





















基于PLC的AGV智能车的系统设计
摘要:AGV智能车的中央控制系统的作用是让小车能够沿着预先铺设在地面上的反射带和黏在地上的地标完成循迹运动、地标识别、避障等功能。小车的中央控制器通过接收一系列传感器产生的输入信号,通过PLC 内部按照课题要求编写的程序完成对小车运动单元两轮电机的正反转控制。实现小车的前进、后退、停止、寻线、路径判断、避障等功能。一般的 AGV小车大多采用以单片机作为核心的控制系统,当工厂需要根据工作的环境而改变AGV小车的需求时,小车想要进行完善和改变就变得很不方便,基本上想要修改就需要换点部分硬件。所以,综上可得,考虑小车的通用性高、性价比高、接口简单、编程简单等方面的优点,PLC就可以作为更好的选择。
经过一系列的调试,本文所介绍的AGV智能车能够准确又平稳地在预设的路径和反射带上行驶,具有良好的平稳性和准确性;小车的前进、后退、转弯、避障等方面都能较好的实现。在测试过程中,对于障碍物的检测和躲避功能能够正常实现。本文所设计的AGV智能车的控制系统优点在于可以根据工厂不同的需求进行相应的改变,从而满足各种需求。基本实现了一开始的设计需求并且达到了预期的效果。
关键词:磁导引,AGV,控制系统,PLC
Design of AGV Intelligent Vehicle System Based on PLC
Abstract:The central control system of AGV smart car is to enable the car to follow the reflective belt laid on the ground in advance and stick to the landmark on the ground to complete the tracking movement, landmark identification, obstacle avoidance and other functions. Through the control of the core PLC, the speed control of the two-wheel motor of the car's motion unit is completed according to the required pre-programmed procedures, so as to realize the start and stop of the car. Tracking, acceleration and deceleration, path judgment, derailment control. Moreover, when the factory needs to change the requirements of AGV car according to the working environment, it becomes very inconvenient for the car to be improved and changed. Basically, if you want to modify, you need to change some hardware. Therefore, in summary, considering the advantages of high versatility, high cost performance, simple interface, simple programming and so on, PLC can be a better choice.
After a series of debugging, the AGV intelligent vehicle introduced in this paper can run accurately and smoothly on the preset path and reflection belt, and has good stability and accuracy. The functions of acceleration, deceleration, turning, bifurcation, obstacle avoidance and acoustooptic control of the trolley can be well realized. During the experiment, In the process of