




基于STM32微控制器的无人机飞控系统设计
【摘要】无人机种类繁多,用途广阔,控制灵活等特点,在军用民用上发挥着其重要的价值,无人机飞行控制系统设计是无人机实现平稳飞行的重要核心,飞控系统的好坏决定了无人机性能优劣。因此研制无人机良好的飞控系统对于无人机来说具有很大的价值。
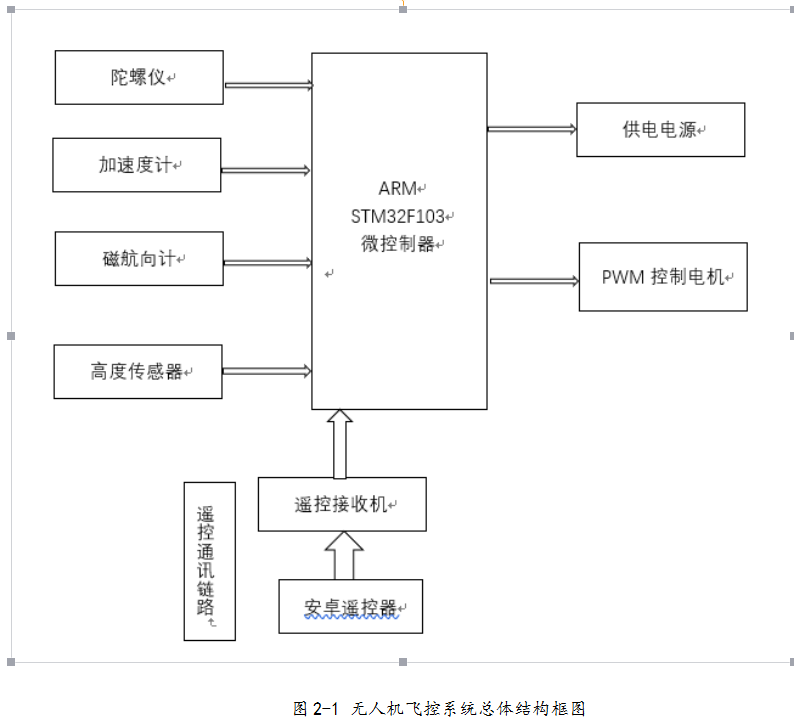
本文首先对无人机研究意义,国内外发展状况进行简单论述,结合情况及要求,得出飞控系统各模块组成并且列出总体框架图来。微控制器选用ARM公司的STM32微处理器,它具有性能高,成本低,功耗小的特点,是理想的的控制芯片,姿态传感器选用MPU6050,它内置了一个三轴陀螺仪和一个三轴加速度计。磁力计选用霍尼韦尔HMC5883L磁阻传感器,具有高灵敏度和线性高精度的特点。高度传感器选用BMP085数字压力传感器,通过测量气压值,换算求得当前高度值。通过PWM脉宽调制完成对电机的控制。选用蓝牙通信方式,控制飞行器飞行。
硬件完成后,继续进行软件设计,首先采集传感器模块数据,编写流程,程序读取数据,接着采用卡尔曼滤波方法处理对应数据并估计更新。另外安卓遥控器通过蓝牙模块接受数据,读取进行相对应操作。
系统调试时,对软件,硬件按模块依次调试。
关键词:无人机,飞控系统,STM32微控制器
“Abstract”UAV a wide range of uses, flexible control and other characteristics, in military civilian play its important value, UAV flight control system design is unmanned aircraft to achieve a smooth flight of the important core, flight control system to determine the quality of the UAV performance. Therefore, it is of great value for UAV to develop a good flight control system for UAV.
In this paper, the significance of unmanned aerial vehicle research, domestic and foreign development of a simple discussion, combined with the situation and requirements, the flight control system modules and the overall framework. The microcontroller chooses arm company's STM32 microprocessor, it has the characteristic of high performance, low cost, small power consumption, is the ideal control chip, the attitude sensor chooses MPU6050, it has built a three-axis gyroscope and a triaxial accelerometer. The magnetometer selects Honeywell HMC5883L magnetoresistive sensor, which has the characteristics of high sensitivity and high precision. The height sensor chooses the BMP085 digital pressure transducer, and obtains the current height value by measuring the pressure value. The PWM pulse width modulation is used to control the motor.
