



机器人打包线液压系统设计
摘 要
随着人类科技的飞速发展,金属资源对于各国来说也变得越加重要。对现有的金属资源的过渡开采和不合理使用的,造成了大量的金属浪费。这自然而然的引起了人们的担忧,因而,废金属的回收再利用的课题也成了工业发展中必不可少的研究方向。
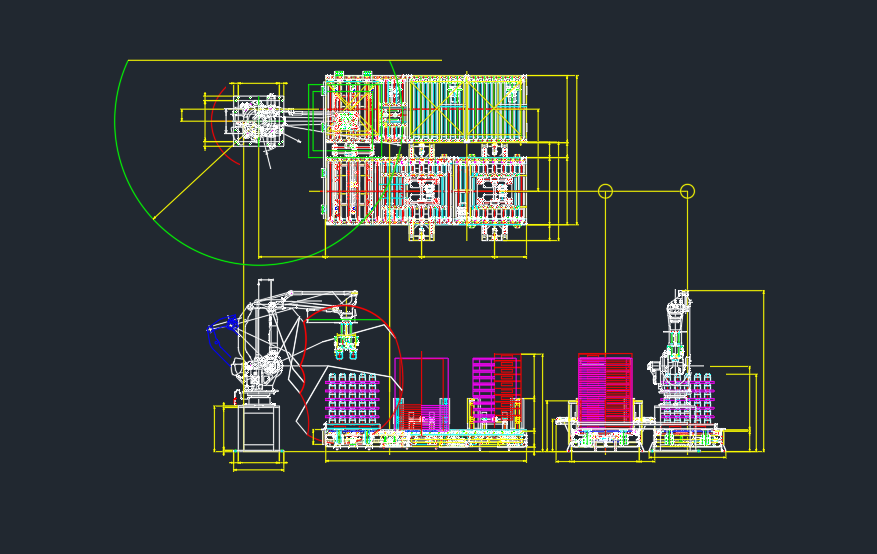
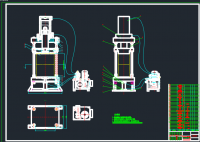
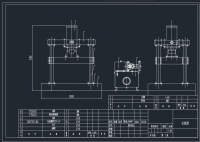
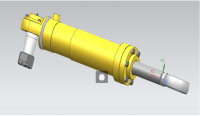
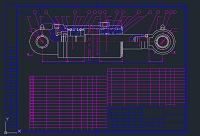
本设计的主要内容是液压缸和机构的设计、选型,金属机器人打包线液压原理图,电气原理图以及叠加阀的设计、选型。本设计中,主、侧液压缸为机器人打包线提供压缩动力,替代了传统的丝杆。主液压缸安置在压缩室后端面,侧压缸安置在压缩室左侧面。液压缸的设计包括了缸筒、活塞、导向套、活塞杆等的设计计算,以及密封圈、防尘圈、活塞与缸筒、活塞杆密封方式的选型。压缩室的设计主要是用来确定尺寸大小并且对其强度校核。本金属机器人打包线除了主、侧液压缸外,还有上盖、锁紧机构、前门三个辅助液压缸,它们分别控制着上盖的闭合、锁紧机构的进退、前门的开合。
本设计完成了上述液压缸和机构的设计、选型,金属机器人打包线液压原理图、电气原理图以及叠加阀设计选型。整个机器人打包线不但制造成本低,而且企业的广泛需要,拥有很好的市场前景。
关键词:废金属的回收、金属机器人打包线、液压
ABSTRACT
With the rapid development of science and technology, industrial production has become an inevitable trend of the development of automation. Metal resources is also becoming increasingly important for countries. The transition of the existing metal resources mining and unreasonable use of, and are responsible for a large number of metal waste. This naturally caused concern, therefore, scrap metal recycling project has become essential to industrial development and the research direction. The design of the hydraulic metal baling press use hydraulic pressure to compress with packaging, metal scrap has a certain size, convenient transportation, recycling and recycled scrap metal, in order to put into production again. So greatly improve the utilization rate of the metal, the process of the waste is in a certain extent, ease the intense demand for metal resources.
