






基于plc控制的柱坐标式香皂生产线搬运机械手三维建模仿真设计
摘要:随着社会的发展以及科技的不断创新,工业生产逐渐实现机械自动化、自动化。机械手在生产中发挥了重要的作用,它既可以代替人类工作提高了生产率,又可以保证人的生命安全。
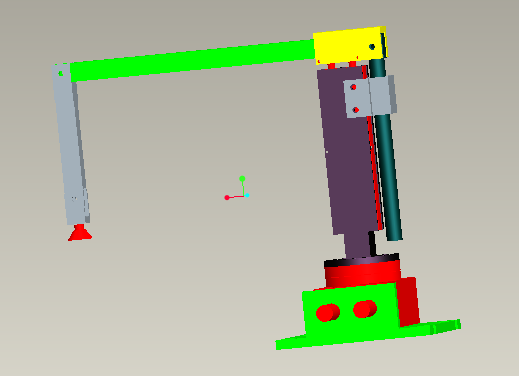
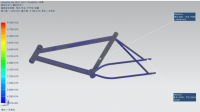
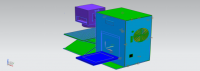
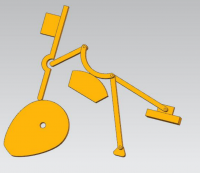
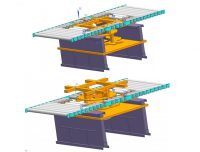
本文详细介绍了机械手的类型及其国内外发展的现状。根据任务书的要求,进行整体的方案设计。该机械手需要两个自由度(旋转、直线),利用三维软件对机构的各部件完成建模。通过参数计算选取了一个摆动缸和一个伸缩缸,设计出气动系统,配上了对应气体回路的气路图。最后确定合适的PLC并对I/O进行分配,编写出PLC程序梯形图。
关键词:机械手,建模,自由度,PLC
Design of the manipulator for the production line of the column coordinate soap production line
Abstract:With the development of the society and the constant innovation of technology, the industrial production is gradually realizing mechanical automation and automation. The manipulator plays an important role in production, it can not only improve the productivity, but also can guarantee the safety of human life.
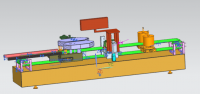
This paper introduces the types of manipulator and the status quo of its development at home and abroad. According to the requirements of the task book, the overall design of the program. This manipulator needs two degrees of freedom (rotation, straight line), and uses the 3D software to complete the modeling of various parts of the mechanism. Through the parameter calculation and selection of the swing cylinder and a telescopic cylinder, design the pneumatic system, gas corresponding to the loop of the pneumatic circuit diagram. Finally, determine the appropriate PLC and assign the I/O, and write the ladder diagram of the PLC program.
Keywords: manipulator, modeling, freedom, PLC
代做农业机械/农业电气自动化专业毕业设计哪家好?一般价格多少?
目录
第一章 绪论 4
1.1 机械手的简述 4
1.2 机械手的组成 4
1.2.1执行机构 4
1.2.2驱动机构 6
1.2.3控制系统 7
1.3机械手的发展前景 7
1.4国内外的发展状况 8
第二章 机械手的设计方案 9
2.1课题来源及意义 9
2.2机械手主要参数 10
2.3机械手分类 10
2.4设计方案 10
3.1手部的结构设计 13
3.1.1手部设计时考虑的几个问题 13
3.1.2吸盘的选择及计算 14
3.2腕部的结构设计 14
3.3臂部的设计 15
3.3.1臂部设计的基本要求 15
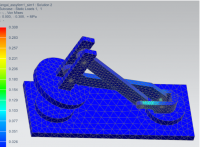
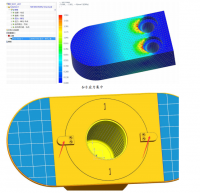
3.3.2臂部的计算校核 16
3.4导轨的设计 17
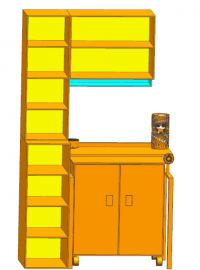
3.5支撑架的结构设计 17
3.5.1气缸的选型步骤: 19
3.5.2气缸的计算 20
3.5.3摆动气缸的选用 20
3.5.4 机身的整体设计 22
第四章 控制系统的设计 23
4.1气动机械手的简介 23
4.1.1气压系统的组成 23
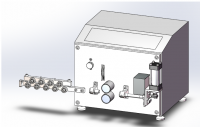
4.1.2气压系统的工作原理及气路图 23
4.1.3气压传动的特点 24
4.2 PLC类型的选取及控制原理 24
4.2.1 PLC种类及型号选择 24
4.2.2 I/O分配表 25
4.2.3程序 27
4.2.4电气原理图 31
4.2.5 传感器的选择 31
第五章 总结 32
参考文献 33
参考文献
[1]龚晓燕Pro/E香皂冷打印机构的虚拟设计与运动分析[J].机械设计与制造,2011(8)
[2]唐善华.Binacchi300香皂打印机传动原理及运动分析[J].轻工机械,2003(04)
[3]唐善华,新型香皂打印机共轭盘形分度凸轮机构[J].轻工机械,2007(04)
[4]张建民.工业机器人[M].北京:北京理工大学出版社,1988.2.
[5]郑堤,唐可洪.机电一体化设计基础[M].北京:机械工业出版社,2005.11.
[6]机器人技术基础[M].武汉:华中理工大学出版社,1995.
[7]黄平主等.常用机械零件及机构图册[M]. 北京:化学工业出版社,2002.10
[8]成大先等. 机械设计手册[M].第四版,北京:化学工业出版社,2002
[9]芦书荣,张翠华,徐学忠,江晓明.机械设计课程设计.成都:西南交通大学出版社,2014.2.
[10]张亚秋.现代实用气动技术.第二版,北京:机械工业出版社,2003.10.
[11]魏伟.PLC控制技术与应用.北京:中国轻工业出版社,2013.7
[12]液压与气压传动.北京:机械工业出版社,2007.5
[13]朱秀琳.机械制造基础.北京:机械工业出版社,2008.8
[14]机械制造技术.南京:江苏教育出版社,2011.8
[15]李海萍.机械设计基础.北京:机械工业出版社,2005.7
[16]刘鸿文.简明材料力学.第二版,北京:高等教育出版社,2008.6



