





















智能寻迹电动小汽车2 摘要: 简易智能电动车实现了路面标识跟踪、金属探测、曲线行驶、躲避障碍物、寻找光源以及安全进入车库等功能,并且能够在行驶过程中用语音、指示灯等方式提示电动车的行驶状态。
采用左右独立的传动模式行驶,通过光电、红外和接近开关等传感器,由单片机系统来决策智能车的行驶状态。采用 PWM 技术实现了电动机的多级调速;采用硬件自学习电路提高对不同黑白程度路面的适应能力。独特的雷达扫描式光电探测装置保证了光源探测的灵活性,提高了控制决策的有效性。
不同路段的软件模块对各个传感器赋以不同的权值,提高了各个路段行驶策略的针对性。通过均值采样算法降低了噪声信号的干扰,通过模糊控制算法实现了智能避障和光源跟踪。采用原子模块循环法实现数据采集、分析、处理和控制输出。
关键词 :电动车 智能 PWM 硬件自学习 雷达扫描式光电探测
1方案选择与论证
1.1运动方式的选择
通常的运动方法有轮式和履带驱动式两种,其选择依赖于路面状况、机械复杂性和控制复杂性。
方案一:采用四轮 —— 常见的汽车结构模式
特点是一个马达作为动力,通过变速箱驱动后轮;另一个马达转动导向轮来决定行驶方向。优点是在直道行驶速度较快、 方向和速度相互独立。 缺点为转弯半径大、驱动轮易打滑、导向轮方向不易精确控制。
方案二:采用履带式结构
特点:两个电机分别驱动两条履带。优点是可以在原地转动;在不平的路面上性能稳定,牵引力大。缺点为速度慢、速度和方向不能单独控制摩擦力很大;能量损耗大,机械结构复杂。
综合考虑,我们将轮式和履带式的优点结合在一起,采用两个大脚车的模型拼接而成,达到了较好的机动性和可控性。
1.2电机驱动调速方案论证
电机驱动调速方案的控制目标是实现电动机的正、反转及调速
方案一:电阻网络或数字电位器调整分压
采用电阻网络或数字电位器分压调整电动机的电压。但电动机工作电流很大;分压不仅会降低效率,而且实现很困难。
方案二:采用继电器开关控制
采用继电器控制电动机的开或关,通过开关的切换调整车速。优点是电路简单,缺点是响应时间慢、控制精度低、机械结构易损坏、寿命较短、可靠性低。
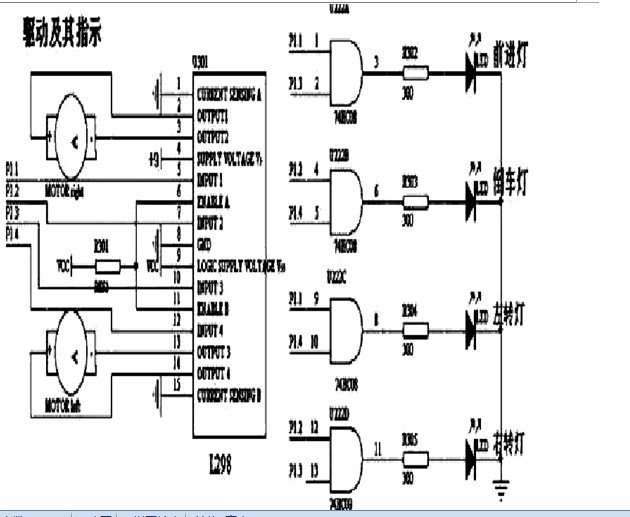
方案三: H 型 PWM 电路
采用电子开关组成 H 型 PWM 电路。 H 型电路保证了简单的实现转速和方向的控制;用单片机控制电子开关工作的占空比,精确调整电动机转速。最终选择方案三。
1.3路面探测方案论证
探测路面黑线的原理:光线照射到路面并反射,由于黑线和白线的反射系数不同,可根据接收到的反射光的强弱来判断传感器和黑线相对位置。
方案一:采用可见光发光二极管和光敏二极管
采用普通可见光发光管和光敏管组成的发射-接收电路。其缺点在于易受到环境光源的影响。即便提高发光管亮度也难以抵抗外界光的干扰。
方案二:采用反射式红外发射-接收器 目录
摘要……………………………………………………………………………………17
1方案选择与论证……………………………………………………………………18
1.1运动方式的选择……………………………………………………………18
1.2电机驱动调速方案论证……………………………………………………18
1.3路面探测方案论证…………………………………………………………19
1.4障碍物探测模块……………………………………………………………19
1.5寻光定向模块………………………………………………………………19
1.6车轮检速及路程计算模块…………………………………………………20
1.7供电电源选择………………………………………………………………20
1.8方案论证总结………………………………………………………………20
2硬件的设计与实现…………………………………………………………………21
2.1电动机PWM 驱动模块的电路设计与实现………………………………21
2.2 路面黑线探测模块的设计与实现…………………………………………22
2.3障碍物探测模块……………………………………………………………24
2.4寻光定向模块………………………………………………………………24
2.5车轮检速及路程计算模块…………………………………………………25
2.6金属探测模块………………………………………………………………25
2.7语音模块……………………………………………………………………26
2.8地形自动匹配模块…………………………………………………………27
2.9硬件设计总结………………………………………………………………28
3软件设计……………………………………………………………………………28
3.1 整体设计……………………………………………………………………28
3.2策略分析……………………………………………………………………29
3.3 时间、距离统计及车速检测程序…………………………………………33
4系统调试、测试及结果分析………………………………………………………33
4.1系统调试……………………………………………………………………33
4.2系统测试及结果分析………………………………………………………33
5附录…………………………………………………………………………………36
5.1主电路…………………………………………………………………………36
5.2 传感器连接电路图……………………………………………………………37
6参考文献……………………………………………………………………………38
参考文献
1. 李正军。计算机控制系统。北京:机械工业出版社,2005
2. Ramon Pallas-Areny,John G. Webster(美)。传感器和信号调节,第2版。张伦译。北京:清华大学出版社,2003
3. 船仓一朗,土屋 尧等(日)。机器人控制电子学。宗光华,杨 洋,唐伯雁译。北京:科学出版社,2004
4. 罗亚非等。凌阳16位单片机应用基础。北京:北京航空航天大学出版社,2003
5. 童诗白,华成英。模拟电子技术基础。北京:高等教育出版社,2003
6. 阎石。数字电子技术基础。北京:高等教育出版社,1983
7. 高峰编。单片微型计算机原理与接口技术。北京:科学出版社,2003
8. 21IC中国电子网。www.21ic.bysj1.com
9.万方数据资源统一服务系统。www.wanfang



