





避障智能小车的设计制作
摘要:近年来,随着科学技术的发展,智能机器人已经开始在现代社会的各个领域中被运用,在地底挖掘,海底探索,太空揭秘等情景下发挥了巨大了作用,同时在日常的生活之中为工作,学习乃至衣食住行都带来莫大的便利,为人类的发展带来了福音,是开拓人类未来道路的可靠工具,有着让科学家纷纷投身其中的巨大潜力和光明的前景。本课题研究的避障智能小车便是智能机器人其中的一种,智能小车的优势在于可以代替人类在人类肉体难以胜任的艰难处境中完成任务,它可以适应恶劣的环境,不受湿度、温度、重力等条件因素的影响,根据任务的需求的不同也可以为它修改自身的大小形态以满足条件,从智能小车发展到现在,已经逐步深入到农业、工业以及社会生活的各个方面。智能小车的种类十分繁多,本文研究的是红外线避障小车,其研究目的主要是针对在高危环境下的工作要求,智能小车在错综复杂的环境的行进中进行及时避障,以及恶劣环境中正常运作是物资运输的基础需求。本文将避障智能小车作为主要研究的内容,其原理是基于红外传感系统,实现自动避障功能,在调整的模式中能够做到在预定的环境中自动的运作,无需人为管理便可满足既定目标。设计采用对比选择,模块独立,综合处理的研究方法,结合试验得出的具体结果对比方案优劣根据实际情况选出最佳方案进行实验设计,整个过程将严格按照科学严谨的态度完成。通过调试和检测各模块运作情况,从而得到正确的信号输出,实现其应有的功能,最后将各个调试成功的模块结合到小车的车体上,结合程序,通过单片机的控制,将各模块有效整合到一起,达到预期的目标,完成最终设计与制作,能使小车最终能在特定的环境下只能化的运转。
关键词:智能小车、避障、单片机
Design and Manufacture of
Intelligent Obstacle Avoidance Car
Abstract:In recent years, with the development of technology and science, intelligent robots have started to be used in every area in modern society, the underground mining, underwater exploration, such as space reveal scenario played a huge role, at the same time in the daily life for work, study and even food and clothing live line bring great convenience, brought good news for the development of human beings, is to develop the human future road of reliable tools, has let scientists involved huge potential and bright prospect.This topic research the obstacle avoidance of the smart car is one kind of intelligent robot, the advantages of the smart car can replace human in the human body is difficult to competent for the plight of complete the task, it can adapt to the harsh environment, not affected by humidity, temperature, gravity condition factors, such as different according to the requirements of task can also be modified for it themselves in order to meet the conditions, the size of the form from the smart car development up to now, has been gradually into the agriculture, industry and all aspects of social life.There are various types of intelligent cars. This paper studies infrared obstacle avoidance cars. The research objective is to meet the work requirements in high-risk environments.In this paper, the obstacle avoidance intelligent car is taken as the main research content. Its principle is based on the infrared sensing system, to achieve automatic obstacle avoidance and tracking functions, in the mode of adjustment can achieve automatic operation in the predetermined environment, without human management can meet the established goal.The design adopts the research method of comparative selection, independent module and comprehensive treatment. The advantages and disadvantages of the scheme are compared according to the specific results of the experiment. The best scheme is selected according to the actual situation for the experimental design.Through the test and detection module operation, get the correct output signal, realize its function, and finally combines various debugging success module on car body, combined with the program, through the single-chip microcomputer control, to effectively integrate various modules together to achieve the desired goal, complete the final design and production, can make the car finally can in certain circumstances can only run.
