





















基于西门子S7-1200 PLC及 PID 算法的 AGV 小车控制系统设计
摘要 AGV(Automated Guided Vehicle)是一种具有自动导航能力,能够进行
各种转移、装载任务的运输车。由于其极高的灵活性以及自动化程度,其在工业
上的应用可显著降低人工成本并提高工作效率。在工业化程度不断加深的今天,
AGV 小车系统的运用领域将进一步拓宽。因此 AGV 系统的研究具有重要的现实意
义。
本课题首先将介绍 AGV 技术的意义、国内外在此方面的发展现状以及课题期
望达成的目标。其次,介绍本设计目标系统的基本结构、工作原理和工作流程。
再次,按照预定目标完成 AGV 运输系统软件设计。由于 AGV 小车在运动过程中会
受到环境因素影响产生位置偏差,因此最后设计一种 PID 算法提高系统运行的精
确度。为实现对 AGV 小车及系统其它部件的控制,系统选用西门子 S7-1200PLC
控制器。
实验表明,本课题所设计的 AGV 小车系统可以实现正常仿真运行,能够模拟
实现磁导航式 AGV 小车在仓库与流水线之间的运输过程。由于时间紧迫以及疫情
原因,未能将程序应用到实际系统当中,这是本人今后期望能够有所突破的一个
方向。
关键词:AGV 小车 PLC PID
第一章 绪论
1.1 选题背景及意义
AGV 小车(Automated Guided Vehicle)是一种具备自动引导功能,以可充
电蓄电池为动力的无人自动导引运输车,是制造业、仓储业当中的一种重要设备。
随着生产力的发展,工业生产对于降低人工成本、提高作业效率的需求不断
提升,AGV 小车因此在工业领域得到大量应用,其高度的自动化水平、简易的装
配流程以及较低的维护成本等特征,有效地提高了生产效率。
因此,为了加强我国的技术创新能力、促进我国产业转型升级,应当重视对
AGV 小车系统的开发。
由于作业环境干扰,AGV 小车在运作过程中相较于预定运行轨迹会出现一定
的偏差。因此,为了达到 AGV 车身的行进角度以及运动轨迹与预设的路径保持一
致的目的,即让 AGV 小车的姿态反馈与姿态设定达到误差范围内的一致,需要引
入 PID 算法实现导航寻迹控制。
1.2 国内外研究发展现状
近年来,国内外对于 AGV 小车的研发技术已趋于成熟,但其仍然具备广阔
的发展空间。
由于各国工业化程度、经济的发展程度及文化底蕴不同,各国 AGV 的发展
模式也各有不同。
欧美国家为了降低设计成本,且能够采用模块化设计,降低了对于外观的重
视性,生产形式转向大部件组装,追求 AGV 更加高度的自动化。而日本的发展
模式则遵循简单实用的原则,注重于追求尽量减少客户收回投资成本的时间。该
模式生产出的产品一般应用于工作流程、运行路径单一的场合,且基本只采用简
单的磁带导引。
我国 AGV 小车,受制于技术原因,一般情况下无法在类似雨雪、雾天等相对
恶劣的环境下进行户外应用,所以室内应用仍是主流。国内目前对于 AGV 技术的发展方向有以下几个方面:
1.自动化充电 使得 AGV 小车具备无线充电能力,实现小车无间断运行,大
幅提高工作效率;
2.远程控制 方便远程终端对 AGV 小车进行操作,简化对 AGV 的操作流程。
3.制造模块化 集成 AGV 小车中各个模块的功能,简化小车整体结构,减少
组装成本;
4.制造网络化 由于 PC 系统的推广,AGV 小车有必要向开放式控制器方向转
变,提高兼容性与拓展性,方便远程通信。
为了迎合 AGV 应用最多的制造业与仓储业的现代化发展,AGV 小车需要融合
更多技术(例如:压力反馈、机器视觉等智能传感器技术)以实现用户更加简便
的操作与决策。
1.3 设计目标
一个简单的 AGV 小车系统应能够实现以下目标:①AGV 小车的正常运动;②
AGV 小车运动轨迹、方向的调整;③AGV 小车的启动、停止。由于小车作业外部
环境因素的干扰,以及小车自身设计时的尺寸误差,单纯的 AGV 小车系统在运行
时无法准确使小车按照预定轨迹前进。
本设计将模拟实现 AGV 小车在仓库与流水线之间的运输过程,即在简单 AGV
小车系统基础上加入通过传送带以及托盘进行运料、低速启动、循迹运行及报警
功能。同时设计一个 PID 控制算法设计方案,减小小车运行过程中的轨迹偏差。
最终目标是完成一个基于 PID 算法的 AGV 系统仿真。用户将可以通过 PLC 实现
AGV 小车在仓库与流水线之间的物资运送,且系统具备 PID 算法进行循迹。
1.4 论文思路
本文首先将介绍 AGV 系统的发展背景及发展意义,并介绍 AGV 小车的主要发
展模式以及国内外发展现状,说明本次设计所要实现的目标。其次,本文第二章
将介绍本 AGV 系统的基本结构与硬件设计,介绍 AGV 系统原理以及工作流程。第
