





















基于PLC与弧焊机器人的控制与开发
摘要:本课目前,机器人技术经历几十年的蓬勃发展已经开始广泛应用于各行各业,尤其是工业机器人的出现推动了制造业规模的生产,提高了生产效率和生产质量。本课题来源不同形状和规格尺寸工件的自动化焊接的实际需要,而设计开发的弧焊机器人。 课题首先根据实际焊接工艺,分析弧焊机器人技术需求,在此基础上进行自动焊接机器人机械结构、电气控制及检测方法设计。 机械结构方面,通过软件设计出具有多自由度的弧焊机器人机械结构。通过对关键的零部件进行了非线性分析,保证结构的刚度和强度满足要求。利用机器人工具箱对焊接机器人进行运动学仿真和作业路径规划,为控制部分设计提供依据。 控制系统方面,下位机采用 PLC 控制器,根据焊接工艺,设计 PLC 程序对步进电机驱动器的控制。本课题研制开发的弧焊机器人成功应用于实际工作中,焊接效果达到焊接工艺要求,已经完成出厂预验收。本课题研制的弧焊机器人自动化程度高,机械结构独特新颖,可满足大型构件的现场自动化焊接作业需求。
关键词:弧焊机器人;PLC;运动控制
Control and Development of Arc Welding Robot
based on PLC
Abstract: At present, after decades of vigorous development, robot technology has been widely used in various industries, especially the emergence of industrial robots has promoted the production of manufacturing scale and improved production efficiency and production quality. This topic comes from the actual needs of automatic welding of workpieces of different shapes and sizes, and the arc welding robot is designed and developed. Firstly, according to the actual welding process, the technical requirements of arc welding robot are analyzed, and on this basis, the mechanical structure, electrical control and detection method of automatic welding robot are designed. In the aspect of mechanical structure, the mechanical structure of arc welding robot with multi-degree of freedom is designed by software. Through the nonlinear analysis of the key parts, the stiffness and strength of the structure can meet the requirements. The robot toolbox is used to simulate the kinematics and work path planning of the welding robot, which provides a basis for the design of the control part. In the aspect of control system, the lower computer adopts PLC