










基于Robot Studio ABB工业机器人的远程监控系统设计
摘要 随着我国人口老龄化的原因,劳动力成本提高,大部分产业将不得不向自动化生产方面发展。伴随着国家行动纲领《中国制造2025》的提出,工业机器人产业得到了大力的发展。近几年来工业机器人在生产中的应用越来越多,随之产生了大量工业机器人远程监控的需求。文中基于Visual Studio环境应用C#开发设计了一套针对ABB工业机器人的远程监控系统。主要完成了以下工作:
(1)综述了ABB工业机器人远程监控系统的特点与开发环境,明确系统要实现的功能,确定系统总体架构的设计。
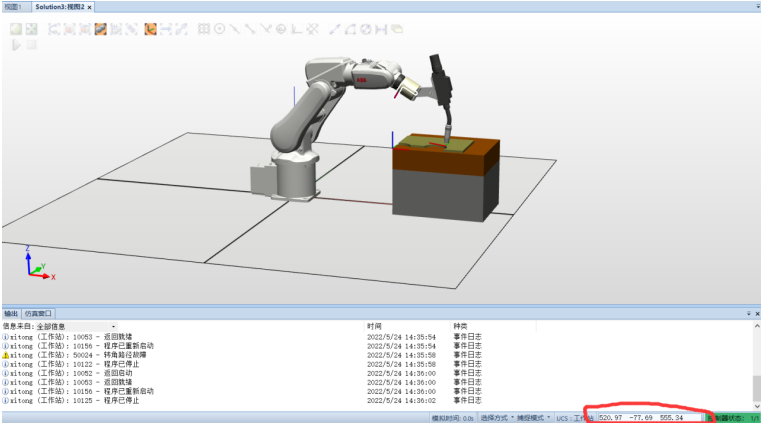
(2)利用Robot Studio 6.08创建机器人的仿真工作站,对机器人工件进行选取、环境进行创建。通过示教编程,实现对机器人焊接的模拟仿真。
(3)基于PC SDK实现了PC对ABB机器人的远程监控系统设计与编程。通过VS C#.NET编写远程监控机器人的程序,实现PC对机器人的远程系统的开发,实时获取工业机器人的相关数据,包括:机器人的实时TCP坐标、I/O信号状态、关节角度等。
(4)实施了系统监控功能的验证。验证了通过网线的连接对真实机器人进行监控,证实系统能与真实机器人正常连接,实现预期监控的功能,同时系统运行稳定、可靠。
关键词:ABB工业机器人 远程监控 PC SDK VS C#.NET编程
Design of Remote Monitoring System Based on ABB Industrial Robot
Abstract With the aging of population and the increase of labor cost, most industries will have to develop to automatic production. With the proposal of the national action program made in China 2025, the industrial robot industry has been vigorously developed. In recent years, industrial robots have been used more and more in production, and a large number of industrial robots need remote monitoring. In this paper, a set of remote monitoring system for ABB industrial robot is developed and designed based on visual studio environment and c# Mainly completed the following work:
(1) This paper summarizes the characteristics and development environment of ABB industrial robot remote monitoring system, defines the functions to be realized by the system, and determines the design of the overall architecture of the system.
(2) Robot studio 6.08 is used to create a robot simulation workstation to select robot workpiece and create environment. Through teaching programming, the simulation of robot welding is realized.
(3) Based on PC SDK, the design and programming of the remote monitoring system for ABB Robot by PC are realized. Via vs c Net, realize the development of the remote system of the robot by PC, and obtain the relevant data of the industrial robot in real time, including the real-time TCP coordinates, i/o signal status, joint angle, etc.
(4) The verification of system monitoring function is implemented. It is verified that the real robot can be monitored through the connection of network cable, and the system can be connected with the real robot normally to achieve the expected monitoring function. At the same time, the system runs stably and reliably.
Key words: ABB industrial robots Remote monitoring PC SDK VS C#. Net programming
目录
第一章 绪论 1
1.1 课题研究意义 1
1.2 国内外研究状况 1
1.2.1 远程监控系统国外研究状况 1
1.2.2 远程监控系统国内研究状况 3
1.3 课题主要研究内容 4
第二章 工业机器人远程监控系统总体架构设计 6
2.1 监控系统功能实现 6
2.1.1 系统开发模式的选择 6
2.1.2 系统远程监控的实现 6
2.2 系统总体架构设计方案 7
2.3 监控系统软硬件选择 7