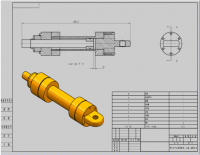
The main content of this design is the design of the hydraulic cylinder and institutions, selection, metal baling press hydraulic principle diagram, electrical principle diagram and superposition valve design, type selection. In this design, the main hydraulic cylinder, side provide compression power for packing machine, replacing the conventional screw. The main hydraulic cylinder face after placed in the compression chamber, lateral pressure cylinder placed in the left lateral compression chamber. The design of the hydraulic cylinder includes cylinder, piston, guide sleeve, piston rod etc. The design and calculation, and the sealing ring, dust ring, piston and cylinder, piston rod sealing mode selection. The design of the compression chamber is mainly to determine the size and intensity. This metal baling press in addition to the main hydraulic cylinder, side, and on the cover, locking mechanism, the front three auxiliary hydraulic cylinder, respectively control with lid closed, in a locking mechanism, the front door open and close. And three auxiliary cylinder and the main work, side two cylinder each cross movement.
This design completed the hydraulic cylinder and institutional design, selection, metal baling press hydraulic principle diagram, electrical schematic diagram and superposition valve design selection. Some of its operations to achieve automation, which improve labor efficiency, reduce labor intensity. The baling press not only manufacturing cost is low, and enterprise need to extensively, have good market prospects.
Key words:Scrap metal recycling、Metal baling press、hydraulic pressure
目 录
摘 要 I
ABSTRACT II
目 录 III
第1章 引 言 1
1.1 文献综述 1
1.1.1课题研究背景 1
1.1.2 课题研究的意义 2
1.2 设计内容简介 2
1.2.1 研究解决的问题 2
1.2.2整体设计方法 2
1.3 本章小结 3
第2章 机器人打包线主体的设计分析 4
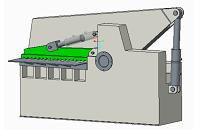