controller, and according to the welding process, the PLC program is designed to control the stepper motor driver. The arc welding robot developed in this paper has been successfully applied in practical work, and the welding effect meets the requirements of welding process, and the factory pre-acceptance has been completed. The arc welding robot developed in this paper has a high degree of automation and unique and novel mechanical structure, which can meet the needs of on-site automatic welding of large components.
Keywords: Arc welding robot; PLC; motion control
目录
第一章 引言 1
1.1课题来源及研究意义 1
1.2国内外弧焊机器人技术发展与研究概况 1
1.2.1国外焊接机器人技术发展与现状 1
1.2.2国内焊接机器人技术发展与现状 2
1.3本课题的主要研究内容 2
第二章弧焊机器人控制技术 3
2.1焊接机器人的分类 3
2.2弧焊机器人 3
2.2.1弧焊机器人的概述 3
2.2.2焊接工艺参数的匹配 4
2.3常用控制方式 4
2.4弧焊机器人的应用 5
2.5本章小结 5
第三章弧焊机器人工作站系统 6
3.1弧焊机器人的工作流程 6
3.2弧焊机器人的选型 6
3.3弧焊装置的选择 6
3.3.1焊接电源 7
3.3.2焊枪的选型 7
3.3.3防碰撞传感器 8
3.4PLC介绍和选型 8
3.5总体布局设计 9
3.6PLC的外部接线图与I/O表 10
3.6.1外部接线图 10
3.6.2I/O地址表 11
第四章控制系统设计 12
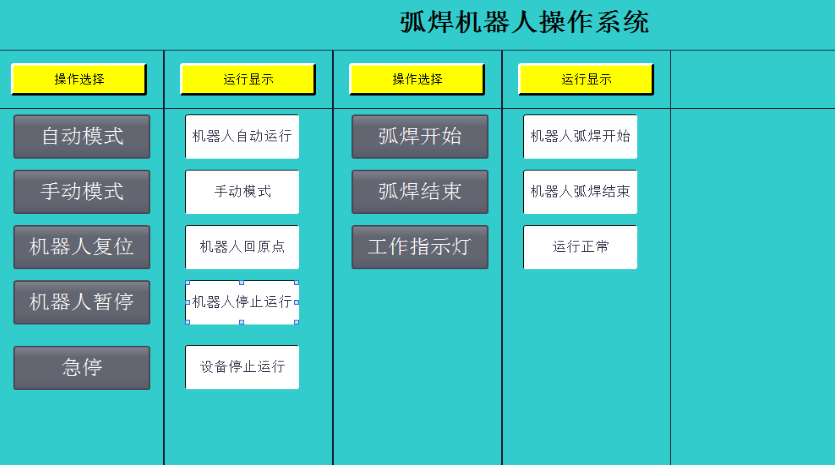
4.1HMI设计 12
4.2PLC的程序分析 13
4.3弧焊机器人的程序设计 15
4.3.1工业机器人的示教编程 15
4.3.2工具中心点及其修正 15
4.4机器人程序分析 15
结论 17
致谢 18
参考文献 19
附录 20
第一章 引言
1.1课题来源及研究意义
随着高速发展的自动化制造,工业标准也随之提高,相应的高科技技术和产品也逐渐出现,弧焊机器人便是高新发展下的一种新型产物。由于弧焊机器人具备焊接质量稳定、工作效率高等优点,在机器人市场中需求较大,所以焊接机器人这一技术发展的十分迅速,在很多领域里面都有应用。
焊接是工业生产的生产制造中十分重要的一环,而且在工业产品制造过程中对工人操作水平及操作技术有很高的要求,因此焊接工人属于紧缺型人才,焊接技术的难度阻碍了与焊接有关的工业技术的发展以及产品的产量,为了解决这个问题就需要大力发展高新科技,利用高科技技术来促进各个行业的发展,此时焊接机器人就有了一定的优势。
焊接质量的关键因素就是焊缝质量,焊缝的标准比较高,要求表面不能有气孔,表面不能有裂纹,焊缝不能未焊满。对于人工焊接,要使焊缝的质量满足焊接工艺的要求,只能通过肉眼观察和经验判断等人工技术。焊接机器人的使用对测量和控制提出了很高的要求。在焊接过程中,焊接机器人自动检查焊枪和焊缝的位置偏差,要求有较高的运动学精度,以确保状态控制的准确性,因此需要机械结构对误差有一定的冗余度。
1.2国内外弧焊机器人技术发展与研究概况
1.2.1国外焊接机器人技术发展与现状
