












系统设计和补偿技术的应用
控制系统被控制用来执行特定任务。对控制系统的要求被称为系统的性能指标。它们通常和系统精度.相对稳定性以及响应速度有关。
一般,系统的性能指标不应该比该系统执行给定任务时所必须达到的指标更加苛刻。对于某一个给定的系统而言,如果稳态运行精度是最为重要的,那么,我们就不应该提出不必要的过高的暂态性能指标要求。满足这些过高的暂态性能指标往往需要昂贵的部件。我们应该牢记,控制系统设计过程中最重要的一个环节就是把性能要求精确的表达出来,这样才会着机出对于给定的任务而言最优的控制系统。
现在我们将简要的介绍使用频率响应法和根轨迹法对单输入但输出线性定常系统进行设计和补偿的方法。补偿是指改变系统的动态特性以满足给定的指标。
调节一个系统以得到满足性能的第一步是设定它的增益。在很多情况下,增加增益值将改善系统的稳态性能,但是也将使系统稳定性变差,甚至变的不稳定。于是必须重新设计系统(修改结构或者增加装置或部件),改变总体特性,使系统按照我们所希望的那样运行。
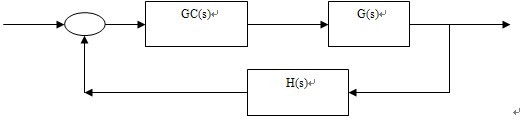
如图所示的结果中,补偿器GC(s)和被控对象串联连接。这样方法称为串联补偿。另外一种补偿是反馈补偿。串联补偿通常比反馈补偿简单。
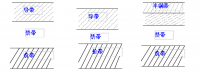
在讨论补偿器时,我们经常使用的术语是超前网络,或者滞后网络以及滞后-超前网络。如果一个正弦信号EI加到一个网络上,它的稳态输出EO(也是正弦信号)相位超前,则该网络称为超前网络。类似地,如果稳态输出EO相位滞后,则该网络成为滞后网络。在滞后-超前网络中,相位滞后和相位超前两种情况都会出现,但是出现在不同的频率范围内;相位滞后出现在低频段,相位超前出现在高频段。
控制系统设计的根轨迹法
根轨迹法是一种图解的方法。已知开环零点和极点的位置,当某个参数(通常是增益)的值从零变化到无穷大时,可以确定所有可能的闭环极点的位置。本方法清楚的显示出参数调节的效果。实际上,系统的根轨迹图表明,仅仅通过调节增益并不能获得理想的性能。于是必须改变根轨迹的形状来满足性能指标。
在设计控制系统时,我们可以通过插入一个合适的补偿器Gc(s)来改变原来的根轨迹(如图所示)。一旦完全理解了增加极点和/或零点对于根轨迹的影响,我们就可以很方便的确定补偿器零点极点的位置,以使根轨迹变成我们所希望的形状。在用根轨迹法设计的过程中,通过使用补偿器改变系统根轨迹的形状,以使闭环系统一对主导极点位于理想的位置。(通常,阻尼比和无阻尼自然震荡频率是由闭环系统一对主导极点的位置确定的。)
在开环函数传递中增加一个极点的效果是把根轨迹向右推,倾向于降低系数的相对稳定性,并且降低系统的收敛速度。增加一个零点的效果是把根轨迹向左推,倾向于使系统更加稳定,并且加快系统的响应。
当系统的性能指标以时域的量(如阻尼比及无阻尼的自然频率,最大超调量,上升的时间和调节时间)给出时,采用根轨迹实际是非常有效的。
当我们考虑一个设计问题。原系统要么对所有的增益值均不稳定,要么虽然稳定但是动态响应不理想。在这种情况下必须改变根轨迹的形状,以使闭环主导极点位于复平面的理想位置上。在前向传递函数中串联插入一个适当的超前不上器,就可以解决这个问题。
频率响应法控制系统设计
频域中的设计简单而直观。当开环系统由频率法设计完成以后,闭环的零点和极点就可以确定了。必须检查暂态响应特性,以确定设计的系统是否满足时域的要求。如果不满足要求,必须修改补偿器,重新分析,直到获得满意的结果。
频域中的设计主要有两种方法。一种是极坐标的图法,另一种是博德图法。用博德图法更方便一些。补偿器的博德图可以简单的加在原博德图上,因此画完整的博德图是很简单的事。而且,如果改变开环增益,幅值曲线上下移动,曲线的斜率不变,并且相位曲线也保持不变。
用博德图设计的常用方法是,我们首先调节开环增益以使稳态精度的要求得到满足。然后,我们画出还没有矫正的开环幅值曲线和相位曲线。如果对于相位裕度和幅值裕度的指标没有满足,就确定一个改造开环传递函数的合适的补偿器。
在很多情况下,补偿实际上是在稳态精度和相对稳定性之间做一个折中。为了获得较大的速度误差常数以及满足的相对稳定性,我们发现需要从新构造开环频率响应曲线。低频段的增益应该达到满足稳态精度要求。在中频段(从两个方向靠近幅频曲线的穿越频率WC),以确保得到适当的相角裕度。对于高频段,幅值曲线应该尽可能快的衰减,以减少噪声的影响。