Keywords:Intelligent car、obstacle avoidance、single-chip microcomputer
目录
一、绪论 3
1.1课题的选题背景 3
1.2研究目的和意义 3
1.3课题国内外研究现状 5
1.4课题研究结果 6
二、智能小车的总体设计 7
2.1系统方案设计 7
2.2检测系统论证 8
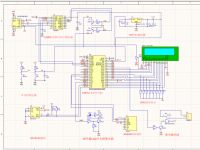
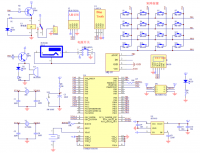
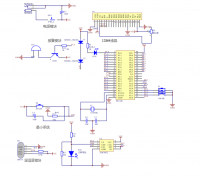
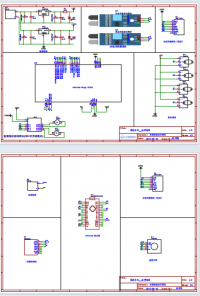
三、智能小车的硬件设计 9
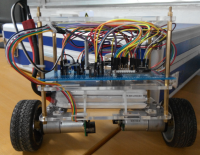
3.1实物设计 9
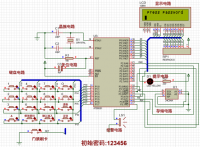
3.2主控制器 9
3.3避障模块 10
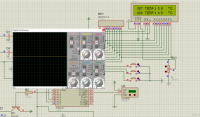
3.4电机驱动模块 12
3.5电源模块 14
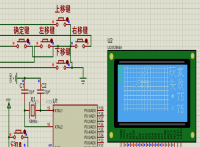
3.6显示模块 14
3.7小车的整体设计 15
四、智能小车的软件设计 16
4.1系统控制流程 16
4.2电机驱动设计 17
4.3避障模块设计 17
五、智能小车的系统调试 19
5.1电路调试 19
5.2避障功能测试 19
六、总结与展望 21
小结与致谢 22
参考文献 23
一、绪论
1.1课题的选题背景
早在上个世纪60年代,斯坦福研究院的研究员就开发出了第一代移动机器人,可以利用传感器原件简单地识别环境信息,并具有逻辑推理功能[1]。计算机相关技术的快速发展,使得传感器技术的研究也越发深入,人们对移动机器人展开了火热地研究。80年代开始,各个国家、研究院的精英,甚至许多顶尖的公司都被吸引,并积极参与研究。90年代以后,相继发明出了许多有价值的机型,迅速引起了全世界的高度重视。随着移动机器人的技术愈发成熟,其已经具有自主识别、决策等能力,是高度智能化的产物。发展至今,移动机器人已经可以帮助人类在高危、恶劣的环境中自主工作,完成指定任务。
移动机器人在多个领域的应用都取得了让人满意的成果。如在军事上,能执行勘察敌情,搜索目标,勘测雷区等危险任务,大幅降低了人员的伤亡;在医学上,可以在手术中辅助医生完成复杂并且精细的手术,避免人为的失误;在深海、太空探索领域,能在人类无法行为的无氧环境中,及时捕捉和反馈有用的信息,并完成任务,极大推动了人类对于未知领域的探索脚步。在农业、矿产、共产自动化等方面的应用同样带来了巨大的经济利益,减轻了人类的压力,提高了劳动生产效率。
智能小车就是移动机器人的一种,它是移动机器人研究领域的一个重要组成部分。现如今许多工业部门都在广泛运用智能小车技术,该技术比人类在特定环境可靠性更高,且价格低廉,最适合在人类无法工作的环境中工作。智能小车技术正慢慢融入我们的社会生活中,今后也定会发挥更大的作用。
1.2研究目的和意义
汽车的发展自上世纪八十年代以来迎来了猛烈地发展,为人类的出行提供了新的选择,为方便的出行找到了答案,汽车的制造与设计水平在这样的环境下达到了一个前所未有的高度,但与此同时,因为人民日益增长的物质需求,汽车数量的逐渐增加,汽车所带来的问题也在不断考验着人类,拥堵的交通,突发的事故,以及高能耗使用汽车所带来的环境污染都是一直以来需要解决的难题,所以提高车辆的安全系数,开发紧急情况的应对装置,解决交通事故的发生率是全球各国重点关注的社会问题。
人类为了开拓美好的未来总是努力地推动文明的进步,智能小车的开发便是对此最好地诠释。近些年,计算机技术和自动控制技术迅速地发展,智能小车的潜力也不断地被发掘。智能移动机器人作为现代高科技的集成体,发展至今,已经到了第三代。
第一代是程序控制型机器人,此种机器人主要是依靠以下两种方式进行工作的。第一种是在设计师存储在内部存储器的预设程序和工作流程的控制下进行工作。第二种是示教再现的方式,首先由人引导机器人操作,再由机器人记住其操作的程序与要领,将整个工作流程全都记录在内部储存器,在第二次使用的时候机器人便会按照示教的内容再现动作。这代机器人在对象与所处环境发生改变的时候,便需要重新编程与示教才能正常工作。
