的工作时间,人工,提高效率。
我们现在的液压传动存在以下几个缺点:
(1)液压传动在工作时有较多的能量损失如摩擦损失、泄露损失等。
(2)工作时受温度变化影响较大。油温变化时,液体粘度变化,引起运动特性变化。
(3)因液压脉动和液体中混入空气,很容易产生噪声。
(4)为了减少泄漏,液压元件的制造工艺水平要求较高,故价格较高;且使用
维护需要较高技术水平。
看了以上缺点我拟采用了气压传动 :
(1)优点一是介质提取和处理方便。 介质很好找,又好处理,而且还不污染,干净环保。
(2)优点二是其次它的损失很小,泄漏也小,即使泄漏了也不污染,
(3)优点三是动作迅速,反应灵敏。因为气的速度比油液要快的多得多‘控制还挺方便。
(4) 优点四是能源可储存。压缩空气可存贮在储气罐中,因此,发生突然断电等情况时,机器及其工艺流程不致突然中断。
(5) 成本低廉。由于气动系统工作压力较低,因此降低了气动元、辅件的材质和加工精度要求,制造容易,成本较低。
参考文献
[1] 隋明阳. 机械设计基础. 北京:机械工业出版社,2008
[2] 许谬、王淑英. 电气控制与PLC应用. 北京:机械工业出版社,2009
[3] 詹友刚. Pro/ENGINEER机械设计教程. 北京:机械工业出版社,2009
[4] 李建勇. 机电一体化技术. 北京:科学出版社,2004
[5] 刘建雄、韩建华. 物流自动化搬运机械手机电系统研究. 北京:高等教育出版社,2003
[6] 孙兵、赵斌、施永康. 物料搬运机械手的研制. 杭州:浙江大学出版社,2005
[7] 施永康. 基于PLC的机械手混合驱动控制. 杭州:浙江大学出版社,2005
[8] 徐灏. 机械设计手册. 北京:机械工业出版社,2000
[9] 邱永成. 机械基础. 北京:中国农业出版社,2004
[10] 圣山颖. 现代工程制图. 北京:中国农业出版社,2004
[11] 王明海. 机械制造技术. 北京:中国农业出版社,2004