三章将着重介绍 PID 控制的基本原理,提供一种 PID 控制 AGV 小车循迹运动的算
法设计方案。第四章主要介绍本次设计中 AGV 运输车运动的 PLC 程序,展示系统I/O 口分配以及定义的变量,并设计触摸屏组态。第五章将仿真测试系统的 PLC
程序以及触摸屏组态。
1.5 本章小结
本章作为绪论,首先简单说明了 AGV 系统设计的背景以及现实意义;其次,
描述了 AGV 技术的不同发展模式以及各国 AGV 发展现状、发展趋势;而后介绍了
本次设计的目标;最后简单概括了本文的思路。
目 录
第一章 绪论............................................................................................................................1
1.1 选题背景及意义...............................................1
1.2 国内外研究发展现状 ..........................................1
1.3 设计目标 ....................................................2
1.4 论文思路 ....................................................2
1.5 本章小结 ....................................................3
第二章 AGV 系统的硬件设计 ................................ 4
2.1 系统总体结构.................................................4
2.2 系统硬件设计 ................................................5
2.2.1 PLC 控制系统 ...........................................5
2.2.2 直流伺服电机驱动装置...................................6
2.2.3 磁引导装置.............................................7
2.2.4 人机界面..............................................10
2.3 硬件图设计 .................................................11
2.3.1 元器件清单............................................11
2.3.2 布局图................................................12
2.3.3 硬件接线..............................................12
2.4 本章小结 ...................................................13
第三章 PID 算法设计方案.................................. 14
3.1 PID 控制原理................................................14
3.2 PID 算法设计................................................16
3.2.1 设计思路..............................................16
3.2.2 AGV 循迹偏离算法 ......................................16
3.3 PID 循迹程序设计............................................19
3.3.1 TIA PORTAL 软件介绍 ...................................19
3.3.2 PID 程序 ..............................................19
3.4 本章小结 ...................................................22
第四章 PLC 程序设计 ..................................... 23
4.1 系统工作流程 ...............................................23
