










基于UG智能垃圾分拣系统优化设计(设计说明书+CAD+三维建模全套)
摘要:近些年来,环境保护资源再生利用的呼声越来越大,自动化技术不断提高,对于垃圾分拣自动化的诉求也不断增加。然而现在大多数的垃圾分类回收都是依靠人工操作,随着工业自动化水平越来越高和工业机器人的长足发展,这种传统的人工流水线式的分拣方式已经不能满足各个方面的需求。近几年,智能制造,自动化技术一直是国家产业转型的重点。其特点是方便,高效率,经过调整可以应用到很多行业中,具有巨大的潜在应用价值。
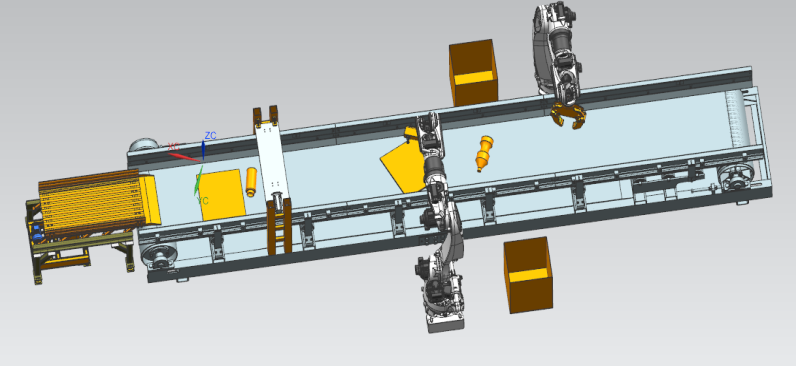
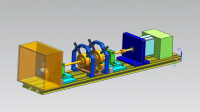
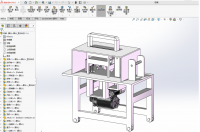
本次毕业设计主要由分筛机、工业相机、传送带、机械手臂及其末端执行器构成一个智能垃圾分拣系统。当垃圾通过分筛机分筛过后通过传送带运送到工业相机工作区域,经过图像处理环节将信号传送给机械手臂进行分拣操作。本设计主要针对目标物体为纸板,玻璃瓶塑料瓶,经过计算得出吸盘吸附力和卡爪运动仿真、干涉分析,然后根据最终结果判断出垃圾分拣方案的可行性。
本次毕业设计重在硬件方面不断完善智能垃圾分拣系统的设计,使得智能垃圾分拣系统的自动化程度更高,从而摆脱通过人工方式分拣,极大提高垃圾分拣的效率,该设计运用到垃圾回收中具有巨大的意义和价值。
关键词:智能垃圾分拣系统 分筛机 机械手臂 分拣
Optimization design of intelligent waste sorting system
Abstract In recent years, the voice of environmental protection and resource recycling is growing, the automation technology is improving, and the demand for waste sorting automation is also increasing. However, most waste sorting and recycling now rely on manual operation. With the increasing level of industrial automation and the rapid development of industrial robots, this traditional manual pipeline sorting method can not meet the needs of all aspects. In recent years, intelligent manufacturing and automation technology have always been the focus of national industrial transformation. It is characterized by convenience and high efficiency. After adjustment, it can be applied to many industries and has great potential application value.
This graduation project mainly consists of a screening machine, industrial camera, conveyor belt, manipulator and its end effector to form an intelligent waste sorting system. When the garbage is screened by the screening machine, it is transported to the working area of the industrial camera through the conveyor belt, and the signal is transmitted to the mechanical arm for sorting operation through the image processing link. This design mainly aims at the target objects such as cardboard, glass bottle and plastic bottle. The maximum load that the suction cup and claw can bear is calculated, and then the accuracy of waste sorting is calculated according to the final result.
This graduation project focuses on the hardware, constantly improving the design of intelligent waste sorting system, making the automation of intelligent waste sorting system higher, so as to get rid of manual sorting and greatly improve the efficiency of waste sorting. The application of this design to waste recycling has great significance and value.
