


液压挖掘机铲斗设计
液压挖掘机工矿分析
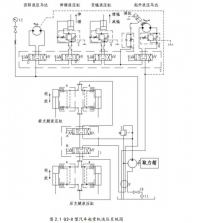
液压挖掘机的主要运动功能包括以下几个动作[5][6]:动臂升降、斗杆收放、铲斗装卸、转台回转、整机行走以及其它辅助动作,如图2-1所示。除了辅助动作(例如整机转向等)不需全功率驱动以外,其它都是液压挖掘机的主要动作,一般要进行全功率驱动研究。挖掘机的典型作业流程:
(1)整机移动至合适工作位置;(2)平台回转,使工作装置处于挖掘位置;(3)动臂下降,并调整斗杆、铲斗至合适位置;(4)斗杆、铲斗挖掘作业;(5)动臂升起;(6)回转工作装置至卸载位置;(7)操纵斗杆、铲斗卸载。
图2-1 液压挖掘机的工作运动
1-动臂升降;2-斗杆收放;3-铲斗装卸;4-转台回转;5-整机行走
由于液压挖掘机的作业对象和工作条件变化较大,对主机的工作有两项要求:①实现各种主要动作时,随着阻力与作业速度的变化,要求液压缸和液压马达的压力和流量也能相应变化;②为了充分利用发动机功率,缩短作业循环时间,工作过程中往往要求有两个主要动作(例如挖掘与动臂下降、提升与回转)同时进行复合动作。
液压挖掘机一个作业循环的组成和动作的复合主要包括:
(1)挖掘:通常以铲斗液压缸或斗杆液压缸进行挖掘,或两者配合进行挖掘。因此,在此过程中主要是铲斗和斗杆的复合动作,必要时,配以动臂动作。
(2)满斗举升回转:挖掘结束,动臂液压缸将动臂顶起,满斗提升,同时回转液压马达使转台转向卸载位置,此时主要是动臂和回转的复合动作。
(3)卸载:转到卸载位置时,转台制动,用斗杆液压缸调节卸载半径,然后铲斗液压缸回缩,铲斗卸载。为了调整卸载位置,还要有动臂液压缸的配合,此时是斗杆和铲斗的复合动作,兼以动臂动作。
(4)空斗返回:卸载结束,转台反向回转,动臂液压缸和斗杆液压缸配合,把空斗放到新的挖掘点,此时是回转和动臂或斗杆的复合动作。
(5)整机移动工况:将整机移动至合适的工作位置。
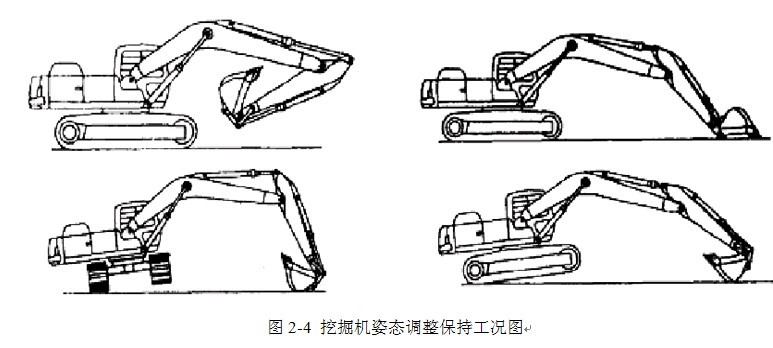
(6)姿态调整与保持工况:满足停放、运输、检修等需要。
(7)其他辅助作业工况:辅助工作装置作业工况。
2.1.1 典型挖掘工况
液压挖掘机典型的挖掘工况包括如下3种。[23][24]
(1)铲斗挖掘工况:由铲斗液压缸单独动作进行挖掘的工况,采用铲斗液压缸进行挖掘常用于清除障碍,挖掘较松软的土壤以提高生产率,因此,在一般土方工程挖掘中(III级土以下土壤的挖掘)铲斗挖掘最常用。
(2)斗杆挖掘工况:由斗杆液压缸单独动作进行挖掘的工况,在较坚硬的土质条件下工作时,为了能够装满铲斗,中小型液压挖掘机在实际工作中常以斗杆液压缸进行挖掘。
(3)联合挖掘工况:由铲斗、斗杆液压缸复合动作进行挖掘的工况,必要时还需配以动臂液压缸的动作。主要用于需要轨迹控制的情况。
当单独采用铲斗液压缸进行挖掘时,挖掘轨迹以铲斗与斗杆的铰点为中心,铲斗斗尖所作的圆弧线的长度决定铲斗液压缸的行程。以铲斗液压缸进行挖掘时的挖掘行程较短,为了能够装满铲斗,需要有较大的挖掘力以保证能挖掘较大厚度的土壤,所以一般挖掘机的斗尖最大挖掘力都在采用铲斗液压缸挖掘时实现。
当单独采用斗杆液压缸进行挖掘时,挖掘轨迹以动臂与斗杆的铰点为中心,铲斗斗尖所作的圆弧线的长度决定于斗杆液压缸的行程。当动臂液压缸位于最小长度并以斗杆液压缸进行挖掘时,可以得到最大挖掘深度尺寸,并且也有较大的挖掘行程。
图2-2 斗尖直线挖削 图2-3 地面的切削和压整
a-水平地面的挖削;b-斜坡地面的挖削 a-水平地面的切削;b-斜坡地面的切削
一般认为斗容量小于0.5m3在土质松软时以转斗挖掘为主,否则以斗杆挖掘为主。这两种情况的挖掘阻力不同。
在实际挖掘工作中,往往需要采用各液压缸的复合工作。如在平整土地或切削斜坡时,需要同时操纵动臂和斗杆,以使斗尖能沿直线运动,见图2-2所示。此时斗杆收回,动臂抬起,需要保证彼此动作独立,相互之间无干扰。如果需要铲斗保持一定切削角度并按照一定的轨迹进行切削时,或者需要用铲斗斗底压整地面时,就需要铲斗、斗杆、动臂三者同时作用完成复合动作,这些动作决定于液压系统的设计,见图2-3所示。当进行沟槽侧壁掘削和斜坡切削时,为了有效地进行垂直掘削,还要求向回转马达提供压力油,产生回转力,保持铲斗贴紧侧壁进行切削,因此需要回转机构和斗杆机构复合动作。
