





















基于PLC控制系统的楼宇擦窗机设计
摘要:本课题以是根据高楼外壁玻璃面清洁需要,开发量基于PLC控制系统的楼宇擦窗机。本课题首先通过阐述擦窗机研究的意义以及PLC在国外和国内的发展历史 ,从而提出自动擦窗机器人是基于PLC开发的。其次,提出了基于PLC控制系统的楼宇擦窗机的组成和技术上的特点及技术指标;然后,对现实生活中的擦窗机器人市场的需求、能够适用的场合以及综合表现来说明擦窗机器人的潜力。最后,介绍三菱PLC优点并且在此基础上进行擦窗机器人软件部分的设计。结论部分则是说明了在日益进步的现实生活中,擦窗机器人的出现和使用是势不可挡的。
关键词:擦窗机器人;PLC控制系统;自动;楼宇
The Development of Handling Robot Based on PLC Control System for Building Window Cleaning Machine
Abstract: This topic is based on the needs of high-rise external glass cleaning, development of building window cleaning machine based on PLC control system. In this paper, the significance of the research on the window cleaning machine and the development history of PLC at home and abroad are described, and the automatic window cleaning robot is developed based on PLC. Secondly, the composition, technical characteristics and technical indicators of the building window cleaning machine based on PLC control system are proposed. Then, the market demand, applicable occasions and comprehensive performance of the window cleaning robot in real life are described to illustrate the potential of the window cleaning robot. This paper introduces the advantages of Mitsubishi PLC, and designs the software of window cleaning robot based on it. The conclusion shows that the emergence and use of window cleaning robot is irresistible in the increasingly progressive real life.
Keywords:Window cleaning robot; PLC control system; automatic; building
目录
第一章 引言 1
1.1课题来源及研究意义 1
1.2国内外PLC控制系统技术发展与研究概况 1
1.2.1国外PLC控制系统技术发展与现状 1
1.2.2国内PLC控制系统技术发展与现状 2
1.3 擦窗机的发展史 3
1.4本课题的主要研究内容 5
第二章 基于PLC控制系统的楼宇擦窗机现实生活的应用 7
2.1擦窗机器人市场需求 7
2.2 楼宇擦窗机适用场合 9
2.3 发展现状 9
第三章 基于PLC控制系统的楼宇擦窗机总体结构 11
3.1楼宇擦窗机概述 11
3.1.1技术特点 12
3.1.2硬件系统组成 12
3.1.3技术指标 14
第四章 擦窗机器人控制系统软件设计 16
4.1 编程语言简介 16
4.2 擦窗机器人软硬件调试系统 16
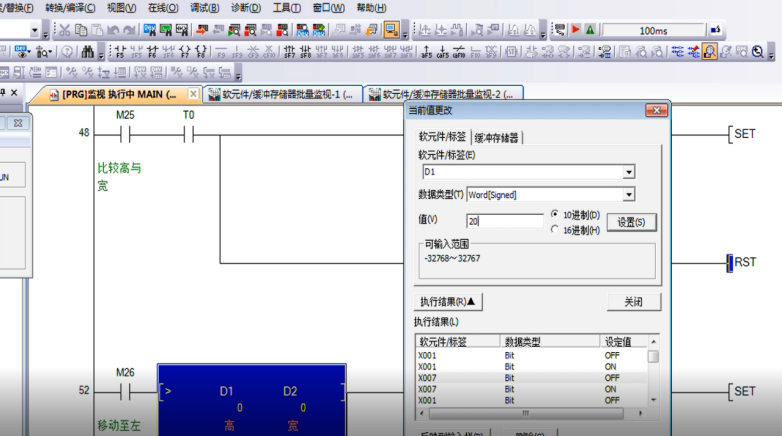
4.3 PLC控制系统软件设计 21
结论 31
致谢 32
参考文献 33