2.1 机器人打包线的结构设计 4
2.1.1机器人打包线的运动 4
2.1.2机器人打包线的总布局 4
2.2 机器人打包线压缩室的设计与强度校核 6
2.2.1 压头的强度校核 6
2.2.2 压缩室的设计 6
第3章 机器人打包线液压系统的设计 9
3.1 液压系统的特点 9
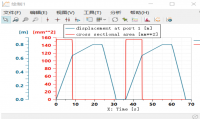
3.2 液压系统工况分析 9
3.2.1分析系统工况 9
3.2.2确定液压系统的主要参数 10
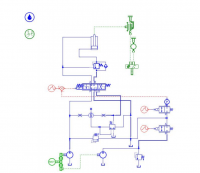
3.3 拟订液压系统原理图 11
3.3.1确定供油路线 11
3.3.2液压回路的设计 11
3.3.3 拟订液压系统图 12
3.3.4液压系统原理图的分析设计 12
3.4 液压系统的计算和液压元件的选定 14
3.4.1液压缸的设计计算 14
3.4.2 选择液压元件 19
第4章PLC控制系统设计 23
4.1 PLC控制器的选择 23
4.2 系统控制要求 23
4.3 I/O点数的确定 24
4.4 画电气原理图 24
总 结 26
参考文献 27
致 谢 28
第1章 引 言
1.1 引言
1.1.1课题研究背景
几乎所有的机器人打包线都是一个原理:使要加工的材料在不被破坏的条件下,经过设备的压缩、打包,让原本散乱、占空间大的材料变成统一规格的小体积、比重大且容易集装回收与运输的包块。机器人打包线目前分为金属和非金属机器人打包线这两种。本次设计选择适用于各种金属及其相应制品材料的和打包。在本文中,包装机的设计属于前者,废金属经过打包压缩后可以降低回收的成本,提高经济效益。
工业进程的飞速发展,使得废金属的量大大的增加,所谓的废金属包括废包装物、边角余料、切屑、线材等等一些不可直接再进行生产的金属物料。
而现在,小部分的废金属加工设备只在大型的冶金企业中才具备,其余大部分的废金属加工设备服务于再生资源回收利用公司或者基层回收站。也就是说虽然金属资源的过度浪费虽然引起了国内企业的担忧,但还是没有引起足够的重视。
对比国外,我过的机器人打包线机械产品数量和种类上都比较少。国外的机器人打包线机械产品已经走上节能、智能和高等科技化的道路。而国内从引进废金属机器人打包线到现在已经有20余年,机器人打包线械的发展仍没有跟上工业进程的步伐。在科技发展过程中,金属打包产业发展趋向势必是:
1)高效化、
2)机电一体化
3)自动化、智能化
从现有的信息,目前拥有和使用的金属包装机分为两类:螺杆驱动和液压驱动,删除简单和替换的机器。现在,丝杆传动的金属机器人打包线几乎已经从市场上淘汰掉了,这是由于丝杆传动跟摩擦压机的某些缺点一样,而且丝杆传动的丝杆要求精度高,这将致使丝杆传动不能较好地发展;而用液压传动的金属机器人打包线则具备了上述丝杆传动所没有的优点,用液压传动的机器人打包线传递压力大、工作效率高、速度能够自动控制等。
1.1.2 课题研究的意义
4)留意我们的周边环境,容易觉察到,各个企业工厂的金属废料料和日常生活中遗弃的金属制品都日益增加,这是工厂企业在飞速发展和人们生活质量越来越高的原因。然而,这自然就给我们的周围的环境和社会的发展带来举足轻重的影响。随着经济和科技的不断发展,许多矿产资源也将慢慢减少。因此,怎样处理金属废料,不仅要杜绝对环境的破坏,还要废物回收利用,可持续的资源发展,就变成我们的重点研究按方向。机器人打包线在国民经济中发挥着不可替代的作用,这是因为它能实现对金属废料的打包回收再利用,前景开阔。
上述是 从基本的意义上出发的,变废为宝、资源再利用是必须要的。但是,我们现在面临更多的是如何让回收的成本降得更低,回收的效率提得更高。现在国外的机器人打包线正在朝着智能、自动、高效化发展。国内对新产品的研究的缺乏动力、财力使得现今的机器人打包线技术处于落后的不良状况。日益激烈的竞争让企业的自主研究成果无法让大众分享,而相关部门又没有科研经费的投入。让这一领域的空白没法填补。
根据上述的情形,本文研究设计的金属机器人打包线与过去的机器人打包线相比,是具有一定研究意义的。
1.2 设计内容简介
1.2.1 研究解决的问题
传统的包装机械设备包括传动机构、动力系统以及工作机构。机器运动的能源来自动力系统;而机器的运行是靠传动机构来实现的;然而传动机构的作用是为了让动力源满足运行机构对速度、力、和其他运行功能要求的装置。