Key words: Intelligent waste sorting systems Sieving machines Robotic arms Sorting
目录
第一章 引言 1
1.1 研究背景和意义 1
1.2国内外研究现状 1
1.2.1国内研究现状 1
1.2.2 国外研究现状 2
1.3研究内容 3
1.4论文结构安排 3
第二章 垃圾智能分拣系统方案设计 4
2.1 方案一 4
2.2 方案二 4
2.3 方案三 5
2.4方案对比及确定 5
2.5 本章小结 6
第三章 智能垃圾分拣系统设计 7
3.1图像采集系统设计 7
3.2 传送机构设计 8
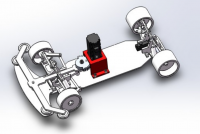
3.3 抓取机构设计 8
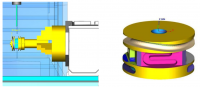
3.3.1真空吸盘介绍 8
3.3.2 真空吸盘设计 9
3.3.3 夹爪设计 9
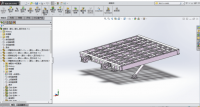
3.4筛分机构设计 10
3.5 本章小结 11
第四章 硬件选型及重点部件校核计算 12
4.1 滑轨电机选型 12
4.2 相机选型 12
4.3 传送带选型 13
4.4 工业机器人选型 13
4.5 气动装置选型 15
4.6 真空吸盘吸附力计算 16
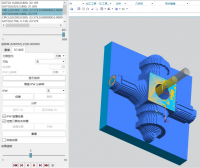
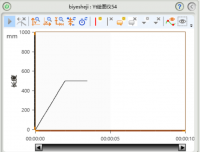
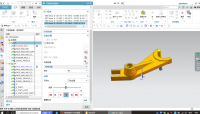
4.7 夹爪动态干涉分析 16
4.7.1 夹爪运动仿真介绍 16
4.7.2 仿真情况分析 17
4.7.3 夹爪调整及仿真验证 18
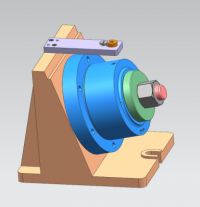
4.8筛分机构选型校核 19
4.8.1筛面倾角 19
4.8.2振动方向角 19
4.8.3振幅 19
4.8.4振动次数n 20
4.8.5 电机选型 20
4.9 本章小结 20
第五章 总结与展望 21
5.1 预期目标 21
5.1工作总结 21
5.2 未来展望 22
致谢 23
参考文献 24
第一章 引言
1.1 研究背景和意义
随着我国经济社会发展和城镇化的快速,环境污染也在进一步加剧。同时近些年为了应对全球气候变化,国家基于自身实际情况提出了“2030年碳达峰”和“2060年碳中和”的目标。吸收转化空气中的二氧化碳主要依靠植树造林,根据国家邮政局最新数据显示,我国快递年总量已突破1000亿件。生产各类纸制品所消耗的木料量是巨大的。能否从垃圾中分拣出可回收物并循环利用是环境保护的重要环节,我国垃圾分拣仍主要采用投入大量人工分拣的方式进行垃圾分类,这种传统方式存在自动化程度低,对人力劳动力需求大、工作环境恶劣和分拣效率低等问题,人工分拣已不能满足日益增加的垃圾处理需求。随着我国逐渐在人工智能领域完成“弯道超车”和我国工业自动化水平的不断提高,掌握大量自动化工厂的经验与技术。设计一套利用机器视觉对垃圾进行分类检测并利用工业机器人实现自动化分拣的智能垃圾分拣系统是具有可行性的,同时该系统的研究还具有很强的理论意义和重要的应用价值。
1.2 国内外研究现状
1.2.1 国内研究现状
我国垃圾分拣设备的研发起步较晚,到目前为此,国内有少数设备生产商能够设计生产出智能垃圾分拣设备。目前城市生活垃圾中的资源回收大多还是通过人工收集完成,依靠人工分拣回收的量也仅占垃圾有用资源的很小部分。多年来国内大部分城市生活垃圾都是简单填埋。近年来,开始对生活垃圾进行堆肥、火力发电、综合处置等。随着这些垃圾处理方式的出现,以及垃圾中有用资源的增多,分拣设备的开发诉求才逐渐得到回应。就目前来说,已有一部分厂家进行设备开发,并在全国部分地方投入试点运行。
我国工业自动化水平的不断提升,自动化生产模式已在多行业得到了应用并且反应良好,但在环保行业中工业自动化起步晚、投入少、垃圾分拣难度大等因素制约,适用于我国国情的自动化分拣设备匮乏,因此针对环保行业的垃圾分拣需求,以自动化工业设备替代人工分拣的方案势在必行,研发生活垃圾智能分拣系统有重要意义。由于新冠肺炎大流行使智能垃圾分拣系统的研发投入的兴趣增加了十倍。为了保护工人免受病毒感染,国内外都加大重视智能垃圾分拣的研发,智能垃圾分拣系统也在不断完善和趋于成熟。
1.2.2 国外研究现状
相比之下国外环保产业发展较早,在机器人分拣的相关技术上研发投入更多。芬兰的ZenRobotics公司最早于2012年公布其利用机器人搭载众多传感器进行建筑材料和工业材料的智能垃圾分拣。在经过近5年时间研发改进,ZenRobotics成功研发⼀种基于视觉判断的垃圾分类机器⼈。通过激光扫描系统,能够提前扫描传送带上的物品并且将它们进⾏分类,然后通过机械臂将垃圾分类。
日本FANUC公司设计了一款分拣机器⼈Waste Robot,Waste Robot使⽤LRMate 200iD型号机器⼈作为主体并搭配FANUC自主研发的视觉分析技术,该视觉分析系统能够对物品进⾏跟踪和分类。这种视觉分析技术搭配分拣机器人的方式是目前市场上主流的分拣方式。美国麻省理工学院开发了一款Rocycle的垃圾分选机器人,与FANUC的分拣机器人不同的是,Rocycle垃圾分选机器人采用触觉方式分析目标物体,工作时,通过安装在末端执行器上的压力传感器感应抓住物体所需要的⼒,并以此确定材料刚度。最后与压⼒传感器获得的数据相互对⽐匹配,分辨出物体材质后,Rocycle会将其投⼊正确的垃圾箱。
