





基于PLC控制的抓取料机器人设计
摘要:随着如今社会科技的飞速进步,我们的生活越来越好也越来越趋向于自动化。现在的工厂大多是自动生产线,一条大型生产线只需几个人进行智能控制就能完成自动生产、安装与运输,与之前需要大量的工人来完成生产、安装和运输,更加经济、安全、省时。自动抓取料机器人在工业中,不仅能够带来巨大的经济效益,而且也是行业发展的趋势。本课题简要阐述所需控制要求和基本方案,对PLC控制机器手进行分析,并按照控制要求,确定了大体的控制方案,并重点研究PLC控制机器手的程序编写。最后,简要说明了在2017年“全国智能制造大赛”上的应用情况。
关键词:PLC;机器手;
Grasp and Reclaimer robot based on PLC
control
Abstract:With the progress of social science and technology, our life is getting better and more intelligent. Now, most of the factories are automatic production lines. A large production line needs only a few people to carry out intelligent control to complete automatic production, installation and transportation. It needs a large number of workers to complete production, installation and transportation, more economical, safe and time-saving. The design of an automatic grabbing robot can not only bring huge economic benefits, but also the development trend of the industry. This topic briefly describes the required control requirements and basic schemes, analyzes the PLC control machine hand,according to the control requirements, the general control scheme is determined.and focuses on the program writing of the PLC control machine hand. Finally, the application of the national intelligent manufacturing competition in 2017 is briefly introduced.
Keywords:PLC;robot;
目录
一、引言 2
1.1课题来源及研究意义 2
1.2本文的研究内容 3
二、 PLC控制机器手的总体构成 3
2.1 机器手概述 3
2.1.1 机器手的诞生 4
2.1.2 机器手的发展前景 4
2.2 PLC概述 4
2.2.1 PLC的历史 4
2.2.2 PLC的发展 4
2.2.3 PLC的基本结构 5
2.3 RFID 6
2.3.1 RFID简介 6
2.3.2 RFID组成 6
2.3.3 RFID工作原理 6
三、PLC控制机器人系统搭建 7
3.1 PLC控制系统 7
3.2 机器人控制系统 8
3.2.1 机器人控制系统硬件设计 8
3.2.2 电控柜面板按钮功能 8
3.2.3 电控柜元件功能介绍 9
3.2.4 电控柜元件介绍 10
3.2.5 电控柜与机器人本体的连接 15
3.2.6 机器人机械组成 16
3.4 元器件清单 19
3.4 通信介绍 19
3.4 系统软件设计 22
3.4.1 系统控制流程图 22
3.4.2 控制系统外部接线图 23
3.4.3 I/O变量表 23
3.4.4 PLC软件编程设计 24
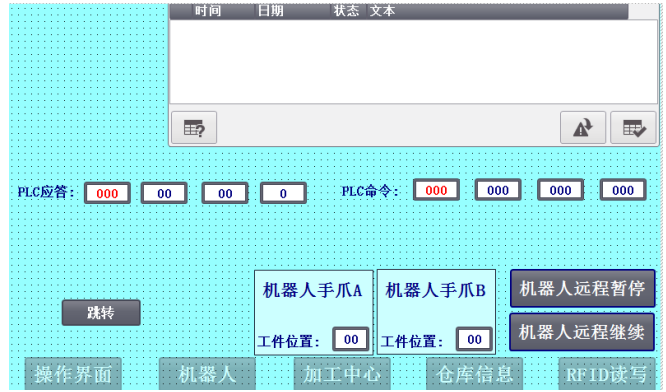
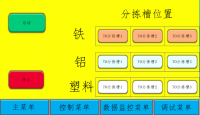
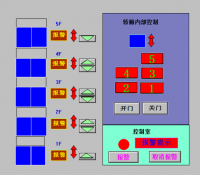
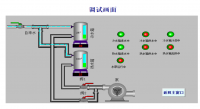
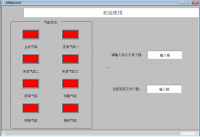
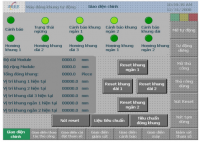
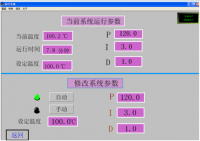
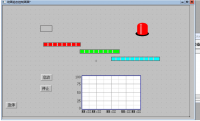
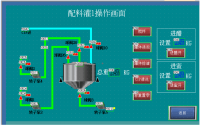
3.4.5 触摸屏 27
四、总结 29
五、附录 30
5.1 附录一 30
5.2 附录二 33
六、主要参考文献 36
一、引言
1.1课题来源及研究意义
机器人是我们在利用机械力替代人力劳动的一个里程碑。在发达国家,机器人自动生产线已经成为自动化产线的主流,现今汽车、手机等制造行业已经大量使用工业自动生产线来代替人力产线,用来提高产品质量,提高生产效率,同时也可以减少大量的工作事故。从近几十年全球许多国家的机器人使用情况来看,机器人的普及对企业的来说是提高工作生产效率,推动发展的有效手段。
本控制系统来源于学院机器人技术创新团队项目。随着时代的自动化发展,机器人在工业领域的使用会越来越多、地位也会越来越高,自动化抓取在制造业和搬运业等方面的运用也会越来越广泛。
1.2本文的研究内容
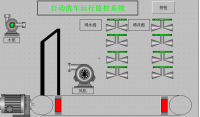
本课题是以2017年“全国智能制造技术应用大赛”为依据设计的,以西门子S7—1200PLC为基础开发的抓取料系统。根据项目要求,该系统要可以实现机器人能准确从仓库指定位置取出,放下物料、RFID扫描功能。
根据要求,本系统的设计方面主要有以下几个:
(1).PLC控制机器手的编程
(2)RFID应用分析
(3).控制机器手的硬件构成
(4).控制电路的设计
二、PLC控制机器手的总体构成
2.1 机器手概述
2.1.1 机器手的诞生
日本是现今机器手王国,是机器手的最大制造国也是最大应用国。但实际上机器手的诞生地是美国。在1959年美国的一家汽车公司,研发了第一台机器手,他们可以让机器手代替工人做一些复杂重复且危险的工作,而且也不需要报酬和休息,只需要付出很少代价就能得到很大的效益,同时也降低了工业事故。
参考文献
[1] 张晓娟.工厂电气控制设备.北京:电子工业出版社,2012,1
[2] 郭琼.PLC应用技术.北京:机械工业出版社,2009,6
[3] 华莹,董婷.高等学校毕业设计(论文)指导教程/电气工程类专业[M].北京:中国水利水电出版社,2015
[4] 奚茂龙,陆荣.小型综合自动化系统集成[M].西安:西安电子科技大学出版社,2014,9
[5] 崔坚.SIMATIC S7-1200与TIA博途软件使用指南.北京:机械工业出版社,2016
[6] 朱文杰.S7-1200PLC编程设计与应用.北京:机械工业出版社,2017,1
[7] 张硕.TIA博途软件与S7-1200/1500PLC应用详解.北京:电子工业出版社,2017,2