超前补偿,滞后补偿和滞后-超前补偿的基本特性所后面所述。超前补偿对于暂态响应有明显的改进,对稳态精度改进较小。它可能加强高频噪声的影响。另一方面,滞后补偿明显提高了稳态精度,代价是增加了暂态响应时间。滞后补偿会抑制高频噪声信号的影响。滞后-超前补偿综合了超前补偿和滞后补偿两者的特点。
过程控制简介
过程控制系统 自动过程控制系统是指被控量为温度,压力,流量,成分等类型的过程变量保持在理想的运行值的系统。过程实际上是动态的。变化总是会出现,此时如果不采取相应的措施,那些与安全,产品的质量和生产率有关的重要变量就不能满足设计要求。
为了说明问题,让我们看一下热交换器。流体在这个过程中被过热蒸汽加热,如图2所示。
这一装置的主要目的是将流体由入口温度Ti(t)加热到某一期望的出口温度T(t)。如前所述,加热介质是过热蒸汽。
很多变量在这个过程中会发生变化,继而出口温度偏离期望值。如果出现这种情况,就该采取一些措施来校正偏差,其目的是保持出口温度为期望值。
实现该目的的一种方法是首先测量T(t),然后与期望值相比较,由比较结果决定如何校正偏差。蒸汽的流量可用于偏差的校正。就是说,如果温度高于期望值,就关小蒸汽阀来减小进入换热器的蒸汽流量;若温度低于期望值,就开大蒸汽阀,以增加进入换热器的蒸汽流量。所以这些操作都可由操作工手工实现,操作很简单,不会出现什么问题。但是,由于多数过程对象都有很多变量需要保持为某一期望值,就需要许多的操作员来进行校正。因此,我们想自动完成这种控制。就是说,我们想利用无操作人员介入就可以控制变量的设备。这就是所谓的自动化的过程控制。
为达到上述目标,就需要设计并实现一个系统。图3所示为一个可行的控制系统及其基本构件首先要做的是测量过程流体的出口温度,这一温度由传感器(热电偶,热电阻等)完成。将传感器连接到变送器上,由变送器将传感器的输出信号转换为足够大的信号传送给控制器。控制器接受与温度相关的信号并与期望值比较。根据比较的结果,控制器确定保持温度为期望值的控制作用。基于这一结果,控制器再发一信号给执行机构来控制蒸汽流量。
下面介绍控制系统中的4种基本原件,分别是:
1.传感器,也称为一次原件。
2.变送器,也称二次原件。
3.调节器,控制系统的“大脑”。
4.执行机构,通常是一个控制阀,但并不全是。其他常用的执行机构有变速泵,传送装置和电机。
这些原件的重要性在于它们执行每个控制系统中都必不可少的3个基本操作,即:
1.测量:被控量的测量通常由传感器和变送器共同完成。
2.决策:根据测量结果,为了维持输出为期望值,控制器必须决定如何操作。
3.操作:根据控制器的处理,系统必须执行某种操作,这通常有执行机构来完成。
如上所述,每个控制系统都有M,D和A这3种操作。
有些系统的决策任务很简单,而有些很复杂。设计控制系统的工程师必须确保所采取的操作能影响被控变量,也就是说,该操作要影响测量值。否则,系统是不可控的,还会带来许多危害。
自动过程控制的重要术语 定义自动过程控制领域的一些术语很有必要。第一个是个被控变量。它是指必须为此或控制在某一期望值的变量。在前面的例子中,过程出口温度T(t)即为被控变量。第二个是设定值,被控变量的期望值。控制变量是用于将被控变量保持在设定值的变量。在上例子中,蒸汽流量是控制变量。最后,任何被控变量偏离设定值的变量称为干扰或扰动。在图17.1所示的换热器中,可能的扰动有入口温度Ti(t),入口流量q(t),蒸汽质量,环境条件,流体的成份和结构等。在加工工业中,自动化的过程控制通常需要扰动的存在,明确这一点很重要。如果没有扰动,设计运行条件不变,那就没有必要不停的对过程进行“调节”。
重要的术语还有下面这些。开环是指被控过程和分离器的情况,即控制器并不采取任何操作将被控变量维持在设定值。开环控制中存在的另一种情况是,控制器产生的动作对检测没有影响。在控制系统的设计中,这是主要的缺点。闭环控制是控制器被连在过程中,被控变量与设定值比较后产生校正作用。
根据这些定义的概念,自动过程控制系统的任务可以阐述如下:一个自动过程控制系统的让任务是在出现扰动时利用控制量将被控量维持在设定值。
调节和伺服控制 在一些过程中,被控量由于受到干扰而偏离一个固定的设定值。调节控制是指设计系统来补偿扰动。在其他一些情况下,最主要的干扰是设定值本身,即设定值随时间而变化(典型的是批处理过程),被控变量必须随设定值而变化。伺服控制就是为此目的而设计的控制系统。
在工业过程中,调节控制比伺服控制更普遍,但其基本设计方法实际上是一样的。因此,自动过程控制中有许多的原理对两者都适用。