testing, the function of obstacle detection and avoidance can be realized normally. The control system of AGV intelligent vehicle designed in this paper has the advantage that it can be changed according to the different needs of the factory, so as to meet various needs. Basically realized the initial design requirements and achieved the desired results.
Key words: magnetic guidance, AGV, control system, PLC
第一章 绪论 1
1.1 课题的意义及来源 1
1.2 国内外AGV智能车的发展概括 2
1.2.1 国外AGV智能车的发展历程和现状 2
1.2.2 国内AGV智能车的发展历程和现状 3
1.3 本课程主要设计内容 3
第二章 总体方案设计 3
2.1 AGV智能车系统的组成 3
2.2 控制系统设计 4
2.3 小车导引方式选择 5
2.4 驱动方案的制定 6
2.5 供电系统设计 7
2.6 避障方式设计 7
第三章 AGV智能车的机械结构 8
3.1 车架主体结构 8
3.2 安全保护装置 9
3.3 轴的设计 10
3.4 齿轮的设计和选取 10
第四章 AGV智能车控制系统设计 11
4.1 硬件系统设计 11
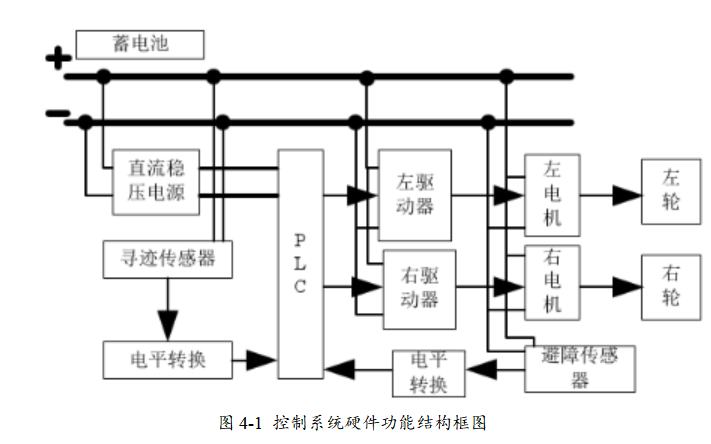
4.1.1 控制系统硬件结构框图 12
4.1.2 元器件的选型 12
4.1.2.1 PLC型号的选取 12
4.1.2.2 磁带导引条的选取 13
4.1.2.3 磁导航传感器的选取 13
4.1.2.4 电池的选取 15
4.1.3 主电路图设计 16
4.1.4 外部接线图设计 16
4.1.5 元器件清单 17
4.2 软件系统设计 17
4.2.1 I/O地址分配 18
4.2.2 控制系统流程图 18
4.2.3 梯形图 20
第五章 系统调试 25
5.1 小车检测障碍物调试 25
5.2 小车寻线启动调试 26
第六章 总结与展望 26
致谢 27
参考文献 27
毕业设计附录 28
第一章 绪论
1.1 课题的意义及来源
AGV可以称为自动导引小车,它用电池作为动力,装有导向装置的无人驾驶的自动导引智能车,它可以保证无人驾驶的情况下沿着预设的路径进行自动行驶。它的主要特征有小车的编程、启停选择装置、安全保护以及各种移载功能,并且能在监控下,按照指令自动沿着预设的路径行驶,然后到达目的地。AGV的另一个特点是柔性好,自动化程度和智能化水平都很高,AGV的行驶路径可以根据工厂的要求和环境的改变而灵活改变,并且运行路径改变相较于传统的输送带相比费用也要便宜许多。AGV用蓄电池来提供动力,运行过程中没有噪声和污染,可以在很多工作环境干净清洁的场所使用。
随着AGV技术的不断发展,AGV新产品就不断的开发出来,从而显著地提高了生产自动化程度和生产效率。
出于现代化生产观念日益受到重视,对生产线运行、物流系统的柔性要求越来越高。在产品换型、多种产品混合生产线运行、调整产量、重新组合生产线等方面,AGV必将得到迅速发展和普及应用,这不仅是现代化工业迅速发展的需要,更主要是由AGV本身所独具的优越性决定的。
在制造业的生产线中,AGV能高效、准确、灵活地完成物料的搬运任务。并且可出多台AGV组成柔性的物流搬运系统,搬运路线可以随着生产I艺流程的调整而及时调整,使一条生产线上能够制造出十几种产品,大大提高了生产的柔性和企业的竞争力。1974 年瑞典的Volvo Kalmar轿车装配厂为了提高运输系统的灵活性,采用基于AGVS为载运工具的自动轿车装配线,该装配线由多台可装载轿车车体的AGVS组成,采用该装配线后,装配时间减少了20%,装配故障减少39%,投资回收时间减少57%,劳动力减少了5%。目前,AGV在世界的主要汽车厂,如通用、丰田、克莱斯勒、大众等汽车厂的制造和装配线上得到了普遍的应用。
本研究课题以企业车间发动机分装系统改造项目作为依托。由于总装线增加新车型,出于产能提升的要求,项目将对发动机分装阵地进行改造。改造内容之一就是增加前悬置分装线,该分装线目前为手推小车形式,要求更改为磁导向电动分装小车,数量4台。我们将依据企业自身的要求,以现有的传感检测及微控制技术为基础,设计一个磁导式AGV控制系统,并结合车体本身的结构设计,开发出完整的AGV小车,用于前悬置分装生产线上,以提高企业的生产效率,并节约生产成本。
