





















基于西门子PLC的机械手设计
摘 要
机械化和自动化已经完全融入了我们当今现代化的社会。已到处可见。自动化已成为现在企业的重要的支柱,如无人车间、无人生产线等,随着工业现代化的进一步开展,同时,我们的生产还要种种生产环境,如高温,放射性。对人和生态环境有害的气体和蒸气,水等,这些欠好的生产环境,有害于人们的实际操作。工业机器人技术人是当代化自动控制范畴中的一项不行缺少的新兴技能。它是工业生产自动化与当代控制实践相互联合的一种产品。特别是在高温、高压、粉尘、噪音和放射性等等污染场所。工业机械手是进步生产进程自动化、革新劳动条件、提高产风和生产效率的有益的要领之一,更普遍地利用。在中国最近几年来,有一个敏捷快速的生长,并取得了肯定的结果,尤其是机器人行业和铁路行业部门。
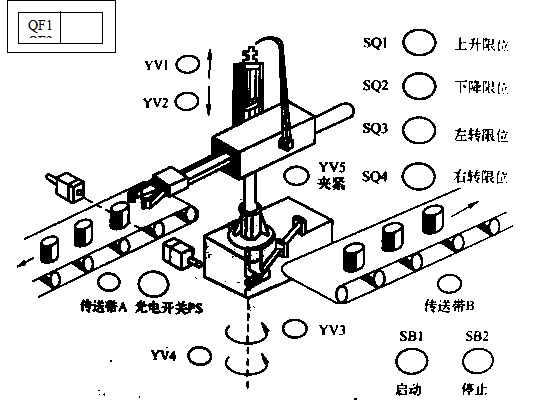
德国的西门子公司在PLC上,对机器人的高低控制,左、右和抓拿运动。滚珠丝杆、导轨、机械爪和放置的机械局部,把相应的硬件设备配合好。由交换电机、变频器、控制台等构成,控制机械手实现种种要领,我们采取可编程的种种技术。
关键词:PLC;控制;机械手;梯形图
Abstract
Mechanization and automation have fully integrated into our modern society. Has been everywhere. Automation has become an important pillar of enterprises now, such as unmanned workshop, no one production line, with the further development of modern industry. At the same time, the recent production also need all kinds of production environment, such as high temperature, radioactive, and the ecological environment of harmful gases and steam, water, etc., these owe good production environment, harmful to people's actual operation. Industrial robot technology is not a lack of contemporary change automatic control category of new skills. It is the contemporary industrial automation and control practice mutual joint of a product. Especially in high temperature and high pressure, dust, noise and radioactive pollution. Industrial manipulator is production process automation progress, innovation, working conditions, improve the productivity of the wind and useful one of the main point, more widespread use. In recent years in China, there is an agile rapid growth, and achieved certain results, especially the robot industry and the railway industry sector.
German Siemens on the PLC, level control of robot, left, right and take exercise. Ball screw, guide rail, machinery claws and placed locally, the corresponding hardware equipments. By the exchange of motor, inverter, console, etc, to control the manipulator to realize all the essentials, we take the programmable technology
Keywords: PLC ; control ; manipulator;ladder diagram
目录
第一章 序言 1
1.1机械手的意义 1
1.2 为什么 1
第二章 XXX工艺设计 2
2.1XXX 2
2.1.1XXX 2
2.1.2XXX 2
2.2 XXX 2
第三章 XXX参数确定及计算 3
3.1 硬件选择 3
3.1.1 XXX 3
3.1.2 XXX 3
3.2 XXX 3
第四章 XXX夹具设计 11
4.1 XXX 14
4.1.1 XXX 14
4.1.2 XXX 15
4.2 XXX 16
第N章 结论 23
致 谢 24
参考文献 25
毕业设计附录目录 26
参考文献
[1] J H Kim.Cooperation Multiagent System:From the Rpbot soccer PerspecTive[J]. proc.
Mirosot’97,June,1997:5—16.
[2] 裘华徕. 气动技术的近期发展及其影响因素[J]. 液压气动与密封.2002,1(3):1—3.
[3] 姜继海等.液压与气压传动[M].北京:高等教育出版社,2002.3.
[4] 王永昌, 潘先耀. 气动伺服控制系统及阀的应用形式[J]. 燕山大学学报.2002,26(3): 206—208.
[5] 李小宁.气动技术发展的趋势[J].机械制造与自动化.2003,2(2):1—4.
[6] 韩建海,张河新.气动比例/伺服控制技术及应用[J].机床与液压.2001,1(1):3—6.
[7] 薛阳等.气动位置伺服系统的带因子的非对称模糊PID控制[J].北京理工大学学报.2003,23(1):71—74.
[8] 何钺.现代控制理论基础(机械类)[M]. 西安:西安交通大学出版社,1987.1—2.
[9] 易继锴,侯媛彬.智能控制技术[M].北京:北京工业大学出版社,1999. 1—8,238—247.
[10] Ningshu,Wanglunyou.Computer“PCM”and Learning Control for PositionofPneumatic[J].
Fluid Power,edited by T.Maeda.E&FN –SPON,1993:583—588.
[11] 高翔,李光华,何国辉.气动伺服控制系统的自适应模糊控制器的研究[J].海军工程大学学报,2002,14(3):14—20.
[12] 贺国保,彭光正,伍清河.模糊PID控制在气动摆动缸位置伺服控制中的应用[J].液压与气动.2004,1(1):24—26.
http://www.bysj1.com/cat.asp?id=27
http://www.bysj1.com/cat.asp?id=28
http://www.bysj1.com/cat.asp?id=22



