





















内圆抓夹测绘,重建与仿真设计
摘要
本课题设计的多轮毂夹取夹爪的设计,根据轮毂零件的结构及尺寸特点,设计一套用于专用的夹取、转运的自动机械夹取夹爪,主要包括夹爪的总体方案设计、夹爪的机械结构设计以及驱动系统设计等,实现了夹取夹爪手部的四自由度运动:手臂的升降、伸缩和手腕、手臂的回转。设计中分析了夹取夹爪的功能要求和现实意义,通过气压缸来实现手臂的升降和伸缩,采用回转气压缸来实现手腕和手臂的回转。设计的内圆夹取夹爪结构简单、便于操作。
关键词: 轮毂、夹爪;气缸;手腕;
1.绪论
1.1 内圆夹爪的概述
内圆夹爪由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。夹爪应用情况,是一个国家工业自动化水平的重要标志。生产中应用夹爪可以提高生产的自动化水平,可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、低温、低压、粉尘、易爆、有毒气体和放射性等恶劣的环境中,它代替人进行正常的工作,意义更为重大。因此,在机械加工、冲压、铸、锻、焊接、热处理、电镀、喷漆、装配以及轻工业、交通运输业等方面得到越来越广泛的引用。夹爪的结构形式开始比较简单,专用性较强,仅为某台机床的上下料装置,是附属于该机床的专用夹爪。随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用夹爪”,简称通用夹爪。由于通用夹爪能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
气压传动夹爪是以压缩空气的压力来驱动执行机构运动的夹爪。其主要特点是:介质李源极为方便,输出力小,气动动作迅速,结构简单,成本低。但是,由于空气具有可压缩的特性,工作速度的稳定性较差,冲击大,而且气源压力较低,抓重一般在30公斤以下,在同样抓重条件下它比液压夹爪的由于结构庞大,适合在高速、轻量、 温度高、粉尘多的环境中工作。
气压传动的优点有:
(1)介质提取和处理方便。气压传动工作压力较低,工作介质提取容易,而后排入大气,处理方便,一般不需设置回收管道和容器:介质清洁,管道不易堵存在介质变质及补充的问题.
(2)阻力损失和泄漏较小,在压缩空气的输送过程中,阻力损失较小(一般不卜浇塞仅为油路的千分之一),空气便于集中供应和远距离输送。外泄漏不会像液压传动那样,造成压力明显降低和严重污染。
(3)运动快,反应迅速。空气系统通常只需0.02s-0.33s就可以产生所需的速度和压力。气压传动系统也可以保护过载,便于自动控制。
(4)能源可储存。压缩空气可存贮在储气罐中,因此,发生突然断电等情况时,机器及其工艺流程不致突然中断。
(5)工作环境适应性好。在易燃、易爆、多尘埃、强磁、强辐射、振动等恶劣环境中,气压传动与控制系统比机械、电器及液压系统优越,而且不会因温度变化影响传动及控制性能。
(6)成本低廉。由于气动系统工作压力较低,因此降低了气动元、辅件的材质和加工精度要求,制造容易,成本较低。传统观点认为:由于气体具有可压缩性,因此,在气动伺服系统中要实现高精度定位比较困难(尤其在高速情况下,似乎更难想象)。此外气源工作压力较低,抓举力较小。虽然气动技术作为夹爪中的驱动功能已有部分被工业界所接受,而且对于不太复杂的夹爪,用气动元件组成的控制系统己被接受,但由于气动夹爪这一体系己经取得的一系列重要进展过去介绍得不够,因此在工业自动化领域里,对气动夹爪、气动夹爪的实用性和前景存在不少疑虑。
目 录
1 绪论 5
1.1 内圆夹爪的概述 5
1.2 气动夹爪的设计要求 6
1.3 夹爪的工作原理和组成 7
2 内圆夹爪的整体设计方案 8
2.1 夹爪整体结构方案 8
2.2夹爪的自由度 8
2.3 夹爪的主要零件的设计方案 9
2.4夹爪的主要技术参数 10
3夹爪关键部件的设计与计算 12
3.1手部结构的设计 12
3.1.1手指的形状和分类 12
3.1.2设计时考虑的几个问题 12
3.2手腕结构设计 13
3.2.1 手腕的自由度 13
3.2.2回转气缸的驱动力矩计算 13
3.2.3 手腕旋转气缸的大小和校核 13
3.3手臂结构的设计与校核 15
3.3.1 手臂伸缩气缸的尺寸设计与校对 15
3.3.2 手臂升降气缸的尺寸设计与校正 17
3.3.3机械臂旋转气缸的尺寸设计和校正 17
3.4气动系统的设计 19
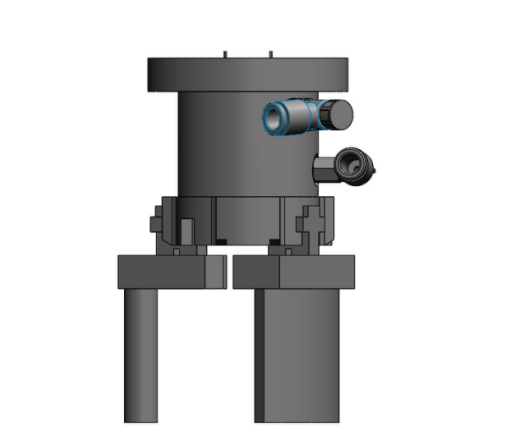
4内圆夹爪的三维建模和有限元分析 21
4.1三维建模软件分析 21
4.2内圆夹爪的零部件建模 21
4.3内圆夹爪装配体 22
4.4有限元分析 23
结 论 24
致 谢 25
参考文献 26
参考文献
1.张建民.内圆夹爪.北京:北京理工大学出版社,1988
2.蔡自兴.夹爪学的发展趋势和发展战略.夹爪技术,2001, 4
3.金茂青,曲忠萍.国外内圆夹爪发展势态分析.夹爪技术与应用 ,2001
4.王雄耀.近代气动夹爪的发展及应用.液压气动与密封,1999, 5
5.严学高,孟正大.夹爪原理.南京:东南大学出版社,1992
6.机械设计师手册.北京:机械工业出版社,1986
7.黄锡恺,郑文伟.机械原理.北京:人民教育出版社,1981
8.成大先.机械设计图册.北京:化学工业出版社
9.郑洪生.气压传动及控制.北京:机械工业出版社,1987
10.吴振顺.气压传动与控制.哈尔滨:哈尔滨工业大学出版社,1995
11.徐永生.气压传动.北京:机械工业出版社,1990, 5