The use of Bluetooth communication methods to control the flight of aircraft. After the hardware is finished, the software is designed, the data of the sensor module is collected, the process is compiled, the program reads the data, then the Kalman filtering method is used to process the corresponding data and estimate the update. In addition to the Android remote control through the Bluetooth module to accept data, read the corresponding operation.
When debugging the system, the software and hardware are debugged in turn.
一 绪论
1.1无人机的研究意义
如今,随着信息技术和电子技术的飞速发展,航空领域也在此带动下得到了快速的发展,无人机也成为了各国研究的热点。
无人机种类繁多,不同无人机可以完成不同的任务,可以用于军事,也可以用于民用。在军用领域可作为侦察机侦察敌方军队部署状况,行动路线,以及武器装备配置情况,也可以作为靶机,测试地面火炮对空射击精度的优良,还可以携带空对地导弹实现对地面指定目标的打击。在民用上,可以实现交通的监拍,自然灾害发生后的灾后经济损失评估,以及对国家边境进行巡逻监控等作用。因此无人机在未来将占有很重要的地位,且具有非常重要的研究意义。
1.2无人机的国内外研究状况
1.2.1国内无人机发展现状
我国对无人机的研究和许多发达国家相比要晚很多年,改革开放以后,我国终于可以有能力自主研制无人侦察机,到80年代初,部队中终于有了无人侦察机机。改革开放以来,无人机在民用领域探索就没有停止过,在各行各界相关人员经过多年的日夜努力,从无到有逐步成为我国经济发展的一环。至今年,我国拥有三百多家从事无人机行业的单位,有一百六十家无人机单位能自主研发、制造、销售。据相关研究报告表明,超过一百多种无人机已经投入各个不同领域使用,微型无人机技术得到进一步完善,军用无人机多次成功的试射空对地导弹。我国在2014年无人机销售量2万架左右。未来几年仍会保持百分之五十以上的增长率, 2014年,我国民用无人机销售总额已经超过40亿元。至2020年,我国无人机销售额预计超过200亿元。从2002年值2015年7月,国内与无人机相关的专利申请共有15 245件,其中,新型专利占比37.48%,发明型技术专利占57.39%,外观专利占比5.13%。
1.2.2国外无人机发展现状
美国国家航天局的无人机引用中心天天展开这对无人机的研究,这段时间它同大气局(NOAA)合作,来开展无人机实现因全球变暖而导致各种环境问题的研究。早在2007年,美国发生森林大火,美国宇航局使用“伊哈纳(Ikhana)”无人机来实现灭火,通过拍下来的视频来估测造成的经济损失。“伊哈纳”无人机是由军用无人机改造而成,这种无人机要比军用无人机小很多,但它能飞行的高度一点都不比军用无人机飞行高度低。其主要功能是对环境的监测。
在美国,无人机已在各行各业中发挥着其巨大的作用。NASA将一些原本用于战场高空无人机通过改装,来实现对热带风暴龙卷风等自然灾害的研究和监视,来减少经济损失和人员伤亡。另外,在美国,无人机还可以实现土地管理和保护野生动物的监测等领域