第二代是自适应机器人,这种机器人身上会安装相应的各类传感器(如视觉,触觉,听觉等等),机器人开始拥有了自己的“感觉”,因此机器人可以依靠所有的传感器去感受环境的变化,获得自身的位移,速度等参数,并且这些参数经由机器人内部自身的计算机分析,处理形成一个反馈的闭环,对机器人的动作形成控制。这代机器人具备了一定的适应环境能力,但还是需要技术人员的协调工作。
第三代是智能机器人,和前俩代相比,它装备了更强大的高灵敏度传感器,拥有超过一般人的视觉,听觉,嗅觉,触觉的能力,基本能满足人类拥有的感官。更重要的是它能够拥有自己的“思维”,它能够识别,采集外部环境的信息,控制自己的行为,自主地完成各种困难的任务,并且具有自我学习,归纳,总结,提高已掌握知识的能力。
历经三代机器人的发展,人类对于自动化与智能控制技术不断的更新与发展,再加上全球各国对于交通拥堵,车祸事故及环境污染问题的重视程度不断加深,智能汽车的发展是大势所趋,也是我国目前需要深入研究的项目,作为多学科交叉领域的智能机器人项目,智能小车已经逐渐成为了衡量国家科学技术强盛的标准之一,因此对其开展进一步的研究是迫切而又必要的。
1.3课题国内外研究现状
智能车的概念产生于上个世纪二十年代,人们在三十年后开展了一系列的研究。在上个是世纪五十年代,世界上第一台具有智能意义的车辆被创造出来了,是美国巴雷特电子公司开发出来的自动导引车系统AGV[2],该系统只是一个基于拖车的货运平台,其适用范围仅限于货物运输的仓库,最基本的功能就是无人驾驶,这类移动机器人的开发,使得全球各国都对此投入了大量人力物力。大规模的投入带给这一科学领域大规模的发展,这一阶段,世界上主要发达国家都对智能车辆的开发进行了有效的研究。上个世纪六十年代,欧洲的普罗米修斯计划开始在这一领域探究。在亚洲,1996年成立的辅助驾驶学院,旨在研究实现车辆自动导航技术的方法,促进智能汽车技术日本全面进步。到二十世纪九十年代,美国大学卡耐基梅隆大学的机器人研究所研发了navlab系统[3],德国的vamors-p[4]车辆系统、意大利的ARgo系统等。法国INRIA公司花费了大量的时间,人力物力进行无人驾驶汽车的研究,最终无人驾驶汽车“塞卡博”(cycab)诞生了。这辆车只需要你设定好既定线路,就能够让你到达最终的目的地,除此之外,他还有强大的功能,可以让你在手机上进行操作。德国的智能车“shelley”能识别各种交通标志,可以无人驾驶在复杂的城市公路上。目前防撞系统,自动泊车系统等技术也开始试用于高级轿车上,这些技术提高了汽车的智能化水平和汽车驾驶的安全性,为社会贡献了巨大的力量。
相比于其他发达国家来说,国内对智能汽车的研究起步时间稍晚,科研水平与国外存在一定的差距,发展也不是很成熟,但是在我国科研人员的不断努力下,仍旧取得了不小的成果。在上世纪八十年代,我国的第一架智能汽车ATB-1诞生了,这使得我国终于踏进了智能汽车的研究领域,随后的ATB-2、ATB-3都是在一代的基础上进行改进制造的自主地面车辆。国内代表性的典型系统包括:第三代自主地面车辆ATB-3,国防科技大学研制的无人驾驶车辆CITAVT-IV及“红旗”自主轿车[5-6],清华大学的THMR-V型智能车辆[7],吉林大学的JUTIV系列Cybercar智能车辆[8],重庆大学的CQAC-I型智能车辆等。此外,上海交通大学、湖南大学、北京理工大学、军事交通学院、合肥工业大学、中国科学研究院等对智能车开展了研究,并且获得了相当不错的成果[9-12]。然而,国内对智能车的研究还处于实验室阶段,想要将智能车真正行驶在城际公路和城市道路上,投入到交通中,还有许多问题等待着我们去解决。追根究源,主要原因是智能车设计本身难以与其他车辆形成实时有效的交互与协同[13]。
1.4课题研究结果
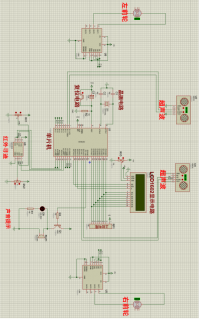
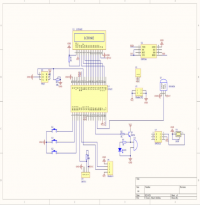
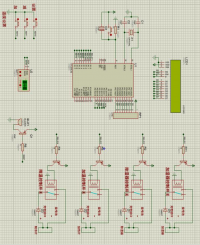
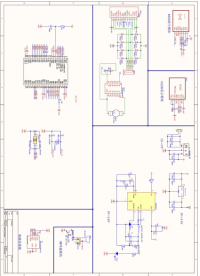
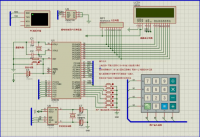