1.2 国内外AGV智能车的发展概括
AGV扮演物料运输的角色已经40多年了。第一辆AGV诞生于1953年,它是由一辆牵引式拖拉机改造而成的,带有车兜,在一间杂货仓库中沿着布置在空中的导线运输货物。从20世纪80年代以来,自动导引运输车(AGV)系统已经发展成为生产物流系统中最大的专业分支之一,并出现产业化发展的趋势,成为现代化企业自动化装备不可缺少的重要组成部分。在欧、美等发达国家,发展最为迅速,应用最为广泛;在亚洲的日本和韩国,也得到迅猛的发展和应用,尤其是在日本,产品规格、品种、技术水平、装备数量及自动化程度等方面较为丰富,已经达到标准化、系列化、流水线生产的程度。在我国,随着物流系统的迅速发展,AGV的应用范围也在不断扩展,如何能够开发出能够满足用户各方面需求(功能、价格、质量)的AGV系统技术是未来我们必须面对的现实问题。
1.2.1 国外AGV智能车的发展历程和现状
世界上第一台AGV是由美国Barrett电子公司于20世纪50年代初开发成功的,它是一种牵引式小车系统,可十分方便地与其他物流系统自动连接,显著地提高劳动生产率,极大地提高了装卸搬运的自动化程度。1954年英国最早研制了电磁感应导向的AGV,由于它的显著特点,迅速得到了应用和推广。
20世纪80年代末,国外的AGV达到发展的成熟阶段,此时美国的AGV生产厂商从1983年的23家剧增至1985年的74家。1984年,美国通用汽车公司完成了它的第一个柔性装配系统(FAS),从此该公司就成为当时AGV的最大用户。1986年已达1407台(包括牵引式小车、叉车和单兀装卸小车),1987年又新增加1662台。美国各公司在欧洲技术的基础上将AGV发展到更为先进的水平,他们采用更先进的计算机控制系统,运输量更大,移载的时间更短,小车和控制器的可靠性更高。
随着目前技术的发展,AGV技术水平在不断地提高。AGV的市场正向二极化方向发展,一个是向自动化程度高的高档市场发展;另一个是向物流、车间等以人为接点的低档市场发展。
1.2.2 国内AGV智能车的发展历程和现状
我国AGV发展历程较短,但一直以来不断加大在这一领域的投入,以改变我国AGV长期依赖进口的局面。经过不懈地努力终于取得了一定的成效,北京起重运输机械研究所、清华大学、中国邮政科学院邮政科学研究规划院、中国科学院沈阳自动化所、大连组合机床研究所、国防科技大学和华东工学院都在进行不同类型的AGV的研制并小批投入生产。 在国内AGV的技术来源有两种模式:一种是引进技术;一种是自有知识产权的技术。两种模式目前都涵盖AGV的所有技术,技术水平并无多大差别。引进技术主要是瑞典NDC的AGV控制系统技术,据了解NDC目前在国内现有3家合作伙伴。
随着我国经济的不断发展,AGV的应用领域和市场正变得越来越大。
1.3 本课程主要设计内容
本课程的研究设计主要包括以下几个方面:
(1)AGV的总体结构设计;
(2)控制系统的设计;
(3)导引方式的选择;
(4)驱动方案的制定;
(5)供电系统设计;
(6)避障方式设计。
按以上六个方面,分析问题,逐个解决。然后进行系统调试。
第二章 总体方案设计
2.1 AGV智能车系统的组成
AGV是Automated Guided Vehicle的缩写,意即“自动导引运输车”。AGV是装备有电磁或光学等自动导引装置,能够沿着给定的导引路径行驶,具有安全保护以及各种移载功能的运输车。它以电池为动力,装有非接触导向装置的无人驾驶自动车辆。它的主要功能表现为能在计算机监控下,按照路径规划和作业要求,使小车较为精确地行走并停靠到指定位置,完成一系列作业要求。
参考文献
[1] 赵海兰.基于单片机的红外遥控智能小车的设计[J].无线互联技术,2011年3期.
[2] 黄杰.基于模糊控制的智能车辆设计[J].中国科技信息,2010年20期.
[3] 杨刚.电子系统设计与实践[J].电子工业出版社,2009.3.
[4] 陈刚.机电一体化技术.清华大学出版社,2010年3月.
[5] 廖常初.PLC编程及应用.机械工业出版社,2008年1月
[6] 吴黎明.数字控制技术.科学出版社,2009年1月.
[7] 李翰霖等.智能小车研究与设计[J].科技致富向导,2011年26期.
[8] 刘南平.电子产品设计与实践[J].科学出版社,2008
毕业设计附录
1.车架结构图
2.锥齿轮结构图
2.主电路图
3.外部接线图
4.控制系统流程图
5.PLC程序梯形图



