




基于单片机的磁悬浮控制系统设计与实现
摘要:磁悬浮技术指的就是物体通过磁场相互作用力抵消自身重力使得物体与物体直接有空隙的一种状态,这种状态的特性能够使各种机械结构保持高速度且无摩擦运转,其在工程应用方面的问题一直处于国内外研究的热门状态。本课题介绍的是一种基于单片机的磁悬浮控制系统,首先介绍了磁悬浮技术发展过程、目前研究状态以及未来发展趋势等。接着从该系统硬件电路的设计以及软件的设计两方面着手进行介绍这套系统。硬件电路主要从浮子位置检测模块、单片机控制模块、线圈驱动模块和电源模块这几个模块进行介绍。软件主要从利用单片机进行PID计算结果送至PWM输出的程序设计进行介绍。该系统将单片机技术与磁悬浮技术结合到一起,原理简单、构造简洁、操控性强等优点。因此该系统具有一定的研究使用价值。
关键词:单片机;磁悬浮;PID
Design and Implementation of Magnetic Levitation Control System Based on Single Chip Microcomputer
Abstract: magnetic levitation technology refers to a state in which the object has a direct gap with the object by counteracting its gravity through the interaction force of magnetic field. The characteristics of this state can keep various mechanical structures running at high speed and without friction. Its engineering application has been in a hot state at home and abroad. This paper introduces a magnetic levitation control system based on single chip computer. Firstly, it introduces the development process, current research status and future development trend of magnetic levitation technology. Then the system is introduced from two aspects: the design of hardware circuit and software. The hardware circuit is mainly introduced from float position detection module, single chip control module, coil drive module and power module. The software mainly introduces the program design of the PID calculation result sent to the PWM output by using single chip computer. The system combines the single-chip computer technology with magnetic levitation technology. It has the advantages of simple principle, simple structure and strong manipulation. Therefore, the system has certain research and application value.
Keywords: single chip computer; magnetic levitation; PID
目录
第一章 绪论 1
1.1项目研究背景 1
1.2项目研究现状 1
1.3项目研究目标及主要内容 2
第2章 系统总体设计与工作原理 3
2.1 系统总体概述 3
2.2 工作原理 3
第3章 系统硬件电路设计 4
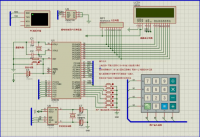
3.1硬件系统结构概述 4
3.2硬件选型 5
3.2.1单片机介绍 5
3.2.2稳压芯片介绍 7
3.2.3双桥驱动芯片介绍 8
