






台虎钳三维机构及运动仿真
摘要:随着时代的不断发展,三维设计及运动仿真技术已经逐渐在现代产品设计方法中占据主导地位。在本论文中,利用UG软件来完成对台虎钳机构的三维设计和虚拟装配,并通过虚拟装配来进行装配的干涉检查,以及运动仿真来检验机构的运动是否符合预期要求,最后利用UG软件来完成工程图的绘制。
关键词:台虎钳机构;UG;三维造型;装配;运动仿真;
Vice three-dimensional mechanism and motion simulation
Abstract: With the continuous development of era, 3 d design and movement simulation technology has gradually dominated in the modern product design method.In this thesis, by using UG software to complete the vise body 3 d design and virtual assembly, and assembly interference, through virtual assembly and motion simulation to inspection agency sports meets the expected requirement, finally using UG software to complete the engineering drawing.
Key word: Vise institutions ; 3D modeling ; UG; assembly; motion simulation
目录
第一章 绪论..........................................................8
1.1 三维设计概述…………....................................................................................8
1.2 运动仿真在设计领域的运用………………………………...….....................8
1.3 本课题研究内容................................................................................................8
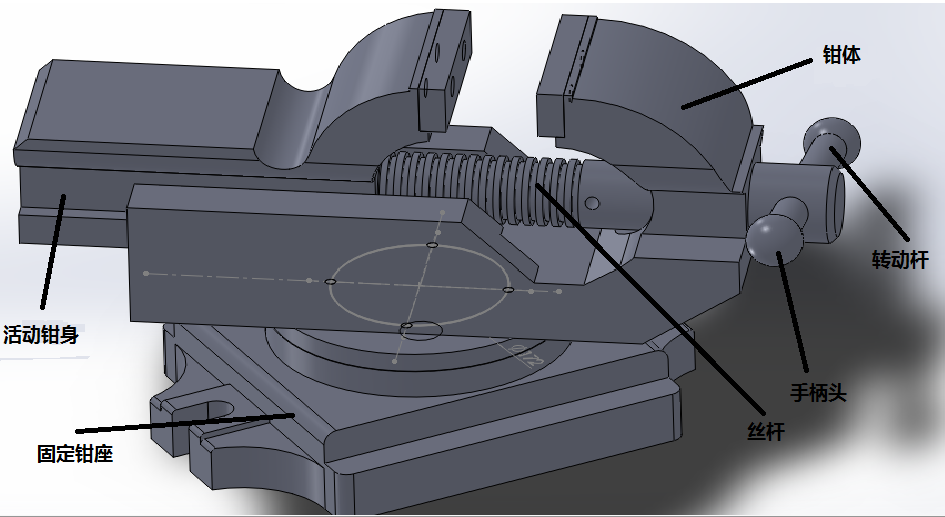
第二章 台虎钳机构的组成及工作原理....................................10
2.1 机构的组成......................................................................................................10
2.2 机构的工作原理..............................................................................................11
第三章 台虎钳的三维造型及虚拟装配........................................................................12
3.1 零件三维造型设计.................................................................................................12
3.1.1 固定钳座零件………………………………………………………...........13
3.1.2 钳体零件……………………………………………………………...........14
3.1.3 活动钳身零件...............................................................................................15
3.1.4 夹紧板零件…………………………………………………………...........16
3.1.5 转动杆零件 …………………………………………………………...…..17
3.1.6 丝杆零件.......................................................................................................17
3.1.7 手柄头零件...................................................................................................18
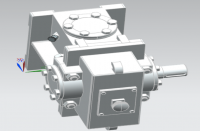
3.2 台虎钳机构的三维虚拟装配................................................................................19
3.2.1 装配结构分析...............................................................................................19
3.2.2 装配过程.......................................................................................................20
3.2.3 装配结果分析...............................................................................................26
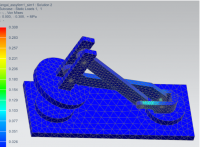
第四章 台虎钳机构的运动仿真..........................................27
4.1运动仿真介绍………………………………………………………………...27
4.2机构预期运动要求...........................................................................................27
4.3创建运动仿真………………………………………………………………...27
4.4创建连杆……………………………………………………………………...29
4.5构建运动副…………………………………………………………………...30
4.6定义驱动………………………………………………………………….......33
4.7新建解算方案并求解…………………………………………………….......34
4.8创建仿真动画及运动函数表…………………………………………….......34
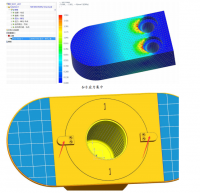
4.9运动仿真结果分析……………………………………………………….......34
第五章 创建工程图....................................................35
5.1 创建工程图介绍..............................................................................................35
5.2工程图创建方法………………………………………………………….......35
5.3零件二维工作图创建…………………………………………………….......37
第六章 结论…………………………………………………………………………………………………...............41
参考文献
参考文献
[1] 童秉枢.机械CAD技术基础[M].北京:清华大学出版社,2003.
[2] 濮良贵,纪名刚.机械设计.第七版[M].北京:高等教育出版社,2004.
[3] 王小华.机床夹具图册[M].北京:机械工业出版社,1991.
[4] 王辰宝.机械加工工艺基础[M].南京:东南大学出版社,1996.
[5] 孙本绪,熊万武.机械加工余量手册[M].北京:国防工业出版社,2004.
[6] 胡仁喜,温正,王渊峰.Solidworks 2007中文版标准教程[M].北京:科学出版社,2007.
[7] 侯书林,朱海.机械制造基础-机械加工工艺基础[M].南京:中国林业出版社,2006.
http://www.bysj1.com/html/7966.html
http://www.bysj1.com/html/7956.html



