





















基于视觉传感技术的半主动悬架控制方法
摘要:针对车辆半主动悬架调节滞后性的问题,提出了一种基于视觉传感技术的悬架调控方法。首先,创建了基于视频传感的汽车二自由度1/4悬架模型,揭示了路面不平度与汽车预振动量之间的变换规律,从理论上对该方法进行可行性判断。然后,采用摄像头预先扫描车辆前方的路面状况,运用基于图像灰度阈值的分割方法识别并规划不平路面区域边缘,在此基础上,构思了一种基于单目视觉的几何结构特征方法对不平区域深度计算,以获取路面不平度参数,对半主动悬架的阻尼进行预调控,使悬架提前适应不同路面。最后,设计了悬架的软硬件结构,对装有视觉传感的半主动悬架与其他形式的悬架开展了单凸块及路面试验对比。试验表明基于视觉传感的半主动悬架试验振动峰值比装有加速度传感器式半主动悬架振动峰值可减少42.3%,能够有效解决半主动悬架调控的滞后性问题,验证了所提方法的优越性。
关键词:汽车;半主动悬架; 控制;视觉传感;图像处理
Control method of semi-active suspension based on vision sensing technology
Abstract: Aiming at the problem of vehicle semi-active suspension regulation hysteresis, a method of suspension regulation based on vision sensing technology is proposed. Firstly, a two degree of freedom 1 / 4 suspension model based on video sensor is established, and the transformation law between road roughness and vehicle pre vibration momentum is revealed. Then, the camera is used to scan the road condition in front of the vehicle in advance, and the edge of the uneven road area is identified and planned by the segmentation method based on the gray level threshold of the image. On this basis, a geometric structure feature method based on monocular vision is conceived to calculate the depth of the uneven area, so as to obtain the road roughness parameters, pre regulate the damping of the semi-active suspension, and make the suspension Adapt to different roads in advance. Finally, the software and hardware structure of the suspension is designed, and the single bump and road test comparison between the semi-active suspension with visual sensor and other suspension forms are carried out. The experimental results show that the vibration peak value of the semi-active suspension based on visual sensor can be reduced by 42.3% compared with that of the semi-active suspension with acceleration sensor, which can effectively solve the hysteresis problem of the semi-active suspension control, and verify the superiority of the proposed method.
Key words: automobile, semi-active suspension, control, vision sensing, image processing
目录
第一章 绪论 1
1.1研究背景 1
1.2存在的问题 1
