












MC33033高性能单片直流无刷电机控制器的设计
引言
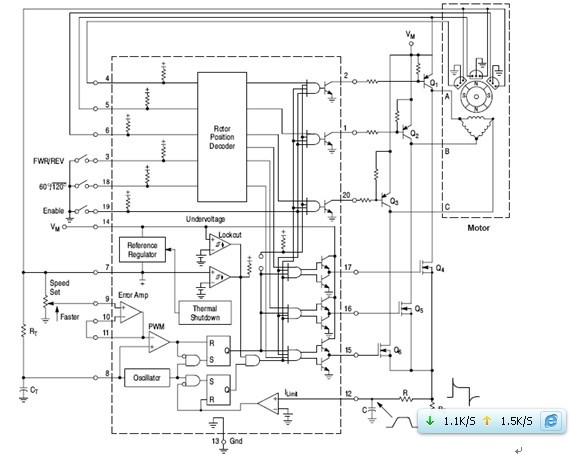
MC33033 是安森美出品的高性能单片直流无刷电机控制器系列之一。它包括了实现一个有限特征,开环,三相或四相电动机控制系统所需的全部功能。该器件采用双极型模拟工艺,在任何恶劣的工业环境条件下都能保证高品质和稳定性。MC33033 含一个应用于正确整流时序的一个转子位置译码器,可向传感器的一个温度补偿参考电平,一个频率可编程锯齿波振荡器,一个完全可以访问的误差信号放大器。一个脉宽调制器比较器,三个集电极开路顶端驱动输出和三个非常适于驱动功率场效应管的大电流图腾柱式底部输出器。
MC33033 内置的保护特性包括欠压锁定,由锁定关断模构成的逐周期限流以及内置热关断保护。典型电机的控制功能还包含开环速度控制,正向或反向旋转和运转使能。此外,MC33033 还有-60度 / 120度 选择管脚,可以设置转子位置译码器使之适合于60度 或120度 的传感器电气相位输入。图1为管脚连接图:
图1管脚连接图
管脚功能描述:
管脚 符号 描述
1 , 2 , 20 Bt ,At, Ct 这三个集电极开路顶端驱动输出设计用于驱动外部上部功率开关晶体管。
3 正向/反向 正向/反向输入用于改变电机转向
4 , 5 , 6 SA , SB , Sc 这三个传感器输入控制整流序列。
7 参考输出 此输出为振荡器定时电容Ct提供充电电源并为误差放大器提供参考电压。它也可负责向传感器供电。
8 振荡器 振荡频率由定时元件Rt和Ct选择的参数值所确定。
9 误差放大器同向输入 此输入通常情况下连接到速度设置电位器。
10 误差信号放大器反向输入 在开环应用情况下,此输入通常连接到误差放大器输出。
11 误差放大器输出/P WM 输入 在闭环应用情况下,此管脚用作补偿。
12 电流检测同向输入 在一个给定的振荡器周期中,一个相对于管脚13 为100 毫伏的信号中止输出开关导通。通常此管脚连接至电流检测电阻的上端。
13 地 该管脚为控制电路提供一个分离的接地返回,并可以作为参考返回至电源地。
14 Vcc 此管脚为控制1C 的正电源。当Vcc 在10 伏到30 伏的范围内,控制器均可正常工作。
15 , 16 , 17 CB,BB,AB 这三个图腾柱式底部驱动输出被设计用于直接驱动外部底部功率开关晶体管。
18 60/120 选择 此管脚的电气状态决定控制电路工作在60度 (高电平状态)或120度 (低电平状态)传感器电气相位输入。
19 输出使能 此输入为逻辑高电平时,电机运转,为低电平时电机停转。
1.功能描述
转子位置译码器
内置转子位置译码器监控三个传感器输入(管脚4 , 5 , 7 )以提供顶端, 底部驱动输入的正确时序。传感器输入被设计为直接与集电极开路类型霍尔效应开关或者光开槽耦合器连接。包含了内置上拉电阻以使所需的外部器件最少。输入与门限典型值为2 .2 伏的TTL 电平兼容。MC33033 系列被设计用于控制三相电机,并可在最常见的四种传感器相位下工作。提供的60度 / 120度选择(管脚18 )可使MC33033 很方便地控制具有60度, 120度 , 240度 ,或300度 的传感器相位的电机。对于三个传感器输入,有八种可能的输入编码组合,其中六种是有效的转子位置,另外两种编码组合无效,通常是由于传感器线的开路或者短路所致。利用六个有效输入编码,译码器可以在使用60 度电气相位的窗口内分辨出电机转子位置。
正向/反向输出(管脚3 )通过翻转定子绕组上的电压用来改变电机转向。当输入改变了状态,一个指定的传感器输入编码从高电平变为低电平(例如100 ) ,具相同字母标识的可用顶部和底部驱动输出将互相转换。实际上,整流时序被反向,电机改变旋转方向。电机通/断控制由输出使能(管脚19 )实现,当该管脚开路时,连至一正电源的内置上拉电阻将会起动顶部和底部驱动输出时序。接地时,顶端驱动输出关闭并且底部驱动强制为低,使电动机停转,在图2中表示出换向逻辑真值表,在半波电动机驱动应用中,不需要顶端驱动输出,典型情况为令其不连接。
图2 三相六步换像器真值表
注:1 V=六个有效传感器或驱动组合中的任何一个
X=无须关心
