





















基于 用 MATLAB(仿真软件)以及 MCGS(组态软件)PLC 控制系统的步进电机仿真实训平台设计
摘要 在工业生产中,步进电机以其能够准确控制位置与简单的脉冲信号控制而得到广泛
应用。随着电机技术的快速发展,以及高等教育对技术性人才的重视的日益增加,各类院
校在对学生的专业技术能力的培养愈发重视,但全套实物设备的复数支出与铺设不便于在
实训环节中对所有学生进行有效教学。本文以各类院校教学实训为背景,针对步进电机控
制教学的流程进行替代补充开发,利用 MATLAB(仿真软件)以及 MCGS(组态软件)进行步
进电机的相关模拟研究,让学生在实训阶段能够从软件层面形成对步进电机的认知与理解。
在此后使用 GX Works(三菱编程软件)进行 PLC(可编程控制器)编程与步进电机实物对
接,使学生的理解与认知从硬件层面得到补充与拓展。本文从软件模拟与实物设计相结合,
模拟出步进电机的运动特性曲线,并利用编程软件与可编程控制器结合,简单易行地进行
了步进电机的实物运行展示操作,使实训教学成本降低的同时提高了学生的学习效率。在
提升学生对步进电机的数据认知以及手操运行方面,取得相得益彰的效果,也有利于高校
进行技术性人才的充分培养与教学,提升学生学习工作的创造力与竞争力。
关键词 可编程控制器;步进电机;仿真
目录
第一章 绪论......................................................1
1.1 课题研究的目的和意义................................................ 1
1.1.1 研究目的 ...................................................... 1
1.1.2 研究意义 ...................................................... 1
1.2 国内外研究现状...................................................... 1
1.3 本设计完成的内容.................................................... 2
第二章 系统工作原理..............................................3
2.1 系统构成............................................................ 3
2.1.1 可编程控制器.................................................. 3
2.1.2 步进电机...................................................... 3
2.1.3 步进电机驱动器................................................ 4
2.1.4 电源.......................................................... 4
2.1 系统工作原理........................................................ 4
2.2.1 步进电机运行原理.............................................. 4
2.2.2 可编程逻辑控制器的原理........................................ 7
2.3 本章小结............................................................ 8
第三章 系统硬件设计.............................................10
3.1 硬件设计........................................................... 10
3.1.1 控制系统设计................................................. 10
3.1.2 外部接线与 I/O 口设计......................................... 10
3.2 硬件选型........................................................... 12
3.2.1 步进电机..................................................... 12
3.2.2 可编程控制器................................................. 12
3.2.3 步进驱动板................................................... 12
3.3 本章小结........................................................... 13
第四章 软件设计.................................................14
4.1 软件流程........................................................... 14
4.1.1 MATLAB 仿真软件运用 .......................................... 14