附录 34
第一章 引言
1.1课题来源及研究意义
本课题来源于人们日常生活。在飞速发展的现代社会中,许多高楼建筑为了美观往往采用玻璃外壁设计,这样能让建筑看起来有一种美观大方的感觉。要维持这种感觉就需要对建筑的外壁进行定期的清理工作,但是对于人们来说这个工作量是十分巨大的。
光滑的玻璃表面也会带给清洁工人一些危险,于是高楼清洁工作也就是变成了一种危险职业。
但是伴随着工业自动化水平不断提高,人们经过不断地他所研究,最终出现了一些可以帮助人们干活的家用机器人,如扫的机器人、洗碗机和擦窗机器人等。本课题研究的擦窗机器人是一种可以吸附在玻璃表面且能够自动感应区域边缘的全自动机器人,它地出现在很大程度上可以减轻人们负担,也在一定程度上解决了人们生活中高楼工作的危险。
人们没有必要为了打扫高处的窗户而将自己置身于危险中了,擦窗机可以帮助人类解决窗户不干净的问题同时还为操作工人提供了良好的工作环境。
在大型建筑的清洁工作中,擦窗机器人的地位日益突出。它的出现让繁杂的清洁任务变得简单,让经济上的负担情况不再那么十分严重。
从擦窗机的出现我们可以看出人们生活水平的不断提高,人们对于智能家居生活的追求以及智能发展的具有的宽阔市场。
1.2国内外PLC控制系统技术发展与研究概况
1.2.1国外PLC控制系统技术发展与现状
PLC顺序控制驱动系统是它是在采用传统的工业顺序驱动控制器的技术基础上上又引入了现代微电子控制技术、计算机控制技术、自动控制系统技术和无线通讯控制技术而发展形成的它是一代新型号的工业顺序控制驱动装置,这种新型的工业顺序控制设备,其目的主要是为了使用户能够更好地替换继电器、执行逻辑、记时、计数等顺序控制的功能。
早在二十世纪八十年代可编程逻辑控制器(PLC)就处于巨大的发展机遇中近年来,PLC的发展与使用的趋势已经是势不可挡了。能够制造PLC的全球范围内的生产单位超过两百多家,其中大型生产厂家也是最知名的厂家有7家。它们分别是美国的A-B公司、GE-FANUC公司、AEG-MODICON公司、日本三菱电机、OMRON(欧姆龙)公司;德国的西门子公司;法国的TE公司。这七家公司占据全世界PLC生产总量的八成以上,我们不可否认它们在PLC方面的领先。
这七家公司生产链生产着各种各样的PLC型号,从低档到高档、从小型到大型的PLC应有尽有。在他们不同的厂家之间,PLC的编程方式却是采用相同的并且可以以多种方式进行相互之间的连接,同样有助于完整工业体系的构成。
现如今,国外已经在发展超越第四代的PLC技术了。新的改进不断地被人们发现,PLC的产品更新也越来越快,几乎是不到三年就会革新一次。新的PLC往往具有更多的优点更多的功能,它们正在积极尝试着从组合式的单机平台系统单机自动管理控制系统管理服务方式向灵活配置的平台单机递阶式的平台单机系统控制自动管理服务方式这个方向进行发展。其改进往往包括系统结构优化、更运算能力加强、加入更多的应用场合的等。除此以外,国外PLC的编程语言也是发展特别快,PLC能够做到的也更多了。
1.2.2国内PLC控制系统技术发展与现状
我国的PLC技术起步于上世纪七十年代,其中经历了三个特殊阶段。这三个阶段按出现时间从早到晚分别是独立功能元件和小、大规模的集成电路这三个阶段。就现在目前的形势来讲,中国和其他发达国家在PLC研究方面上的差距大约不到六年。更可怕的是在一些例如CPU的系统结构技术、通讯技术等重要的核心技术方我们中国现了解的还不足以和那些国家等量齐观。即使我国在PLC方面学习、研究和生产的点有很多,但是想要追上发达国家的技术上的不还任是任重道远啊。
我们中国从来都不会蹉跎时光的,即使在技术方面的发展异常艰辛,我们依然迎难而上。在对传统工业的改造上,着重于研究带有PLC的设备。为促进工业改造,我国尽可能地引进PLC相关设备,就之前有迹可循的PLC引进的例子就超过3个亿的人民币。
随着时间不断地推移,大量国产PLC涌现。在研究出结果的情况下,我国生产厂家可以轻松制造超过1000台小型的PLC。例如上海起重电器厂,他们生产的PLC可以很好地兼容三菱公司的PLC。甚至一些国产企业寻求与外企合作研制国产PLC,这些PLC的出现也就表明了我国在PLC技术上取得了进一步地提升,我国PLC技术上与发达国家在此技术上的落后缩小了许多。