2 数字输入(管脚3 , 4 , 5 , 6 , 18 , 19 )均与TTL 电平兼容。电流检测输入(管脚12 )相对于管脚13 有一个100mV 的门限电压。此输入逻辑O 定义为<85 毫伏,逻辑1 为>115 毫伏
3 顶部驱动输出为集电极开路设计,仅在低电平(0)伏态有效。
4 当60度/120度 (管脚18 )在高态时,配置是针对60度传感器相位输入的,当管脚18 处低电平(0)状态时,配置是针对120度传感器电气相位输入。
5 有效的60度或12度 传感器的组合对应相应的有效顶部和底部驱动输出。
6 无效传感器输入;全部顶部和底部驱动为关断。
7 有效传感器输入当使能=0;所有顶部和底部驱动为断开状态。
8 有效传感器输入当使能和电流检测均为1 时;所有顶部和底部驱动为断开状态。
误差放大器
提供高性能,全补偿误差信号放大器,具有可访问输入和输出端(管脚9,10 ,11)用来使闭环电机速度控制更易实现。放大器具有80dB 典型直流电压增益,0.6MHZ 增益带宽,以及较宽的共模输入电压范围,可以从地扩展至Vref 。在大多开环速度控制应用中,放大器被设置为单位增益电压跟随器,其同向输入连接到速度设置电压源。
振荡器
内置锯齿波振荡器的频率可由定时元件R T和C T选择的参数值来确定。电容C T由参考输出(管脚7) 通过电阻RT充电并由一个内部放电晶体管来放电。锯齿波峰值的典型值为4.1V,谷值为1.5V。为了在声频噪声和输出转换效率两者之间取得一个更好的折衷,推荐的振荡器频率在20至30KHZ范围内。参考图1以选择元件。
脉冲宽度调制
脉宽调制的使用提供了一种控制电机转速的能量节省方法。该方法在换向时序的过程中,通过区别施加到每个定子绕组上的平均电压而实现。当C T放电时,振荡器设定两个锁存器,并允许顶端和底部驱动输出导通。当CT的正向锯齿波变得比误差
图3 PWM时序图
信号放大器的输出大时,PWM 比较器将复位上部锁存器并终止底部驱动输出的导通。在图(3)中表示出脉宽调制器时序框图。仅当底部驱动输出时脉宽调制器才对速度控制有效。
电流限制
严重过载的电机持续使用将导致过热甚至烧毁。上述损坏情况最好通过使用逐周电流限制来防止。即每一个导通周期当作一个分离的事件。逐周电流限制可由监控每次输出开关导通时定子电流的建立实现,并且当检测到一个过电流条件时立刻关闭该开关,并使其在振荡器的锯齿波上升周期的剩余时间里保持关闭。
定子电流通过接入一个对地参考检测电阻RS 转换成电压,该电阻与三个底部开关晶体管(Q4,QS,Q6)串联。检测电阻上的电压受电流检测输入(管脚12)监控,并与内部100mV 参考电平作比较。如果超过了电流检测门限,比较器复位低锁存器,并终止输出开关导通。检测电阻值为:
双锁存器PWM 配置可保证不管是否被误差放大器的输出或电流限制比较器端接,在任何给定振荡周期中只存在一个单输出导通脉冲。
参考电平
片上6 . 25V 稳压器(管脚7 )提供振荡器定时电容的充电电流,误差放大器的参考电平,同时也能为低电压应用提供20mA 电流以直接向晶体管供电.在更高电压应用中,必需转移IC 外稳压器耗散的功率。附加一个外部旁路晶体管而轻易实现,若V ref - Vbe:超过温霍尔效应传感器过热所要求的最小电压,选择-6.25V 的参考电平可采用更简单的NPN 型电路实现。选择合适的晶体管,适当的散热片,可以获得最大为1 安的负载电流。
欠压锁定
双重欠压锁定引入器件以防止损坏IC 和外部功率开关晶体管。在低功率电源情况下,可以保证IC 和传感器正常工作以及足够高的底部输出电压。IC 的正电源被监控为8.9V 的门限。当器件接驳标准功率MOSFET器件时,此电平保证了必需的足够栅级驱动能力以获得低的RDS(on )。若直接利用参考电平向霍尔传感器供电,一旦参考输出电压小于4.5V,会导致不正确的传感器操作。若一个或两个比较器检测到欠压条件,顶部驱动被关闭,底部驱动输出保持为低电平状态。比较器中都包含滞后,以防止在它们各自的门限交叉时产生振荡。
驱动输出
三个顶部驱动输出(管脚1,2 ,20)均为集电极开路NPN 型晶体管,在30V 的最小击穿电压下可灌入50mA 的电流。三个图腾柱式底部驱动输出(管脚15 ,16 ,17)非常适合于N 沟道场效应管和NPN 双极型晶体管直接驱动。每个输出都可获得高达100mA 的灌拉电流。
热关断