1.3本文的创新点 2
第二章 视频悬架总成及可行性评价数学模型 2
2.1视觉半主动悬架模型的建立 2
2.2 视频传感半主动悬架总成 4
第三章 路面不平度识别与计算 5
3.1不平路面图像识别与分割 5
3.2路面不平度的计算与预判方法 6
3.3视频悬架控制方法 9
第四章 视频悬架软硬件设计 10
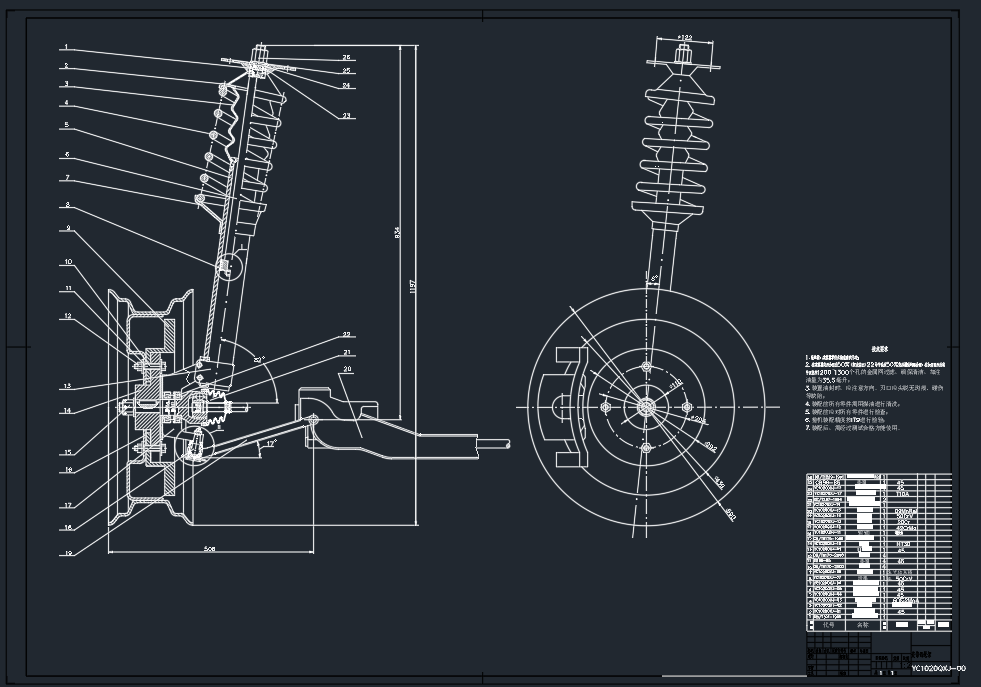
4.1 半主动悬架机械结构的设计 10
4.1.1悬架整体构成设计 10
4.1.2减震器的机械设计 12
4.1.3弹性元件的机械设计 13
4.2 视频半主动悬架电路硬件的设计 14
4.3 视频半主动悬架软件的设计 20
第五章 悬架对比试验 22
5.1悬架单凸块对比试验 22
5.2 不同路面加速度对比试验 24
第六章 结论与展望 25
致谢…………………………………………………………………………………………26
参考文献…………………………………………………………………………………… 27
第一章 绪论
1.1研究背景
汽车悬架能够提高汽车的平顺性和安全性,半主动悬架结构相对简洁,工作时消耗较小的车辆动力,减震效果优异,吸引了广大学者持续关注,与此同时亦获取了一定的研究成果。国外学者在半主动悬架的建模、仿真及控制方面优势明显[1-5]。国内方面,赵新龙等[6]指出了基于磁流变阻尼器的悬架迟滞特性,使用电流嵌入的方法建立电流-磁流变阻尼器模型,以模型为半主动悬架控制基础,并设计了变增益的悬架模糊控制器,通过增益改变悬架磁流变阻来适应路面随机激励的变化。张耀等[7]针对磁流变悬架存在的问题,提出引入位置阈值的方法实现减少穿越速度,据此创新了一种改进型Bang-Bang控制算法,他们还对汽车悬架的振动控制性能进行了模拟仿真和路面试验,验证了良好的性能。庞齐齐、张丽霞[8]开发了一种基于悬架的控制算法平台,分析了悬架调试算法的过程,验证了该平台在调试控制算法、控制过程监控、量化分析控制效果的功能,有针对性的进行研发、调试及验证半主动悬架控制算法。闫盖等人[9]针对悬架的时滞问题,建立了主动悬架系统多自由度的动力学模型,选取理实一体化的方法分析了主动悬架的控制规律。孙晋[10]发现,通过建立四分之一车辆模型,选取控制电流作为优化变量,以轮胎垂直振动行程和簧载质量加速度为优化目标,插入布谷控制的优化算法,提高对路面信息的识别方法,精确的提取当前路面等级,结合悬架阻尼的要求,实现半主动悬架在不平路面下自适应调节。郭孔辉等人[11]优化了的基于加速度的阻尼控制方法,该方法吸取了加速度阻尼控制和天棚控制的两者优点,在进行理论分析时,从相频的角度出发,证明改进算法的优越性,他们还对该算法进行了MATLAB/Simulink仿真试验,开展了可控主动悬架的硬件在环试验,取得了预期的效果。
1.2存在的问题
现有半主动悬架和主动悬架均使用加速度传感器采集路面不平度信息,因此半主动悬架及主动悬架调节滞后性问题尚未得到解决。悬架控制产生滞后性的原因有很多,如车辆运行信息的采集、计算、传输及作动器执行过程中均会产生时滞[12-15]。现行的主动悬架采用加速度传感器采集振动量,然后根据振动量调节悬架阻尼,其控制方式是“先振后调”,是产生滞后性的重要原因。控制过程产生的时滞对半主动悬架系统工作性能颇具影响,甚至会引起反馈控制系统的失稳,产生紊乱的轮跳现象,严重影响了汽车的安全性、平顺性和操纵稳定性[16-18],特别对短距离恶劣路况和不规则越野路面作用甚微。无人驾驶汽车高速驶过不平度较高路面时,如使用一般的主动悬架,在振动发生之后采集振动信号,以控制悬架阻尼和车速,则会产生严重的安全问题。
1.3本文的创新点
与传统减震器根据具体路况作出被动形变不同,本文采用摄像头采集车辆行驶的路面状况,预先获取前方路面状况信息,依据行驶车速、路面状况等因素综合调节悬架的作动器,设计出一种基于机器视觉的主动悬架,根本上解决了悬架调节的滞后性问题。本研究是基于规则化道路的路面,完成路面不平度识别与检测。本文的创新点主要体现以下四方面:
1、创建了基于视频传感的汽车二自由度1/4悬架模型,揭示了路面不平度与汽车预振动量之间的变换规律,并判断该方法的可行性;
2、采用摄像头预先扫描车辆前方的路面状况,建立了不平路面区域的实时检测函数模型,在此基础上实现了模糊神经网络控制算法。
3、设计了基于半主动悬架的软硬件结构,并在硬件结构上实现了基于视觉传感技术的半主动悬架调控方法。
4、开展了悬架系统的单凸块及路面试验对比,验证该方法的优越性。
参考文献
[1] Panos B,Smith M C. Linear quadratic optimal and risk sensitive control for vehicle active suspensions[J].Control Systems Technology,2014, 22 (2) :543-556.
