





















基于信标信号设别的智能车设计
摘 要:本设计采用AT89C52单片机构成主从式的控制系统,双机采用串行口进行通信。红外遥控部分采用普通家用遥控器从而提高的控制的可靠性。超声波传感器进行障碍识别;光敏电阻辅以步进电机控制的转动机构进行光源方向的检测,并能用软件控制小车行驶到光源附近。采用步进电机对小车的转向进行精确的控制,并用红外传感器对转向的角度进行校正。此外,采用四位LED数码管和若干LED发光二极管显示时间以及小车的各种状态;本次设计基于完备的软硬件系统,很好的实现了小车任意曲线行驶、自动查找光源、自动避障并发出指示信息等功能。
关键词: 单片机;超声波传感器;红外遥控;步进电机控制;
Abstract: This design uses two AT89C52 microcontroller constitute a master-slave control system, dual serial port uses to communicate. Infrared remote part of the ordinary household remote control to enhance the reliability. Ultrasonic sensors identify obstacles; detect the direction of the light source rotating mechanism photoresistor supplemented stepper motor control, and the software can control the car driving to a nearby light source. A stepping motor of the car steering for precise control, and use an infrared sensor on the steering angle correction. In addition, the use of four LED digital tube LED light-emitting diode display and a number of times and the car's various states; This design is based on a complete hardware and software systems, to achieve a good car any curve driving, automatically find the light, automatic obstacle avoidance and issuing instructions and other functions....
Keywords: SCM; ultrasonic sensors; infrared remote control; stepper motor control;
目录
第一章 绪论
1.1概述--------------------------------------------------------------1
1.2 设计要求及主要功能介绍-------------------------------------------------------------1
1.2.1 手动控制功能--------------------------------------------------------------1
1.2.2 行车记录功能--------------------------------------------------------------1
1.2.3 超声避障功能--------------------------------------------------------------1
第二章 系统总体设计
2.1 系统功能模块的划分--------------------------------------------------------------3
2.2 单片机数目的选定--------------------------------------------------------------3
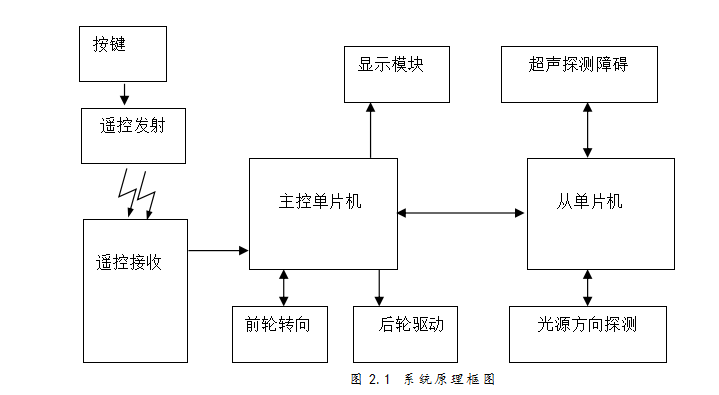
2.3 系统原理框图--------------------------------------------------------------3
2.4系统软件主要特色--------------------------------------------------------------4
2.4.1软件分层结构--------------------------------------------------------------4
2.4.2多任务结构--------------------------------------------------------------8
第三章 硬件模块设计
3.1 红外遥控模块设计-------------------------------------------------------------10
3.2 显示模块设计--------------------------------------------------------------12
3.2.1 多位数码管扫描显示原理-----------------------------12
3.2.2 工作状态指示灯及转向灯的设计-------------------------13
3.2.3 显示模块原理图------------------------------------------13
3.2.4 显示任务的软件设计--------------------------------------14
3.3 声音提示功能的设计-------------------------------------------14
3.4 前轮转向模块的设计-----------------------------------------------15
3.4.1 前轮转向的机械结构------------------------------------------15
3.4.2 步进电机驱动芯片------------------------------------------15
3.4.3 前轮转向任务的软件设计------------------------------------15
3.5 后轮驱动模块的设计------------------------------------------16
3.5.1 直流电机驱动模块L298N------------------------------------16
3.6 超声测距模块-------------------------------------------------------------17
3.6.1 超声测距的理论依据------------------------------------------17
3.6.2 超声发射电路------------------------------------------17
3.6.3 超声接收电路------------------------------------------17
3.7 双机串行通信模块的软件设计------------------------------------------18
3.7.1 通信方式的选型------------------------------------------18
3.8 系统硬件总图 ------------------------------------------18
第四章 系统软件设计
4.1单片机的C语言程序设计简介-------------------------19
4.2 系统的两种工作模式---------------------------------------19
4.3 手动模式的设计------------------------------------------19
4.4 自动模式的设计------------------------------------------20
4.5系统设计总程序------------------------------------------21
第五章 系统组装及调试
5.1 系统的组装、调试------------------------------------------23
致谢-------------------------------------------------------27
参考文献---------------------------------------------28
附录一 系统硬件原理图----------------------------------------29
附录二 程序清单------------------------------------------30
第一章 绪论
1.1 概述
单片机以其强大的控制能力已经被广泛应用于诸多领域,配以各种传感器可以实现系统的智能化。无论是在工业控制领域、医疗卫生领域、还是在国防军事领域、航天航空领域,微控制器都起着举足轻重的作用。从最初的8位控制器到现在的16位、32位控制器都还有很大的发展和应用空间。
目前市场上已有很多种用超声波传感器制作的产品,在汽车电子领域,用超声波传感器做的倒车雷达可以提高汽车行驶的安全性。对汽车驾驶员来说车身后方是一个视线的“死区”,倒车时得非常小心,倒车雷达的出现就解决了这一问题,当车身后方有障碍时能及时发出警告。
八十年代伊始,世界许多国家都进行了消防机器人的研究。在很多的火灾当中,消防人员不可能在短时间内到达高处的火灾现场,在地下建筑中,由于环境潮湿,浓烟不易扩散,消防人员不易判定火源位置,这些都为灭火机器的出现埋下伏笔,本设计通过光敏电阻加以硬件电路对光源进行检测,然后使小车驶向火源执行下一步的操作。
1.2 设计要求及主要功能介绍
根据题目要求,本设计需要完成的以下几项功能:
(1)红外遥控功能,启停,自动或手动;
(2)小车能够前或后直线行进;
(3)小车能够沿着任意曲线(标定线)行进;
(4)小车具有测距避障功能,在行进过程中能够检测前后方障碍物的距离并避免与障碍物接触;
(5)具有行车记录功能,显示行进距离;
(6)LED指示、蜂鸣警报功能;
1.2.1 手动控制功能
若在行驶过程中遇到障碍小车将自动停止手动控制模式下,可以控制小车的前进、后退、左转、右转、停止、显示时间,,并发出声警告信号。同时,在转弯或后退时相应的转向灯和倒车灯会闪烁发光,小车接到按键命令后会发出警告音,用以告之操作者按键有效。
1.2.2 超声避障功能
在手动模式下,超声测障模块始终工作。在前进时发现前方有障碍,或在后退时发现后方有障碍小车都将立即停车,并发出声光报警信号告知操作者。障碍检测的距离调整在20厘米内,即只有在20厘米之内有障碍时小车才会做出避让动作,在这个范围之外的障碍小车不予处理。