3.2.4四路运算放大器介绍 9
3.2.5霍尔传感器介绍 11
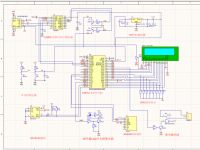
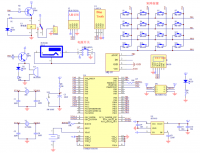
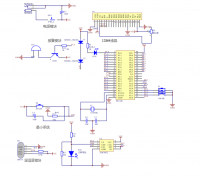
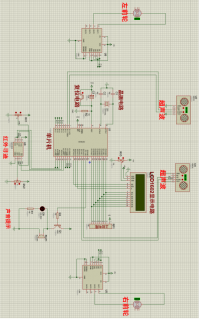
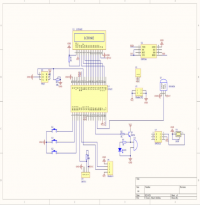
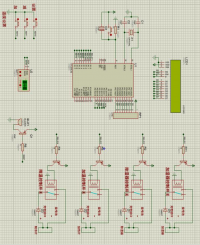
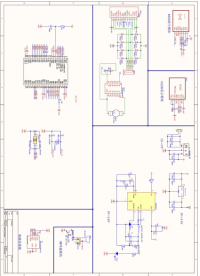
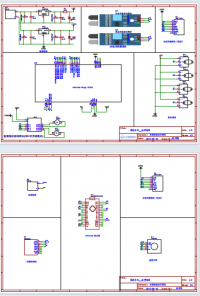
3.3硬件电气原理图设计 12
3.3.1电源模块设计 12
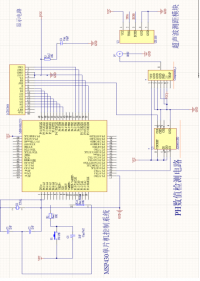
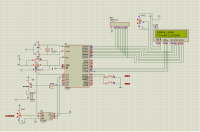
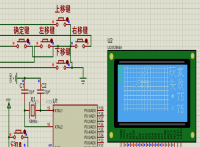
3.3.2单片机控制模块设计 13
3.3.3 位置检测及线圈驱动模块电气原理图介绍 14
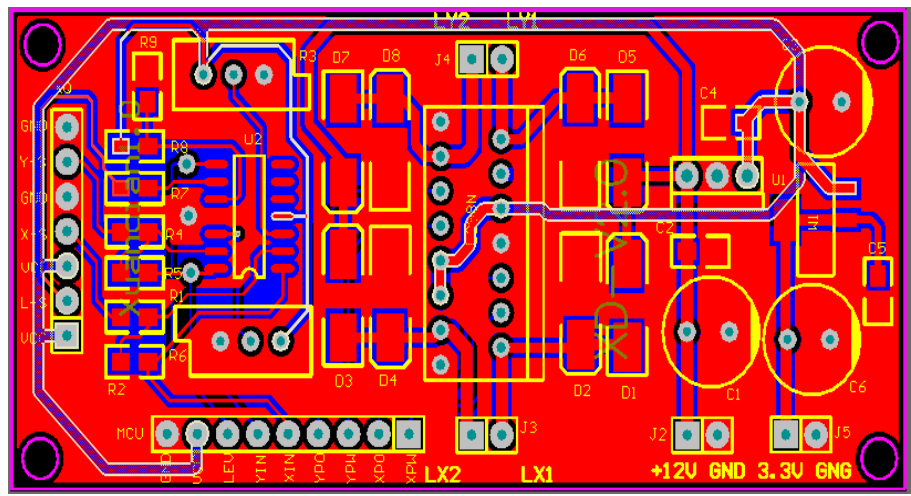
3.4硬件电气PCB板设计 17
3.4.1电源及信号放大驱动板设计 17
3.4.2线圈PCB板设计 19
第4章 系统软件的设计 21
4.1 软件需求分析 21
4.2 单片机引脚定义 21
4.3 系统流程图设计 21
4.4系统主要程序设计 23
4.4.1信号采集程序 23
4.3.2 A/D转换程序 24
4.3.3 PID计算程序 25
4.3.4 PWM输出程序 27
第5章 系统工作过程及调试方法 28
5.1工作过程 28
5.2调试方法 28
5.2.1 软件部分调试方法 28
5.2.2 硬件部分调试方法 30
第六章 总结与展望 33
6.1总结 33
6.2展望 33
第七章 致谢 34
参考文献 35
附录 36
第一章 绪论
1.1项目研究背景
磁悬浮指的就是指物体通过磁场相互作用力抵消自身重力使物体得物体与物体之间处于没有接触的状态,处于悬浮状态的特性能够使各种机械结构保持高速度且无摩擦运转。它看上去虽然简单,但是却使科学家们付出了很大的时间精力的代价。才能够使它无接触的状态,得以最终实现。因为磁悬浮技术的原理是由电磁、电子技术、控制技术工程、模拟数字信号处理、机械动力学等相结合为一体的高新技术。伴随着大批科技工作者们持之以恒的研究,使得科学技术水平的不断发展以至于新的电磁材料不断地被发现。最终磁悬浮技术神奇的一面就展现到了人们眼前。早在20世纪初,西方国家的科学家们就对于早期的磁悬浮模型提出了许多猜想。他们还提出了在磁悬浮列车上将他们的猜想变为现实。
但是,由于当时的科学技术处于一个比较低的阶段,以及新的磁性材料尚未被发现。从而使得磁悬浮列车仅仅处于模型状态中,并没有研究出一个有用的办法来使这种模型成为现实。一直到了1934年,德国科学家赫尔曼·肯佩尔将这种想法变成了现实并且还申请了专利。第一代磁悬浮列车就这样产生了,到了20世纪中后期,德国科学家蒂森亨舍尔对第一代磁悬浮列车系统进行了改良并且将它运用到实际生活中。这个时候德国才正式将这一套系统以“磁悬浮”来命名。19世纪60年代末,美国的詹姆斯·鲍威尔和戈登·丹比两位科学家又提出了将磁悬浮系统运用到交通运输行业的概念。世界上第一套具有实用性质的磁悬浮运输系统便这样产生了。从那时起,随着工业制造水平的提升,世界经济体规模的持续扩大,从而导致对交通运输业的依赖愈来愈大,一些经济比较发达的国家便开始着手对磁悬浮运输系统进行研究,以满足其经济发展的需要。
然而,因为磁悬浮系统是通过改变电流改改变磁场间的相互作用力从而实现悬浮、改变方向、提供动力等功能,假设给磁悬浮系统断电后会产生什么影响。尤其是当列车停车正在运行状态中突然停电该怎么办?这些问题都还没有解决。所以它在运行过程中的可控制性仍然需要进一步的去研究。
1.2项目研究现状
伴随着科技力量的持续壮大,各国都在积极的研究磁悬浮技术。目前处于世界各国正在研究的悬浮技术大致有电磁悬浮、声悬浮、静电悬浮、光悬浮以及粒子束悬浮等等,电磁悬浮是现在已研究相比其他悬浮较为成熟的技术。磁悬浮技术原理示意图目前世界上有三种类型的磁悬浮。一是以德国为代表的常导电式磁悬浮,二是以日本为代表的超导电动磁悬浮,这两种磁悬浮都需要用电力来产生磁悬浮动力。而第三种,就是我国的永磁悬浮,它利用特殊的永磁材料,不需要任何其他动力支持。
