





















控制桥式起重机执行一项指定的负载的轨迹预测
摘要: 操纵桥式起重机的有效载荷是具有挑战性的,因为它的欠驱动系统——输入输出的控制数量要小于自由度的数量。输出控制(理想的负载坐标),体现在该系统的形式,导致系统的制约因素,并且该方程出现指数为5的微分代数方程,然后转化成指数为3的形式。人们使用一个有效的数字编码来解决由此产生的方程。一个闭环控制策略来反馈实际误差,延伸为前馈控制法获得的这种方法 ,以提供扰动所需的参考负载轨迹的稳定的跟踪
关键词:起重机,动力,控制,轨迹跟踪,微分代数方程
1.导言
桥式起重机属于一个更广泛类型的欠驱动系统——输入输出控制数小于自由度数量的受控机械系统。绩效目标是一个理想的负载轨迹。控制输出i.e.是单位时间的负载坐标x(t)y(t)和z(t).控制输出为力Fx和Fy作用于手推车的位置,并且结合绞车力矩Mn来改变绳子的长度(见图1)测定控制输入的策略,迫使系统完成指定议案是一个具有挑战性
图1
的问题,迄今为止,反映在大量的研究的确立。目的是在这个问题上给一个新的观点,从受限运动角度并制定数学工具,在相对高的速度和没有摆动的情况下来控制设计执行指定的负载轨迹的目的。控制输出,体现在该系统的体系,被当成系统的控制限制。然而,控制的限制在某些方面不同于传统的接触约束,已经引起关注。
主要是他们被现有的可控制力约束着,这对遵照约束流形有一定的指导意义,并且在极端位置与可能正切。必须研制一个方法来解决这种“奇异”的控制问题。初始方程出现指数为5的微分代数方程(DAEs)。然后他们被转化成指数为3的形式,并且人们建议用一个有效的代码来解决由此产生的微分代数方程。一个闭环控制策略来反馈实际误差,延伸为前馈控制法获
得这种方法,以提供扰动所需的参考负载轨迹的稳定的跟踪。
2 数学预算
假设一架自由度为5的桥式起重机见图1.它的广义坐标是 ,并且它被一个M=3的励磁机约束 .该系统的动力学方程可以写成下面这种形式
这里M是广义质量矩阵,d和f是广义动态和应用力向量 是输出控制影响u在广义驱动力向量下的矩阵 。承担吊装绳索是不计质量的,灵活的并且忽略除了由控制输出的所有与s1,s2和l有关的微小因素。Fx,Fy和Mn的动力学方程是
mb,mt和ml是导轨,小车和负载质量。J和r是此刻转动惯量和绞车半径。g是重力加速度,并且x在质量矩阵里面是对称的。
预期目标是一个理想的负载轨迹i.e. m=3输出是一个指定时间的载荷坐标。 和输出控制U相等。体现在该系统的坐标。输出导致m控制限制于这样的形式
在加速条件下,初始方程的控制约束两次不同于遵照时间获得的约束条件。
这里 是m×n矩阵 是一个m×n约束矩阵并且 是约束诱导加速度。对于图1所示的起重机,我们有:
然而公式2在数学上相当于m完全约束C(q,t)=0.受限运动情况的相似轨迹控制问题可能产生误导。假定公式2表示接触约束,公式里的 可以被 替代,并且由假设接触约束的反应是正交的多方面的联系,制约了。相比之下,现有的控制反应可能有任意方向方面的控制约束形式,并且在极端是一些控制反应可正切。在后一种情况下,并不是所有理想的输出 可以被输入系统u直接驱动。“控制奇异”的一个方法就是m×m矩阵的秩
这说明了约束和控制因子的内积。对于手头的情况rank(P)=1,并且这表明仅有一个控制输入(Mn)直接促动公式2里的控制约束条件,另两个物理量(Fx,Fy)对控制限制并无影响。
3方程
该起重机的动力学方程( 1 )可投影到互补性约束和无约束子向量,定义为一个3×5的约束矩阵C和它的和它的正交补集——一个5×2的矩阵,如
则起重机的D可以转化为
推算公式为
并且方程可以被转化为
方程7c 7d分别是方程1在无约束和受限情况下的投影
然而方程7c是m=3的代数方程,我们使用 .,由于方程7c是u的一个独立条件,并且m-p=2限制着起重机,补充到原来对方程2的限制。这样,由于混合正交正切实现控制的限制,汇总起来变成式子m=m-p=5=n,这样的形式是很明确的。在部分特定条件下,这种情况对应于平坦的欠驱动系统。
4.解决方案
对于手头的资料,在10个位置的q,v和控制输出u,方程7代表13个( 5+2+3+3 )微分代数方程.微分代数方程的指数是3,并且利用最简单的欧拉向后差分逼近法可以解决这些问题.要解决的式子可以写成
在时间tn时给出qn和vn,方程8代表13个非线性代数方程在 时 , 和 .通过求解方程组,模拟是从 到 的.为了提高数值解的精确性.欧拉公式可以被高阶落后差逼近法取代.也许它应该引起注意.由于原始的控制约束方程c(q,t)=0,参与方程7,解决方法与违反约束的问题无关.截断误差不在时间上累积,拟订的简单的式子引出合理稳定的解决方案.