由于美国是工业机器人的发源地,美国的工业机器人技术很成熟,所以产量较高,十年前的产量就远超十五万台。与美国相比,德国的产量也较多,同期产量甚至超过了美国。工业机器人中占比较大的就是焊接机器人,在国外品牌中,焊接机器人的产量远超工业机器人产量的一半。焊接机器人应用领域广泛,除了汽车生产、零件加工等制造产业,还包括开采、运输、工程、能源、建筑等传统领域。这都是根据它的稳定性和高精度所决定的。焊接机器人广泛使用的根本原因不仅在于稳定性,还在于精度高,并且考虑到其低成本的特点,它可以执行更多的模块化操作,将机器臂连接到设备,目的是将现场总线接口连接到焊接机器人控制系统。现在市场上的弧焊机器人主要采用了示教器界面进行编程通过简单的指令可以让人迅速上手操作。如KUKA机器人的示教器采用按键和显示屏的结合,操作者可以进行编程和示教。同时还有比较大且分辨率比较高的显示屏。
同时在硬件方面采用精度比较高的传感器技术来时刻反应各个轴的运行情况确保在弧焊的时候能够快速调整弧焊机器人的焊接途径。还可以在电脑上进行编程然后通过U盘或者直接数据传输进入示教器,然后进行每一个点的示教。这样大大降低了因为调试而浪费的时间使设备更加提前的运行起来。
1.2.2国内焊接机器人技术发展与现状
我国对工业机器人的研究起步较晚,与其他国家相比,其技术起初相对较弱,伴随着现代科学技术对我国的强大影响,以及20世纪90年代以来改革开放的有利条件。我国机器人技术的发展已达到高速发展的水平。特别是在国家高技术研究发展计划(863计划)的大力支持下,我国通过不断的发展和努力已取得了巨大的成就,现在已经研制出多种性能稳定,能高效率工作的机器人。上世纪末以来,我国国民经济得到飞速发展,工业机器人这一领域优先得到发展,在技术上稳定进步。国人先后研制出具有通用性的焊接、装配、运输等机器人。随着机器人的应用范围越来越广泛,机器人行业逐渐成熟。
在我国技术较为领先的工业机器人有沈阳的新松机器人以及专门生产机器人控制器的卡诺普自动控制公司。尽管我国机器人行业进步幅度较大,但是我国产品的质量和海外先进产品的质量仍存在一定差异。主要差距体现在减速机、控制器等核心部件。
1.3本课题的主要研究内容
本课题从用户的实际功能需求这一角度出发,综合国内外焊接技术的发展,提出了弧焊机器人工作的控制方法及工艺方案,完成了对机械、电气控制及工艺方案,对此进行结构设计并进行强度和刚度的分析,并且说明弧焊机器人在焊接领域具有高效性和高质量的重要特性。
第二章弧焊机器人控制技术
焊接机器人主要用于工件的切割和焊接缝隙的机器人设备,一般焊接机器人都采用六轴机器人,一般机器人本体安装在地面方便工作人员进行安装,调试和维护。不同机器人的第六轴也是不一样的,因此在设计工具手时就需要考虑第六轴的圆面也就是法兰盘的大小。一般在安装好工具手后需要进行工件手的调试,下面通过本文对一些概念性的专业名词进行分析解释。
2.1焊接机器人的分类
焊接机器人是一个自动化设备集成系统,按照它的使用,运动方式还有不同的构造可以进行分类,按照机器人的用途可分为弧焊机器人和点焊机器人。
弧焊机器人在弧焊行业中主要应用于船舶制造,军事制造和汽车厂中的钢材焊接,车身缝接等部位。弧焊机器人与周围的弧焊设备相互集成一个系统成为弧焊系统,弧焊机器人只是一个装置,通过不同的装置相互配合组成弧焊系统。在弧焊机器人工作的时候焊枪应该按照示教器编程的指令来进行焊接运动,在使用焊枪的时候需要设置焊枪的速度和精度,焊接速度一定要保证焊枪与被焊接物体保持一些距离,速度要保持匀速,焊缝应该在1-3mm的宽度,焊枪本身有重量会也会在焊接时会有一定的影响。在示教焊枪时,一定要在机器人工作半径内且姿势不能太过弯曲防止机器人各轴达到最大限位出现报警故障。在设置焊接参数时一定要设定焊接的电流,电压等这些影响着弧焊机器人的焊缝的宽度和精度。还有在焊接工件时要有摆动功能比如V字形或则Z字形这样可以防止焊接不牢固。
点焊机器人工作时通过两个电极在两个金属之间形成电阻然后产生高温瞬间熔化金属使之相互结合。点焊机器人多用于汽车零件和车身的结合。