中国的科技强国之路上PLC的发展是重要部分。中国在目前世界上公认是制造大国,于是我们制造产品就必须有大量的制造设备,而这些制造设备大部分都是以PLC为核心的,我们只有自主研发出高效的PLC并且培育出大量的PLC控制人才,这样我们中国才不会受制于人。我们可以从制造大国向创造大国不断前进。中国人必须付出更多的努力,不但要追赶上发达国家对PLC制造的步伐,而且要怀着超越的心思。只要这样随着时间的不断推移,我们中国也可能成为世界上第八个PLC技术强国,到时候就是真的科技强国了。
1.3 擦窗机的发展史
擦窗机器人有着悠久的发展历程,它的出现往往就是大众迫切需要的。早在二十世纪八十年代初期,日本就关注了擦窗机器人这一具有潜力的发展行业。最早是一家缆车公司发明创造了升降式的擦窗机原型,随后相隔五年有创造了横向移动的擦窗机。直到上世纪九十年代中期,自动擦窗机已在日本出现了商品化的现象。在当时的擦窗机,结构复杂,往往需要在外壁铺设类似轨道一般的东西。擦窗机的工作则需要在校车的引导下进行工作。此类擦窗机因其过于庞大的体积和过于复杂的结构导致其不能够普遍适用于各种建筑,于是在稍后的时光里渐渐地淡出了人们的视野。
与日本相似的,一早想到并创造擦窗机器人的还有美国和俄罗斯。他们对于擦窗机的研究也是在1990年前后。美国发明的是适用在比较高的地方的装置,它是一种L型框架的擦窗机。在擦窗机上可以安装多个吸盘,通过吸盘的轮流工作,可以起到一定的跨越墙壁的工作。该结构的擦窗机利用事先预备的清洁剂以及擦拭用的不进行清理工作。在俄罗斯,由改过的机械研究会发明了一种装有独立吸盘的能够在墙壁移动的清洁机器人。
直到二十一世纪,也就是我们现在的时代。擦窗机器人已经逐步市场化,而且在潜移默化中进入了我们的家庭。
德国著名的研究所弗朗霍夫研究所一开始发明了一种用于火车站中火车隧道玻璃清洁的机器人,随后逐步衍生到用于高楼建筑,该机器人被取名为SIRIUS。在一定程度上节约了人工成本,保障了环境的美观整洁。
上面提到的其实还只能算是擦窗机器人的基础,而瑞士的一家名为SERBOT的公司则改造了上面这些擦窗机庞大的体积,发明了一种体积小方便的擦窗机。
它被取名为GEKKO,它可以说得上是世界上的一台用于商用市场清洁管理的玻璃清洁机器人。它的清洁速度最大可达约八米每分钟,在当时可以算得上是非常快了。它同样需要安装特定的牵引装置,而且只能对使用的大楼进行墙壁的清洁工作,它的出现可以说是又一大进步。
有了瑞士的例子擦窗机的研究方向便向小型化智能化的方向发展了。日本作为发达国家对在科技上的发明创造尤为重视,于是日本的研究人员在2003年至2006年之间先后发明了第一代和第二代小型擦窗机器人。这类小型机器人擦用的是真空吸盘或真空泵在玻璃表面进行吸附,也就是说擦窗机器人不再需要铺设轨道之类的。这类小型擦窗机器人具有良好的灵活性,它们能够在玻璃表面进行九十度的转向工作,对一些清洁死角能起到非常有效地作用。它的机体上装有履带或轮子,配合擦窗机器人自身存在的吸附力,这样起到了机器人自由运动的作用。可以说,日本创造的这类擦窗机器人小巧灵活而且工作效率还高。
我国对于擦窗机器人的研究起步稍晚于其他国家,但我们在中国对擦窗机器人的研究的重视绝对不低于其他国家。虽然我们中国的擦窗机器人研究才经过短短的二十多年,但我们就是凭借着这二十多年的研究取得了不小的研究成果。上海大学对于擦窗机器人的研究可以说得上是国内比较早的了,相当于该行业的领军人物。它们发明了一种借助于外接气源的,利用较为复杂的传动部件进行框架的驱动使其移动。这种机器人是把多层框架和真空吸盘组合起来的组合式机器人。
在2000年,著名的哈尔滨工程大学机器人研究所吸收了之前清洁机器人的经验。发明了一种利用风机抽取空气从而使该发明能够工作在较为光滑的玻璃上的一种机器。利用稳定的吸附力加上自身携带的清洁工具,该发明能够基本达到人们所想要的结果。
我国知名机器人企业科沃斯在这一领域有着长久的探索,也拥有这丰富的经验。科沃斯在单面擦窗机器人领域已开发出多个系列产品,不同系列具有不同的工作特点和技术特点。
在所有的设备中许多配置的达到吸附作用的装备是真空泵,而有些则是用风机来制造真空效果来作为吸附工具。它们是利用履带进行移动的,而且所有擦窗机器人的履带都是由硅胶材料制造的。擦窗机器人本身利用硅胶部分和擦窗布组合进行系统的清洁工作。科沃斯所产的机器人适用于家庭,在不断的研发中心最终也将适用于所有楼宇的清洁。
擦窗机器人技术还在不断的进步,上面所述只能代表过去不能代表未来。但是有了之前这些珍贵的经验,擦窗机器人技术在将来一定可以更上一层楼。