提供了内置热关断电路,当超过最大结温时保护IC 。在典型值170度 时被激活,IC 就像稳压器被禁用一样,随后关断IC 。
2.系统应用
三相电机换向
图4 中所示的三相应用为具有全波六步驱动的一个开环电机控制器。上部功率开关三极管为达林顿PNP型,下部功率开关三极管是N 沟道功率MOSFE 丁。每个器件均含一个内置寄生箱位二极管,可以将定子电感能量返回至电源。该输出能驱动三角型连接或离型连接的定子,如果使用分离电源,也能驱动中线接地的Y型连接。
在任意给定的转子位置,仅有一个顶部和底部功率开关(属于不同的图腾柱)有效。配置使定子绕组的两端从电源切换到地,可使电流为双向或全波的。
前沿尖峰通常在电流波形中出现,并会可导致限流错误。通过在电流检测输入处串联一个RC 滤波器抑制尖峰。RS 采用低感型电阻也可以有助于减小尖峰。
图5显示一个三相三步半波电机控制器。此配置由于仅有一个功率开关电压降与给定定子绕组串联,因而极适于汽车和其它低压应用。因为每个绕组只有一端可切换,所以电流为单向或半波。定子回扫电压由一个单齐纳管和三个二极管箝位。
三相闭环控制器
MC33033 自身可用于开环电机速度控制。对于闭环速度控制,MC33033 要求输入一个正比于电机速度的电压。一般这可以通过转速计所产生电机速度反馈电压实现。图6 显示出采用MC33039 的应用,MC33039 由MC330336 的6.25伏参考电平(管脚7)供电。MC33039 可以产生所需的反馈电压,而无需昂贵的转速计。被MC33033 用作转子位置译码的霍尔传感器输出信号同样可被MC33039 使用。在任何一条传感器线上,每一个霍尔传感器信号的正或负的跳变,都可以使MC33039 产生一个有一定幅度和持续时间的脉冲,其参数由外部电阻R1 和电容C1确定。在MC33039 的管脚5 处的输出脉冲串被MC33033 的误差放大器(预置为积分器)积分,以产生一个直流电平,该电平与电机速度成正比。此与速度成正比的电压在MC33033 电机控制器的管脚11 处建立PWM 参考电平,并闭合成反馈环路。MC33033 输出驱动一个TMOS 功率MOSFET 3 相电桥。在启动期间和当电机改变转向时,可能产生大电流。
图6 所示系统为120/240 度霍尔传感器电气相位的电机所设计。通过除去MC33033 管脚18 的跳线(J1),可以很方便地使系统适用于60/300 度霍尔传感器电气相位。
传感器相位比较
在三相电机中,有四种约定来建立传感器信号的相对相位。对六步驱动来说,每60 一度电气相位输入信号改变一次,而相关信号相位往往依赖于机械的传感器位置。
图4 三相六步全波电机控制器
图7中表示出各种电气相位约定的比较。从传感器相位表(图8)中注意到,相位60度 时输入编码的次序与300度 相位的相反。这意味着,当60度/120度 选择(管脚18)和正向/反向(管脚3 )都处于高电平态(开路)时,MC33033 使60度 传感器相位电机正向运转。在同样条件下,300度传感器相位电机的运行相同,只是反向运转。如果要使300度电机正向运转也很容易,只需转换正向/反向开关(正向/反向开关闭合)即可。同样的区别也存在于120度 和240度 的约定中。
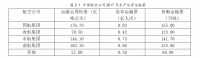
本数据表中,由于转子机械位置是转子磁极数的函数,转子位置总是以电气角度形式给出。两者关系如下:
给定机械转速,磁极数目的增加会导致更大的电气转数。通用三相电机典型具有一个四极的转子,可以得出电气转数是机械转速的2 倍。
布线考虑因素
请不要在绕接或插入式样机板上构建任何电机控制电路,高频印制电路布线技术对防止脉冲抖动要求极为重要。通常由于加在电流检测传感器或误差信号放大器输入端的过量噪声引起。印刷电路布局应包括一个具有小电流信号和高驱动和输出缓冲地的接地面,并通过分别的通路返回至电源输入滤波器电容VM 。
在VCC,Vref 和误差放大器同向输入端是否需要在靠近集成电路处接一个瓷介电容,视电路布局而定。这为滤除任何高频噪声提供了低阻电路。所有大电流回路应尽可能短,并使用粗铜线走线以降低辐射EMI。
图5 三相、三步、半波电机控制器
图6 闭环无刷直流电动机控制器
图7 传感器相位比较转子电器位置(度)
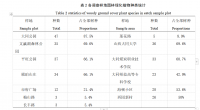
图8 传感器相位表