2.2弧焊机器人
2.2.1弧焊机器人的概述
弧焊机器人是一个集成化系统能够通过自身的数据算法和信息整合集机械电气为一体的设备。在弧焊准备焊接的时候可以通过不同的角度和位置以及焊缝的精度环境下进行参数的设置如电压电流的设置,还有调整机器人的姿态,来实现合适的焊接。
通过前期参数的设置和焊枪的调整开始测量工件焊缝的距离以及进行机器人的示教来确保起弧和收弧位置不会因为距离和工件形状造成机器人的不能够到达那一点或者到达极点造成机器人报警。然后开始进行弧焊调试。在弧焊调试之前还需要对焊丝的材料和直径进行选择通过研究工件的材质来选择合适的焊丝。这样前期准备工作才能完成方便下一步进行调试。
2.2.2焊接工艺参数的匹配
采用自动化生产无疑是对机器人的一个挑战。随着智能化的逐渐完善,在汽车弧焊时要考虑弧焊机器人在弧焊时会不会因为一些硬件的安装出现问题从而没有达到工艺要求。因此需要调试者通过不断的测试和修改参数来解决这个问题,关于弧焊机器人的参数设置是整个系统能否实现自动化的必要条件。
2.3常用控制方式
弧焊机器人通过控制系统可以分为伺服控制和非伺服控制。
非伺服控制系统需要先进行程序的编写通过程序中的指令来控制各轴电机的运行,这个工作量可能就要很大了,需要进行各轴运动的数据处理和算法构造等同时还要进行参数优化,如果是简单的三轴机器人没有任何问题,但是多轴机器人(3轴以上)不建议采用此方法。需要大量的算法技术支持和强大的硬件处理器。
伺服控制系统通过采用传感器来检测各轴的运动状态和位置以及速度等关键设备。同时把这些采集到的信息发送到控制器中进行数据整合,在控制器中带有控制和检测各个设备的信息通过算法和数据处理把各个设备状态反馈到示教器汇中。通过示教器来进行参数的修改和调节。其中机器人柜上的硬件开关是为了防止软件出差而修改不成功做出的硬件按钮如急停按钮和启动按钮。示教器相当于一个小型的计算机,可以不借助外界设备完成一些复杂的工作。现在基本上对于精度要求和性能强的机器人都采用伺服控制来保证作业时的安全稳定。
2.4弧焊机器人的应用
随着科技的发展以及智能制造业的崛起,弧焊机器人技术也得到了很大的提高。随着经济的繁荣,人工成本也在不断增加,此时选择自动化设备的优点也渐渐的展现出来,机器人可以连续不间断的进行工作,且精度高,制造出的产品更加合成产品标准。这是人工比不了的,一些简单枯燥的工作可以完全被机器人替代。我国属于制造业大国,每年的钢材消耗量也是非常巨大的,在一些企业对焊接标准非常严格,但是采用弧焊机器人解决整个问题。弧焊机器人的应用现在是衡量一个国家焊接自动化的一个参考标准,它可以降低钢材的浪费同时提高产品的质量。
2.5本章小结
通过本章对弧焊机器人的介绍以及弧焊机器人的发展趋势分析,为了自动化焊接是大势所趋。通过对弧焊机器人的设备系统分析和参数的介绍可以知道弧焊装置在以后是否能小型化且功能化这是需要值得思考和研究的方向,同时关于机器人编程有个简单的了解和认识,为以后的实验设计和研究发展提供了一个方向。
参考文献
[1]徐元昌,工业机器人[M],中国轻工业出版社。
[2]孙立宁机器人技术国内外发展现状,《国内外机电一体化》,2002年第4期。
[3]陈佩云,金茂著,曲忠萍,我国工业机器人发展现状,《机器人技术与应用》,2004年第1期。
[4]曲道奎《工业机器人在汽车焊接中的应用,航空制造技术》2004年第3期。
[5]苏帕顿 焊接机器人,北京机械工业出版社。
[6]余达太 工业机器人应用工程,北京冶金工业出版社。
[7]郑笑红,唐道武等工业机器人技术及应用,北京煤炭工业出版社。
[8]吴瑞祥.机器人技术及应用,北京北京航空航天大学出版社。
[9]刘尧铭 汽车车身装焊技术中的工艺设计与工装设计,焊接技术,2006年第8期。
[10]郭美.,陆小方等柔性焊接机器人系统特点和应用,上海汇众汽车制造有限公司重型汽车厂。
[11]彭振国.汽车制造中焊接技术现状及发展趋势,《汽车工艺与材料》,2007年第二期。