Max-AI是美国光学设备⽣产商National Recycling Technologies研发的智能垃圾分类机器⼈,Max-AI由视觉检测系统、深度学习网络及分拣系统组成。通过深度学习技术,识别检测物体的准确率更高。在经过辨别后通过机器手臂对目标分拣。
1.3 研究内容
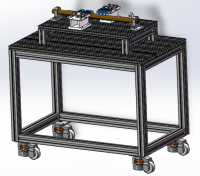
本课题提出智能垃圾分拣系统优化旨在进一步完善垃圾设备分拣提高垃圾分拣效率,通过在垃圾传送带前方架设分筛机对垃圾进行简单预处理,在该处理后垃圾之间物理间距拉大,便于相机获取更清晰的图像信息和机器手臂能更快分筛出所要目标。本课题将通过设计分筛机、末端执行机构等部分,在硬件部分完善智能垃圾分拣系统。
1.4 论文结构安排
本课题设计一套智能垃圾分拣设备,利用工业相机,机器手臂末端执行器对垃圾进行一系列的识别、分拣处理。进而可以得到实验结果进行分析判断,最终判断该设计是否可行。
该论文一共可分为五个部分,具体内容如下:
第一章 为引言部分。主要叙述课题研究背景和意义,接着分析国内外研究现状。最后主要概括每个章节内容。
第二章 提出方案。根据本课题提出多种方案,详述方案的整体结构设计,对比不同方案的优缺点和可行性最后给出最优方案。
第三章 将智能垃圾分拣系统分解为图像采集系统,传送机构、抓取机构、筛分机构四个板块,对每个板块进行论述。
第四章 根据最终确定方案,构建模型。然后查找相关书籍资料对各个机构部件进行选型,对吸盘和夹爪的重要位置部件进行计算仿真,然后分析比较得到的计算结果,说明该方案设计的可行性。
第五章 预期效果及总结与展望。描述预期效果,对本课题全部内容进行总结,并对设计提出更具建设性展望。
参考文献:
[1]李健凯. 基于深度学习的视觉机器人垃圾分拣系统设计[D].天津工业大学,2021.DOI:10.27357/d.cnki.gtgyu.2021.000500.
[2]周滢慜. 基于机器视觉的生活垃圾智能分拣系统的设计与实现[D].哈尔滨工业大学,2018.
[3]吕纯.城市生活垃圾机器视觉智能分拣系统、软硬件设计要点研究[J].智能城市,2020,6(20):8-9.DOI:10.19301/j.cnki.zncs.2020.20.003.
[4]刘策,柳杨.新经济背景下生活垃圾智能分拣系统设计与实践的价值分析[J].营销界,2019(47):139+144.
[5]张卫民,国海,璐露,汪幸民,张春雨.垃圾处理筛选机滚筒模态分析及优化设计[J].佳木斯大学学报(自然科学版),2021,39(03):83-86.
[6]黄志辉. 某型高频振动细筛的设计与优化[D].厦门理工学院,2016.
[7]施徐伟,丁书艺,储妤,郑思婕,韦朴.基于机器视觉的垃圾分拣系统[J].电子测试,2021(21):35-36+42.DOI:10.16520/j.cnki.1000-8519.2021.21.012.
[8]刘智臣.一种基于5G云化机器视觉的垃圾分拣系统研究[J].物联网技术,2021,11(06):90-91+94.DOI:10.16667/j.issn.2095-1302.2021.06.028.
[9]郜辉,吕志刚,王宾,毛琳,王辛.智能垃圾分拣系统的设计[J].自动化与仪表,2020,35(12):31-34+39.DOI:10.19557/j.cnki.1001-9944.2020.12.007.
[10]Zhang Ting,Li Meng,Li Lianglin,Luo Wulei. Design of Garbage Classification System based on RFID[J]. Journal of Physics: Conference Series,2021,1744(2).
[11]Wang Shuai,Yang Zi’yu. Design of high-rise garbage sorting and conveying system based on gravity power generation system[J]. IOP Conference Series: Earth and Environmental Science,2021,651(2).
[12]Binyan Liang,Liang Binyan,Wang Yanbo,Wang Yao,Chen Zhihong,Lin Junqin. Garbage Sorting System Based on Composite Layer CNN and Multi-Robots[J]. Journal of physics. Conference series,2020,1634(1).
[13]Liviu Marian Ungureanu,Ileana Dugăeşescu,Elisabeta Niculae. Modelling and simulation of a waste sorting mechatronic system for multi-floor residential buildings[J]. E3S Web of Conferences,2019,112.
[14]王志伟,孟玲琴,刘丹,薄林海.振动筛选机的优化设计[J].农业机械学报,2006(05):67-71.
[15]曾乙伦,甯尤军.直线振动筛筛分过程与效果的动力学模拟分析[J].机械设计与研究,2020,36(02):163-168.DOI:10.13952/j.cnki.jofmdr.2020.0078.