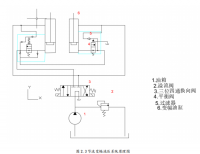
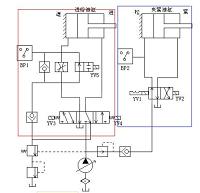
单独采用斗杆挖掘时,为了提高掘削速度,一般采用双泵合流,个别也有采用三泵合流。单独采用铲斗挖掘时,也有采用双泵合流的情况。
当动臂、斗杆和铲斗复合运动时,为了防止同一油泵向多个液压作用元件供油时动作的相互干扰,一般三泵系统中,每个油泵单独对一个液压作用元件供油较好。对于双泵系统,复合动作时各液压作用元件间出现相互干扰的可能性大,因此需要采用节流等措施进行流量分配,流量分配要求和三泵系统相同。
挖掘过程中还有可能碰到石块、树根等坚硬障碍物,往往由于挖不动而需要短时间增大挖掘力,希望液压系统能暂时增压,能提高主压力阀的压力。
2.1.2 满斗举升回转工况
满斗举升回转的运动约占整个作业循环时间的50%~70%,能量消耗占25%~50%,回转液压回路的发热量占液压系统总发热量的30%~50%,因此要求尽可能地缩短转台的回转时间。
挖掘结束后,动臂油缸将动臂顶起,满斗举升,同时回转液压马达使转台转向卸载处,此时主要是动臂和回转马达的复合动作。动臂抬升和回转马达同时动作时,要求二者在速度上匹配,即回转到指定卸载位置时,动臂和铲斗自动提升到合适的卸载高度。由于卸载所需的回转角度不同,随液压挖掘机相对卸载的位置而变,因此动臂提升速度和回转马达的回转速度的相对关系应该是可调整的。卸载回转角度大,则要求回转速度快些,而动臂的提升速度慢些。
回转起动时,由于惯性较大,油压会升得很高,有可能从溢流阀溢流,此时应该将溢流的油供给动臂。在回转和动臂提升的同时,斗杆要外放,有时还需要对铲斗进行调整。这时是回转马达、动臂、斗杆和铲斗进行复合动作。
2.1.3 卸载工况
回转至卸载位置时,转台制动,用斗杆调节卸载半径和卸载高度,用铲斗油缸卸载。为了调整卸载位置,还需要动臂配合动作。卸载时,主要是斗杆和铲斗复合动作,兼有动臂动作。
2.1.4 空斗返回工况
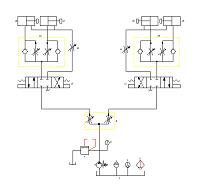
当卸载结束后,转台反向回转,同时动臂油缸和斗杆油缸相互配合动作,把空斗放在新的挖掘点。此工况是回转马达、动臂和斗杆复合动作。由于动臂下降有重力作用,压力低、变量泵流量大、下降快,要求回转速度快,因此该工况的供油情况为一个油泵的全部流量供回转马达,另一油泵的大部分油供给动臂,少部分油经节流阀供给斗杆。
发动机在低转速时油泵供油量小,为防止动臂因重力作用迅速下降和动臂油缸产生吸空现象,可采用动臂下降再生补油回路,利用重力将动臂油缸无杆腔的油供至有杆腔。特点与满载回转类似,但转动惯量比满足时减小。
2.1.5 整机移动工况
挖掘机一般不作长距离行走,只在工地范围行走,作业时用来调整整机位置。基本要求:左右履带可独立操纵,可调速,具有直线行走功能,具有一定的行走速度(2~5km/h)和爬坡能力(坡度大约在35o左右),具有制动能力。
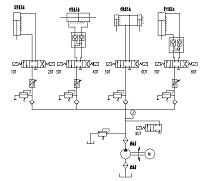
在行走的过程有可能要求对作业装置液压元件(如回转机构、动臂、斗杆和铲斗)进行调整。在双泵系统中,一个油泵为左行走马达供油、另一个油泵为右行走马达供油,此时如果某一液压元件动作,使某一油泵分流供油,就会造成一侧行走速度降低,影响直线行驶性,特别是当挖掘机进行装车运输或上下卡车行走时,行驶偏斜会造成事故。
为了保证挖掘机的直线行驶性,在三泵供油系统中,左右行走马达分别由一个油泵单独供油,另一个油泵向其它液压作用元件(如动臂、斗杆、铲斗和回转)供油。对于双泵系统,目前采用以下供油方式:①一个油泵并联向左、右行走马达供油,另一个油泵向其他液压作用元件供油,其多余的油液通过单向阀向行走马达供油;②双泵合流并联向左、右行走马达和作业装置液压作用元件同时供油。

微信

QQ1:3097331788 QQ2:2601997959 QQ3:2993773635