5.合成控制
作为方程8的解决方案,时间变化的状态变量Q(t)和V(t)的指定方案,并且得出了保证实现指定方案的U(t).控制获得这种方式可被用来作为前馈控制吊臂执行负荷指定的方案.然后,就应该得到加强反馈控制,以提供对负载轨迹中存在的扰动的稳定的跟踪.其中一个可能性是在加速度条件下引进一个稳定的形式约束方程,而非方程2, 这里的 和 都是增益值.修改导致方程7c被下面式子取代
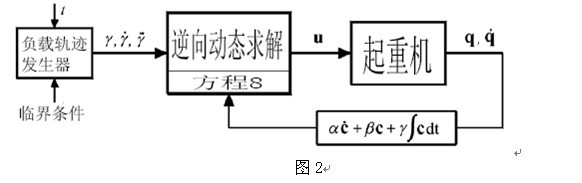
它的基本形式又是0=(b,v,u,t).换言之,约束导致加速度 通过加入对于约束的校正计算,现在修改成稳定的形式 .该混合控制可以再被合成.用这种方法控制起重机如图2所示.
图2
6.数值演算
该起重机使用的数据计算分别为:mb=20kg,mt=10kg,ml=100kg,r=0.1m,J=0.1kgm2.控制的任务是直线运输一项负载任务,按照安放到安放的机动操作
.
这里 并且 分别在时间 和 时,是初始的和最终的负载位置,并且 。 并且 时,负载规格如图3所示
图3
逆仿真的结果是,i.e.解决这个方程7通过用8的解,得到 ,见图4。控制额定这种方式可以仅仅作为一种前馈控制起重机执行指定负载轨迹.
图4
图5
根据方程9,这稳定的混合控制(见图2)第一次被测试,通过在 时执行不一致的安放位置,负载应该放在参考位置下0.5m, .增益值分别被,采取以保证临界阻尼为PID控制计划。i.e.
并且为了整合时间步进 ,一个很好的选择是p=10.结果数值模拟见图5.可以看出,该系统有一个有关参考轨迹的阻尼反应
图6
其他实验构成制衡的影响建模不一致.在动态模型用于直接动态仿真,有关s1,s2和l的额外阻尼已经计算在内,没有考虑到在所用的模型测定混合控制。新增外力为 和 在方程1里面分别以第一,第二和第三次进入的f描述了,并且阻尼系数分别为 和 。通过混合控制,扰乱这种方法的事物顺着参考方案稳定了下来.一些结果的数值模拟如图6所示.而控制特性现在断然不同于基准控制(无型号不一致).该方案的负荷以及起重机的实际运动是很接近的参考运动特性.模拟被延长了,在运输的最后(6s)增长到了8秒.这表明了负荷的震荡也延伸到了其它位置。
7.结论
桥式起重机执行一个指定负载轨迹的控制系统的设计的计算框架已提交.解这些方程的办法是起重机运动特征实现参考方案和控制的需求.前馈控制方案获得了这种方式被一个反馈控制增强.通过使用相同的方程稍加修改得到.