以色列对于无人机的研究走在全世界领先,它也有专门研究部门对民用无人机实现研究,埃尔比特系统公的赫尔穆斯450无人机最先完成设定程序并在2007年率先得到无人机民用证书。现在,以色列,在无人机方面依然优势明显,其军工业的能力强有必定关系。
A-03 Nart是由俄罗斯Antigrad Air公司研发的,该无人机可以实现对边境的查询,防止一些不法分子越境,可以监控主干道车流量以及违章车辆的拍摄。该机和伊哈纳比起来要小许多,其翼展只有伊哈纳一半,而且和伊哈纳比起来载重也小很多,但是它的续航时间长,飞行速度快。监控站可以在1000千米之外实现远程监控。可以在普通机场用道上上起飞,也可以在发射架上起飞。装载各种系统可以为很多工作岗位运用。
日本目前是农用无人机喷药第一大国,通过无人机实现对农作物的喷药,不仅轻松方便,而且效率很高,因此深受日本农民的青睐,预计在未来几年,农用无人机在日本的无人机销售领域依然领先其它行业的无人机使用。
目前民用无人机的发展方向有警用、巡线、农林植保、航拍、快递和科研。由于市场需求越来越不同,无人机今后也一定在新的领域得到应用,在未来,无人机不管在民用还是军用,都会像潮流一样飞速更新。
1.3本文主要研究内容
本文主要包括七章内容:
第一章是绪论部分,主要介绍无人机研究的意义、国内外研究现状以及本文主要研究内容。
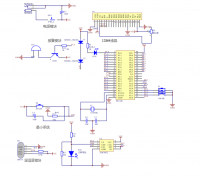
第二章给出无人机飞控系统各模块设计的要求以及总体设计的框架及框架图,为后文研究提供基础。
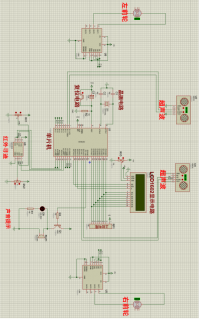
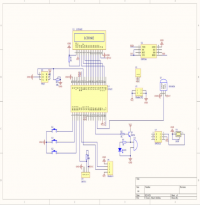
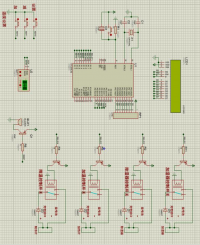
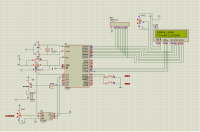
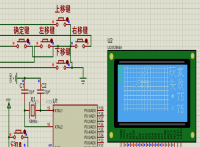
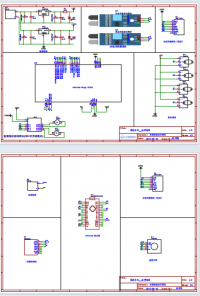
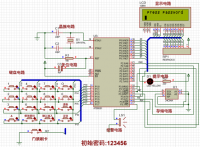
第三章对飞控系统各模块的硬件进行设计。
第四章完成飞控系统各模块的软件设计。
第五章飞行器姿态调试及结果。
第六章总结与展望
目录
一 绪论 4
1.1无人机的研究意义 4
1.2无人机的国内外研究状况 4
1.2.1国内无人机发展现状 4
1.2.2国外无人机发展现状 4
1.3本文主要研究内容 6
第二章 无人机飞控系统总体设计 6
2.1无人机的设计要求 6
2.2飞行控制系统总体组成及框架图 7
第三章 飞控系统硬件设计 8
3.1 STM32F103微控制器 8
3.2传感器模块设计 9
3.2.1加速度计 9
3.2.2磁力计 11
3.2.3高度传感器 14
3.3PWM模块 16
3.4电源系统设计 19
3.5蓝牙/安卓遥控硬件设计 19
第四章 无人机飞控系统的软件设计 21
4.1软件开发环境简介 21
4.2高度测量模块数据采集 21
4.3磁航向传感器地址采集 24
4.4传感器的数据处理 28
4.5安卓遥控器开发 31
第五章 飞控系统调试 34
5.1飞行姿态调试及结果 34
第六章 总结与展望 35
致谢 35
参考文献 37
附录1主程序 37
参考文献
【1】黄和悦.IY四轴飞行器基于MSP430F5系列单片机与Android.北京:电子工业出版社,2015。
【2】林庆峰,谌利.奚海蛟.多旋翼无人机飞行器嵌入式飞控开发指南.北京:清华大学出版社,2017。
【3】于坤林,陈文贵.无人机结构与系统.西安:西北工业大学出版社,2016。
【4】郝英好,严晓芳,等.无人机发张概览.北京:国防工业出版社,2017。
【5】吴勇,罗国富,刘旭辉,周定江,肖松,杨松和.四轴飞行器DIY——基于STM32微控制器.北京:北京航空航天大学出版社,2016.