1)初始数据:
(1)公称推力:1150KN
(2)压缩室尺寸:1100×650×550mm
(3)包块尺寸(长×宽×高):(240-350)×250×250mm
(4)包块密度:≥ 1800kg/m3
(5)生产效率:950-1200kg/h
1.2.2整体设计方法
1)金属机器人打包线主体的设计
(1)机器人打包线机体的设计
(2)压缩室的设计
①压缩室的尺寸设计
②进行弯曲强度校核
2)液压系统的设计
(1)液压泵的选择
(2)提供能实现足够流量以及压力适当的液压油泵当中液压源的产生机构
(3)液压缸及控制油路的设计:
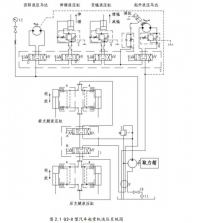
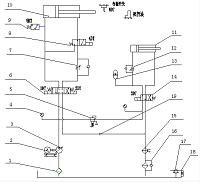
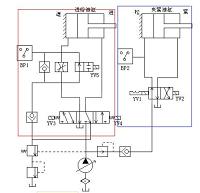
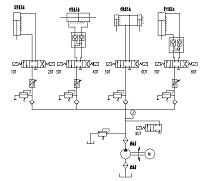
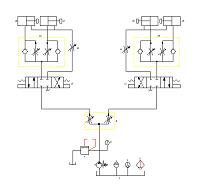
要求能实现如下工作过程:启动后,上盖缸自动合上→锁紧机构锁上→主缸快进达到一定位置后切换为工进→当主缸压力达到一定值后,主缸保压→侧缸快进,达到一定行程后切换为工进→当侧缸压力达到一定值后,侧缸保压→保压一定时间后,主缸泄压,侧缸回到起始位置→锁紧机构松开→上盖打开→前门打开→主缸将包块推出压缩室→主缸快退回到初始位置→前门关上→进行下一次填料。
(4)辅助装置的确定:
采用以上提到的各个部位相互连接通道和接口。
3)单片机的控制线路设计以及编程
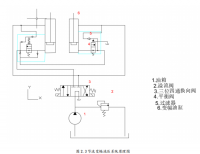
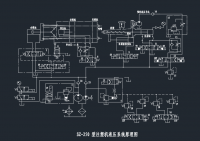
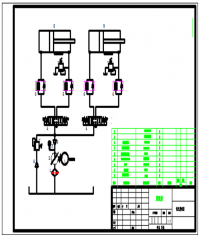
(1)液压原理图的设计
(2)选择单片机的控制器
在选好了对应单片机和操作对象后,实现下面几个操控过程:
① 上盖打开,填入待加工的金属废料;
② 上盖合上,用锁紧机构来锁住上盖;
③ 主缸快进,一定行程后工进,到一定压力后保压;
④ 侧缸同主缸;
⑤ 主缸泄压,锁紧机构松开,上盖和前门都打开;
⑥ 主缸快进,把包块由前门送到压缩室;
⑦ 主缸快退,前门关上,等候下一次填料并且进行包装。
参考文献
[1] 杨培元.液压系统设计简明手册[M].机械工业出版社,1998
[2] 骆简文,雷宝荪,张卫主编.液压传动与控制[M].重庆大学出版社,2000
[3] 陈榕林,陆同理.新编机械工程师手册[M].中国轻工业出版社,2003
[4] 桂国森.液压元件产品样本[M].机械工业出版社,2000
[5] 成大先.机械设计手册(第三版)[M].北京化学工业出版社,1994
[6] FLUID POWER CONTROL Edit by John F.Blackburn,Gerhard Reethof,J.Lowen Shearer 1960。
[7] 机械工程手册编辑委员会编.电气工程师手册[M].北京机械工业出版社,1987
[8] 齐占庆.机床电气自动控制[M].机械工业出版社,1987
[9] 户主贤.机床液压传动与控制[M].北京航空专业教材编审室,1984
[10] 上海煤矿机械研究所编.液压传动设计手册[M].上海人民出版社,1990
[11] 陈在平,赵相宾.可编程序控制器及应用程序控制[M].机械工业出版社,2002
[12] 刘鸿文.材料力学[M].高等教育出版社,1999
[13] Yeaple F.Fluid Power Design Handbook. 2nd Ed Revised and Expanded. New York and Basel: Marcel Dekker Inc,1990。
[14] 煤碳工业部主编.液压传动设计手册 [M].上海科学技术出版社,1998
[15] 蔡春源.机电液设计手册[M].东北大学,机构工业出版社,1999
[16] 黎启柏.液压元件手册[M].机械冶金工业出版社,2000
[17] 徐灏.机械设计手册(第5卷)[M].机械工业出版社,1998
[18] 杜国森.液压元件产品样本[M].机构工业出版社,2000
[19] 成大先.机械设计手册第三版(第四卷)[M].化学工业出版社,2002