[2] Sun w o o M,Ka C,Huang N J.Model reference adaptive control for vehicle active suspension systems [J].Industrial Electronics,2012 (7) :217-222.
[3] Bosso N , Conte E , Aurelio Soma, et al. Study and Simulation of a Hydropneumatic Suspension for Telescopic Handler Vehicles[J]. International Journal of Manufacturing, 2018, 8(2):334-339.
[4] Palanisamy Senthilkumar, K. Sivakumar, R. Kanagarajan, et al. Fuzzy Control of Active Suspension System Using Full Car Model[J]. Mechanika, 2018, 24(2):145-149.
[5] Afshar K K , Javadi A , Motlagh M R J . Robust H-infinity control of an active suspension system with actuator time delay by predictor feedback[J]. Iet Control Theory & Applications, 2018, 12(7):1012-1023.
[6]赵新龙, 秦雯, 吴双江. 基于磁流变阻尼器的车辆悬架系统控制器设计[J]. 噪声与振动控制, 2019, 39(4):130-133.
[7] 张耀辉,彭虎,张进秋,等.磁流变半主动悬挂引入位置阈值的改进Bang-Bang控制[J].噪声与振动控制,2019(2):14-20.
[8] 庞齐齐,张丽霞,何一超,等.磁流变半主动悬架控制算法验证平台[J].清华大学学报:自然科学版,2019(7):567-574.
[9] 闫盖,方明霞,董天夫,等.基于状态变换法的车辆悬架系统时滞反馈控制[J].农业工程学报,2018(10):54-61.
[10] 孙晋伟,秦也辰,王振峰,等.基于路面识别的非线性悬架系统自适应控制[J].东北大学学报:自然科学版,2018(9):1299-1303.
[11] 郭孔辉,王杨.一种改进的加速度阻尼半主动控制策略研究[J].汽车工程,2019(5):481-486.
[12] 陈龙,施德华,汪若尘等.馈能悬架自适应离线神经网络逆控制[J]. 农业机械学报,2015,46(2):281-286.
[13] 王辉,高翔,陈吉. 基于预瞄信息的主动悬架最优控制[J]. 大连交通大学学报,2009,30(2):54-57.
[14]唐传菌,张国忠.基于最优控制的主动悬架控制器设计[J]. 沈阳大学学报,2008,20(2):1-4.
[15] 王刚,陈长征,于慎波. 含路面预瞄信息的车辆主动悬架有限频域多目标控制[J]. 农业机械学报,2015,46(12):294-299.
[16] 陈士安,王骏骋,姚明. 车辆半主动悬架全息最优滑模控制器设计方法[J]. 交通运输工程学报,2016,16(3):72-79.
[17] 陈双,宗长富. 车辆主动悬架的遗传粒子群LQG控制方法[J]. 汽车工程,2015,35(2):189-193.
[18] 宋刚,许长城. 考虑控制时滞的车辆主动悬架随机预瞄控制[J].农业机械学报,2013.44(6):1-6.
[19] 梁波,苏世毅,罗红. 不平整条件下车-路藕合作用动力分析[J].工程力学,2009,26(3):189-193.
[20]余志生.汽车理论[M]. 北京:机械工业出版社,2006:192-193.
[21] 段虎明,石峰,谢飞,张开斌. 路面不平度研究综述[J]. 振动与冲击,2009,28(9):95-101.
[22] 张小龙,潘登,姜山等. 基于加速度的汽车悬架位移实时测试方法试验研究[J]. 农业机械学报,2013, 44 (10) :15-22.
[23]龚声蓉,刘纯平,季怡.复杂场景下图像与视频分析[M].北京:人民邮政出版社,2013:33-38.
[24] 王健. 视频测速系统中的测距和摄像机标定研究[D]. 南昌: 南昌大学,2008:21-24.
[25] 李欣冉. 橡胶衬套对汽车悬架系统NVH性能影响研究[J]. 合肥工业大学学报:自然科学版, 2012, 35(5):581-584.