因为这种系统的形式和结构各不相同,普遍具有高度非线性和模型不确定性,目前虽然已有许多智能控制方法应用到磁悬浮球系统控制当中,例如自适应控制、滑模控制、鲁棒控制方法等,但大部分都仅限于仿真阶段;PID控制器虽然简单易调,但要实现高精度、鲁棒性强的磁悬浮控制依然存在一定的局限性,而且结合蚁群算法等优化方法的智能PID由于过于复杂而难以在工程中广泛应用,因此,设计一种简单有效且抗扰性能强的磁悬浮控制系统是非常有意义和具有挑战性的课题。
1.3项目研究目标及主要内容
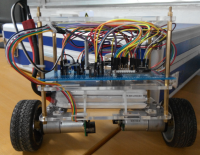
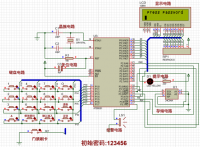
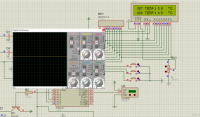
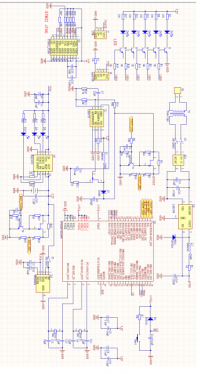
本项目以磁悬浮浮子为控制对象,搭建磁悬浮控制系统软硬件平台,该平台主要包括单片机控制系统、位置检测系统及对应的采样电路、功率放大器和线圈等部件。系统控制器设计控制算法使浮子悬浮在设定的平衡位置,浮子的悬浮位置信息环形磁铁和霍尔传感器组成的位置检测模块反馈获取,如此便形成一个闭环控制系统,同时要求闭环系统具有较好的动态、稳态性能以及一定的抗干扰能力。
本课题中的磁悬浮控制系统拟采用以下方法实现:将线圈成对的放置在环形磁铁的中间位置,通过改变线圈中电流的大小以及电流的方向,使得环形磁铁中的磁场向上的作用力发生改变。这样的话浮子与环形磁铁之间的相互作用力也会随之发生改变。因此如果磁场向上作用力能够与浮子的向下重力相互抵消掉。这样浮子便会处于无接触状态悬浮起来。但是这种状态极不稳定,如果浮子在平衡状态下受到其他力的干扰,这种状态便会被打破。浮子便会跌落下来。由于浮子受到向下的重力发生改变,而此时的环形磁铁中向下的磁场作用力并没有改变,所以本来能够抵消掉的力发生了变化就抵消不掉导致系统处于一个极不稳定的状态。如果想要该系统处于一个比较稳定的状态。那么就需要根据实时浮子向下的重力而改变环形磁铁中向下磁场作用力。因此该系统需要增加一个闭环控制反馈电路。实时将浮子向下的作用力通过传感器输入到单片机。单片机根据接收到的信号进行运算,通过改变环形磁铁中线圈电流的大小以及电流的方向从而改变磁场向上的作用力。使其与浮子向下的重力实时相等。从而使该系统能够一直处于一个相对稳定的状态。能够具有一定的抗干扰能力。
参考文献
[1]陈倚重.单片机在线开发环境设计[J/OL].电子技术与软件工程,2019(07):237-238[2019-04-22].
[2]严刚峰.PID控制器参数整定复杂性的分析[J].成都大学学报(自然科学版),2019(01):64-68.
[3]石静波.霍尔传感器在电流检测中的应用[J].电子测试,2018(12):7-8.
[4]赵雅静. 霍尔传感器读出电路设计[D].北方工业大学,2018.
[5]李世甲,万超,李海龙,蔺瑞英.基于PID控制器的滚球控制系统设计与制作[J].装备制造技术,2017(11):68-70.
[6]何颖卓,李春芝.磁悬浮列车简介[J].科技创新与应用,2017(27):22+24.
[7]纪源.磁悬浮技术原理及其应用[J].数字通信世界,2017(08):27+158.
[8]陈启新.基于单片机的磁悬浮系统的设计[J].电脑知识与技术,2017,13(05):179+189.
[9]黎殿来,董士崔,宋向华.PID控制参数在线自整定方法综述[J].电子世界,2016(22):127.
[10]吴育军.浅析单片机的应用与发展[J].无线互联科技,2016(13):22-23.
[11]崔世伟. 磁悬浮球控制系统离散滑模控制研究[D].重庆大学,2016.
[12]向楠,黄道业.基于MSP430F5438A单片机的磁悬浮控制器设计[J].长江大学学报(自科版),2014,11(07):64-66+4.
[13]王萌.基于LM3S1138单片机的PID控制器设计[J].机械工程与自动化,2012(03):157-158.
[14]王义进. 基于DSP磁悬浮球控制系统的设计与研究[D].厦门大学,2007.
[15]卢建华,刘爱元,王立元.一种磁悬浮球数字控制系统的研制[J].仪表技术与传感器,2001(01):23-24.
[16]卢建华,刘爱元.基于MCS-51单片机的磁悬浮球数字控制系统设计[J].微计算机信息,2001(02):15-16.