在未来,说不定擦窗机器人不需要吸附在玻璃上,采用一种飞行的机器人来完成工作。又或者说,在我的印象里动物界的壁虎可以趴在墙上行走。我们可以了解壁虎的身体结构及爬行原理,通过仿生学的概念来进行擦窗机器人的设计。也许这种想法已经被参考过来,但或许可能还没有。只要思考,就有更好地设计会出现。
1.4本课题的主要研究内容
这个设计的主要的重要部分是通过利用PLC的控制系统来研制楼宇擦窗机。擦窗机的控制系统结构、擦窗机在玻璃上的吸附、擦窗机对于边缘的感测以及擦窗机运动中遇到不光滑面时的面对措施以及后期对擦窗机的维护和保养等都是本课题研究的内容。
楼宇擦窗机器人作为一种既能方便家用用可用于公共场所使用的智能机器人,它方便了人们的同时也减少了人们高楼擦窗时消耗的人力以及人们需要承担的危险。擦窗机器人不仅在公共场合的视觉上让人感觉良好,它所提供的经济效益也是巨大的。楼宇擦窗机的研制可以说是新时代人类最伟大的创新之一,它既代表了人们对智能生活持支持的态度,又表现了我们祖国智能产业发展之迅速。
参考文献
[1]邹鹏,谢浩,恽奕翀.基于PLC控制系统的擦窗机器人运动控制系统设计[D].南京:南京科技职业学院,2017.
[2]FARSI M,RATCLIFF K,JOHNSON P J,ALLEN C R,KARAM K Z, PAWSON R.Robotics window leaning[J].Control'94 21-24March 1994.Conference Publication No.389,@IEE 1994.
[3]章一帆,胡莹.自动擦窗机器人的设计与研究[J].数字化用户,2003,(28)
[4]兰阳春,薛抱新.擦窗机设计概述[J].建筑机械化,2010,(7):4
[5]周延武,李光宗.擦窗机器人的智能化技术[J].机器人,2002,(24):6-11.
[6]ALLEN C,etc.Window cleaning apparatus[J].International Publication Number,WO 93/24044.
[7]De Carvaliho R N, Vidal H A, Vieira P, et al. Complete coverage path planning and guidance forcleaning robots[C]. Proceedings of the IEEE International Symposium on Industrial Electronics.NEW YORK, NY, USA: IEEE, 1997. 677-682.
[8]Zelinsky A, Jarvis R A, Byrne J C, et al. Planning paths of complete coverage of an unstructuredenvironment by a mobile robot[C]. Proceedings of International Conference on Advanced Robotics.NEW YORK, NY, USA: IEEE.1993. 533-538.
[9]Garcia E, De Santos P G. Mobile-robot navigation with complete coverage of unstructured environments[J]. Robotics and Autonomous Systems, 2004, 46(4): 195-204.
[10]Gradetsky V, Rachkov M. Wall climbing robot and its applications for building construction[J].Mechatronic Systems Engineering, 1990(1): 225-23 1
[11]谈士力,沈林勇,陈振华,等.垂直壁面行走机器人系统研制[J].机器人,1996, 18(4): 232-237.
[12]高学山.壁面清洗机器人及实用技术的研究[D].哈尔滨:哈尔滨工业大学,2002.
[13]王巍.灵巧擦窗机器人相关问题研究[D].北京:北京航空航天大学,2000.
[14]李恒,爬壁机器人动力特性研究及仿真分析[D].青岛:青岛科技大学2010.
[15]李开生,通用擦窗机器人控制系统体系结构的研究和实现[D].北京:北京工业大学,2001.