4.2 定义变量 ...................................................23
4.3 PLC 程序编写................................................24
4.3.1 程序总体结构..........................................24
4.3.2 PLC 程序 ..............................................25
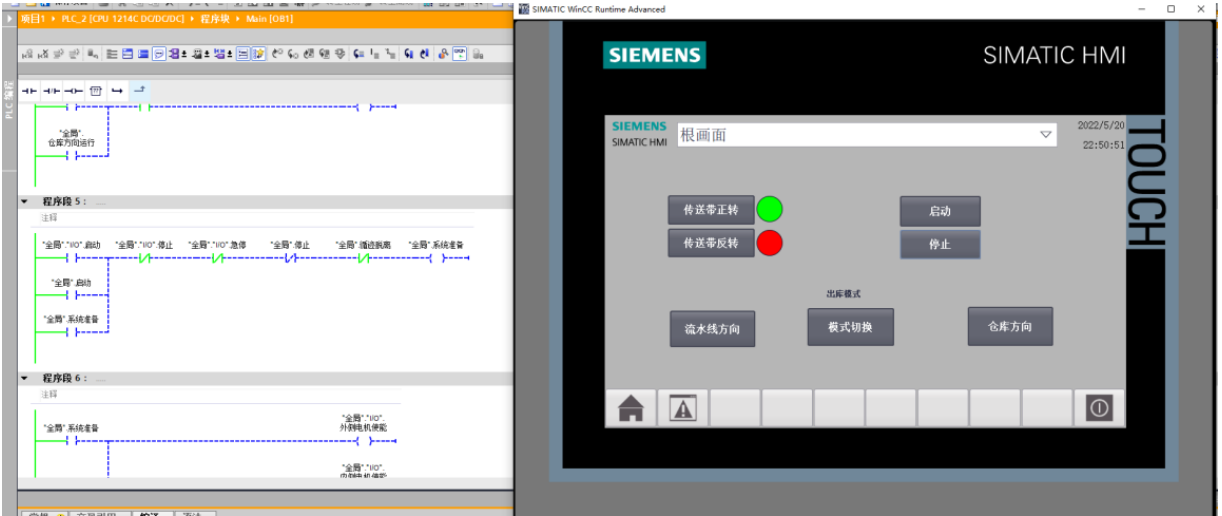
4.4 触摸屏组态设计 .............................................34
4.5 本章小结 ...................................................36
第五章 仿真测试 ......................................... 37
5.1 仿真目标 ...................................................37
5.2 AGV 小车运动仿真............................................37
5.3 AGV 循迹仿真................................................41
5.4 触摸屏组态仿真 .............................................44
5.4 本章小结 ...................................................47
结论.................................................... 48
致 谢 .................................................. 49
参考文献: ............................................... 50
附录 A .................................................. 51
附录 B .................................................. 52
参考文献:
[1] 耿牛牛. AGV 关键技术浅析[J]. 机电产品开发与创新. 2021.第 34 卷第 5 期:
77-78 页.
[2] 宋和义. AGV 导航的 PID 控制及影响因素探讨[C].中国汽车工程学会年会论
文集.2021:2617-2620 页.
[3] 金鑫. AGV 小车的发展现状与应用趋势[J].北京工业职业技术学院学报.2021.
第 20 卷第 1 期:10-11 页.
[4] 陈皓天. PID 控制在 AGV 循迹中的应用研究[J].新科技.2020:56-59.
[5] 张燕红主编;郑仲桥,张永春副主编.计算机控制技术第 2 版:东南大学出版
社.2014:第 79 页.
[6] 高平.基于 PLC 控制的 AGV 技术研究及其应用[J].新型工业化,2021,11(8):35-
36,71.
[7] 陈媛媛. PLC 控制 AGV 自动运送小车的设计[J].机械管理开发.2021 年第 11
期:212,222 页.
[8] 李模刚.一个 AGV 小车的智能控制系统设计与实现[J].工业控制计算机. 2021
年第 34 卷第 12 期:141-144 页.
[9] 王永红.重载 AGV 的应用现状及发展前景浅析[J].现代工业经济和信息
化.2021,11(09):145-146 页.
[10] 程松贵.速度自适应增量 PID 在 AGV 上的应用[J].机械工程师.2021,(07):118-
120 页.
[11] 南江萍.基于模糊 PID 的 AGV 转速控制系统设计[J].电子设计工程.2020 年
第 28 卷第 7 期:23-26 页.
[12] 杨利.基于循迹传感器和 PID 算法的 AGV 小车行进系统[J].电子设计工
程.2019 年第 27 卷第 13 期:148-152 页.
[13] 林桁. PLC 控制技术的介绍[J].工业技术.2016 年第 6 期:121 页.
[14] 孙宜敬.磁导航 AGV 车载控制系统的设计与应用[J].现代制造技术与装
备.2022 年第 2 期:190-193 页.
[15] 王耀辉. PID 控制原理简析[J].洁净与空调技术 CC&AC.2013 年 9 月第 3 期.