4.1.2 三菱可编程控制器软件 GX Works2 ............................... 15
4.2 软件设计........................................................... 15
4.2.1 步进电机驱动系统............................................. 15
4.2.2 PLC 仿真程序 ................................................. 17
4.3 软件仿真 ........................................................ 18
4.3.1 GX Works2 步进电机控制系统 ................................... 18
4.3.2 Simulink 对步进电机仿真 ...................................... 18
4.4 本章小结 ........................................................ 24
第五章 实训平台仿真.............................................25
5.1 仿真设计 ........................................................ 25
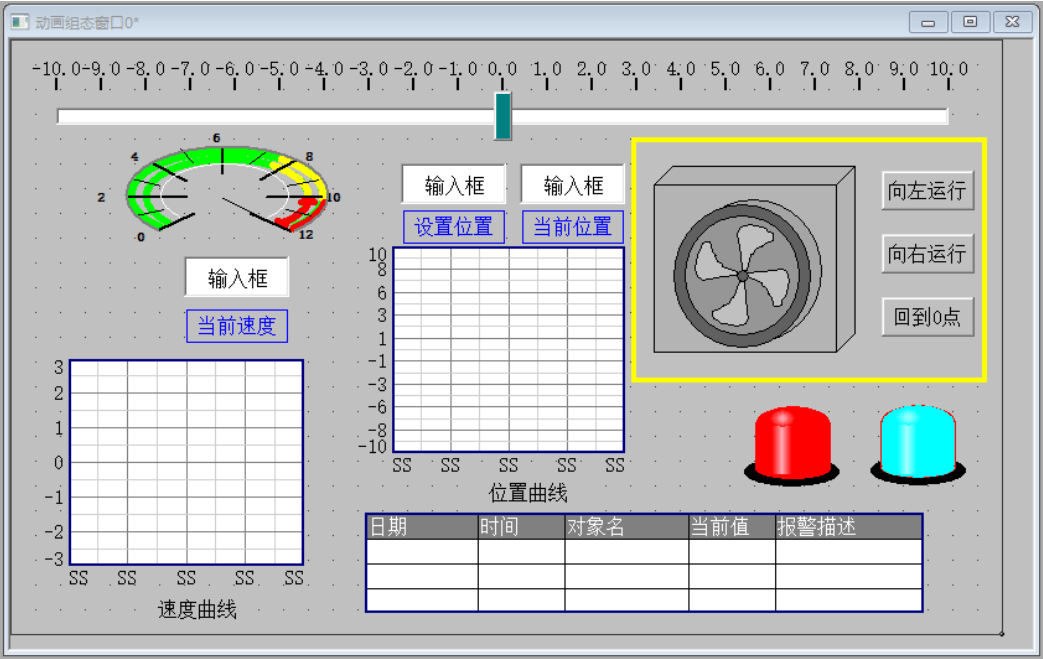
5.1.1 昆仑通态组态软件............................................. 25
5.1.2 组件构成与功能............................................... 25
5.2 系统调试 ........................................................ 27
5.2.1 模拟 PLC 通讯................................................. 27
5.2.2 缺陷与改进方向............................................... 28
5.3 本章小结 ........................................................ 28
结论............................................................30
致谢............................................................31
参考文献........................................................32
参考文献:
[1] 翟雁,郭阳宽.步进电机模糊 PID 闭环控制系统仿真研究,北京信息科技大学光电测
试技术北京市重点实验室现代电子技术. 2015,38(11):146-149
[2] 李德英,任婕灵.基于 PLC 和 MCGS 的步进电动机监控系统设计[J].自动化与仪
表,2019,(第 3 期)
[3] 张航宁,李文新,梁绪.步进电机自适应速度曲线设计及其物理仿真验证[J].空间控制
技术与应用
[4] Alexandru Morar,STUDY ON MODELLING AND SIMULATION OF PERMANENT MAGNET
STEPPING MOTOR BY MATLAB/SIMULINK,Scientific Bulletin of the Petru Maior
University of Targu Mures. 2014, Vol. 11 Issue 2, p34-38
[5] Popescu Emilia Maria,Popescu Constantin Adrian.Identifying speeds and
accelerations for the systems within a didactic stand operated by means of
stepper motors. [J]MATEC Web of ConferencesVolume 343, 2021
[6] 张歆彤.浅谈可编程逻辑控制器[J].信息通信,2018,(第 4 期)
[7] 丁志宇,彭文才,武迪,徐方明,刘成俊.新一代可编程逻辑控制器的研究与实现[J].工
业控制计算机,2020,(第 11 期)
[8] 姜胤欣,邓维克.可编程逻辑控制器技术的发展[J].饮食科学,2017,(第 16 期)
[9] 于广,韩雪,吴桐.基于 MCGS 的可编程逻辑控制器仿真实训平台设计[J].自动化技术与
应用,2022,(第 2 期)
[10] 孙元庆,张凡.机械电气控制中可编程逻辑控制器技术的应用[J].大科技,2021,(第 12
期)
[11] Goryachev O V; Stepochkin A O. Synthesis of an algorithm for controlling
an electric servo drive with a hybrid stepper motor. [J]Journal of Physics:
Conference SeriesVolume 1958, Issue 1. 2021
32