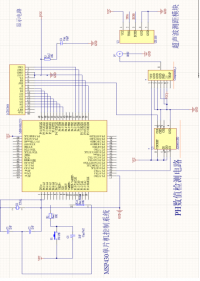
本文所述的小车是一种自动行驶、自动转向、调节速度、躲避障碍的基于STC89C52单片机的避障智能小车。能够在给定的区域内按照预设的路径自动进行行驶与探测。小车整体由驱动模块、控制模块和传感器模块组成。
研究内容主要是设计智能小车的避障模块,结合多个传感器的信息,使得小车自行分析行驶路径。最后通过实验方式对小车各个功能模块进行测试分析,测试小车在行驶过程中的稳定性。
参考文献
[1]朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010,7:961-967.
[2]Eric M,Margaret L. An Analytic Model for Design of a Multicar Automated Guidedcar System[J].Management Science,1993,12:1477-1489.
[3]Pomerleau D,Jochem T.Rapidly adapting machine vision for I automated carsteering[J].IEEE expert,1996,2:19-27.
[4]Rudolf Gregor, M. Lützeler, M. I Pellkofer,etc.Siedersberger Ernst Dieter Dickmanns.EMS-Vision: A Perceptual System for Autonomous cars[J].IEEE Transactions onIntelligent Transportation Systems,2002,1:48-59.
[5]孙振平.自主驾驶汽车智能控制系统[D].北京:国防科学技术大学,2004.
[6]孙振平,安向京,贺汉根.CITAVT-IV视觉导航的自主车用机器人[D].北京:国防科学技术大学,2002.
[7]张振武,丁冬花.THMR-V道路检测算法设计[J].微计算机信息,2005,25:15-22.
[8]彭新荣,杨明,谢强德,一种基于可靠预约ALOHA的智能多车协作通信协议[J].上海交通大学学报,2010,9:1211-1216.
[9]安吉尧,文桂林,卢远志.等用于车辆自主导航的多传感器数据融合方法[D].湖南:湖南大学,2009.
[10]陈无畏,车进,王檀彬.等视觉导航智能车辆的路径跟踪预瞄控制门[J].门机械工程学报,2008,10:277-282.
[11]徐友春,常明,刘洪泉.猎豹智能车无人驾驶系统总体设计[J].汽车工程,2006,12:1081-1085.
[12]徐友春,章永进,王肖.智能车的研究现状与发展趋势:第六届中国智能交通年会[J].暨第七届国际节能与新能源汽车创新发展论坛,2011,7:28-32.
[13]陈明妙,李曼.基于STC89C52单片机的智能循迹小车的设计[D].湛江:湛江师范学院,2013.
[14]Hong,Yang.Design and Implementation of Mobile Car with Wirel Video Monitoring Systerm Basedon STC89C52[J].Sensor&Transducers,2015:261-267.
[15]张祥.基于单片机的药品仓库温湿度短信报警系统设计与实现[D].大连:大连海事大学,2013.
[16]赵吉涛.基于嵌入式系统的移动机器人数字路标识别[D].河北秦皇岛:燕山大学,2012.
[17]Hiroki,Position Detecting during Asparagus Spear Harvesting[J].Engineering in Agriculture,Environment and Food,2013,3:105-110.
[18]陆斌.自动避障和火焰搜索在智能灭火机器人中的实现[J].工业控制计算机,2012,2:105-106.
[19]张兆惠.基于微控制器的智能车系统的开发研究[EB/OL].www.cajcd.edu.cn/pub/wml.txt/980810-2.html,1998-08-16.
[20]朱利洋.基于单片机的智能寻迹系统设计[D].杭州:浙江工业大学,2011.