2.3.1 监控系统硬件选择 7
2.3.2 监控系统软件选择 7
2.4 本章小结 8
第三章 基于RobotStudio软件构件工业机器人仿真工作站 9
3.1 仿真工作站的布局设置 9
3.2 工业机器人I/O信号的设定 11
3.2.1 通过“配置编辑器”设定I/O信号 11
3.2.2 通过“示教器”设定I/O信号 12
3.3 系统控制器选项的选择 14
3.4 工作站的程序解析 15
3.5 仿真工作站的调试 17
3.6 本章小结 17
第四章 工业机器人远程监控系统的设计与编程 18
4.1 远程监控系统界面设计 18
4.2 PC SDK的功能实现 18
4.3 监控系统的程序编程 18
4.3.1 控制器的扫描与添加 21
4.3.2 控制器信息的读取 22
4.3.3 电机的启动与停止、程序的运行与关闭 22
4.3.4 程序指针指向主程序功能 23
4.3.5 工业机器人I/O信号的读取 24
4.3.6 Timer计时器的运用 24
4.3.7 多线程的运用 25
4.3.8 控制器日志信息的显示 26
4.4 本章小结 27
第五章 远程监控系统的调试 28
5.1 监控画面与ABB机器人的连接调试 28
5.2 工业机器人的监控功能的调试 28
5.2.1 工业机器人电机的上电下电功能的调试 28
5.2.2 工业机器人开始运行停止运行功能的调试 29
5.2.3 工业机器人指针复位功能的调试 32
5.2.4 I/O信号获取验证 33
5.2.5 ABB工业机器人移动坐标信息验证 35
5.3 监控系统与真实机器人通讯连接与调试 36
5.3.1 监控系统与真实机器人的通讯连接 36
5.3.2 监控系统与真实机器人间的调试 38
5.4 本章小结 40
第六章 总结与展望 41
致谢 43
参考文献 44
附录 C#源代码 46
第一章 绪论
1.1 课题研究意义
随着我国战略方针“中国制造”的提出[1],大量机器人进入到我们的生活当中,以此来代替日益昂贵的劳动力。随着人们生活水平的不断提升,人们对共产车间环境的要求也越来越高了。如何远离肮脏的环境,远离机器的辐射,以及车间喧闹的环境成为了年轻人选择单位的一个新的标准。实现工业机器人的远程操作成为了新兴企业改造重要任务,只有这样企业才能更好的发展,不被时代所淘汰。而且运用于自动化生产上的机器人出现故障而没有及时的进行修复,那给企业带来的损失会是极大的。
随着云制造概念的提出[2],企业的智能化,云端化,已然成为当今智能化发展的一新的趋势,而这一趋势也越来越向人们的生活中发展,在现代生活中,人们已经越来越离不开电梯的乘坐,提高电梯运行状态监测准确性,设计了基于ZigBee及GPRS通信技术的电梯远程监控系统[3]。这个系统的设计为人们的生活出行带来极大的便利。
随着人们生活水平的提高,蔬菜水果的季节性已然不那么鲜明,这些都得益于温室大棚的发展,而对于大棚的远程监控也成为新的问题所在[4]。在温室中安装智能设备,远程监控,采集数据,实现作物的标准化管理[5],远程监控给我们的生活带来了极大的便利,所以我们对于远程监控的研究很有意义。
1.2 国内外研究状况
国外在这一方面的发展起步比较早,所以发展的比国内快,而且发展的领域也更加宽泛,国外在这一方面的发展已运用与生活中的各个方面。而国内只在几个方面有所发展,而且发展的不是特别迅速。但随着我国生产力的发展,在远程监控技术方面也有了重大的突破。
1.2.1 远程监控系统国外研究状况
国外在远程监控方面的研究十分的深入,且包含了生活中的方方面面。小到最基础的企业装置的维修,大到医院有关心力衰竭警报远程监控系统。由Smieszek M 提出的远程监控车辆运行效率的信息系统[6]描述了利用现代遥信技术对车辆技术状况和运动方式进行远程监控的信息系统。该系统共有17个形态特征,决定了系统主要功能要素的远程支持水平,以便在适当的基础设施条件下获取有关车辆技术状况和运动模式的信息。建立了车辆技术状态、运动方式和基础设施特性参数监测系统的信息模型。该模型在信息与软件综合体中实现,用于车辆运行效率的远程监控。给出了利用所开发的信息和软件复合体对给定航线上货车运行效率进行试验研究的结果。结果表明,在不同道路高度剖面特征的路线上,车辆技术车速和发动机平均冷却液温度对油耗、二氧化碳、氮氧化物和颗粒物排放等运行效率指标影响显著。
由格林·米切尔提出的自主农业机械远程监控实时无线视频传输过程中时延的测量主要介绍了随着自动驾驶汽车在农业中的突出地位不断提高,设备的远程监控很可能成为运营的一个关键方面[7]。视频从车辆到观众的中继过程中的传输延迟没有得到很好的探索,并且是应该评估的通信的重要组成部分。一台骑乘式割草机配备了使用GStreamer的Raspberry Pi和一个开源延迟测量库,以组装一个实时流媒体系统,以评估使用蜂窝和无线电传输的不同环境中的传输延迟。在大多数位置,测得的延迟低于 200–300 毫秒。在蜂窝连接质量足够的地区,与无线电传输相比,蜂窝延迟和方差降低,以获得更高质量的视频。在蜂窝网络覆盖较差的地区,蜂窝传输延迟增加,而无线电传输延迟保持不变。总体而言,延迟往往会随着视频质量的增加而增加,达到统计上显着的程度。建议在具有足够蜂窝信号强度的区域使用现有蜂窝网络,在短距离上传输实时视频,以便对自主农业机械进行田间监控。如果在特定现场位置没有足够的蜂窝信号强度,建议使用无线电传输传输视频。
由梅利特·阿德尔提出的利用物联网和深度卷积神经网络设计了一种新型智能温室远程监控系统中详细讲述了一种用于温室远程监测的新型原型[8]。该原型允许在温室内创建足够的人工环境(例如,水灌溉,通风,光强度和CO2浓度)。借助物联网技术,使用具有低成本Wi-Fi模块(NodeMCU V3)的适当传感器测量受控参数(空气温度,相对湿度,电容土壤湿度,光强度和CO2浓度)并将其上传到设计的网页。还开发了一个Android移动应用程序,使用A6 GSM模块来通知农民(例如,在发生任何异常时发送警告消息)有关植物的状态。使用低成本相机通过网页收集和发送植物的图像,以进行可能的疾病识别和分类。在此背景下,开发了一个深度学习卷积神经网络,并将其实现为Raspberry Pi 4。为了供应原型,建造了一个小型光伏系统。实验结果验证了该试验的可行性,并证明了该样机远程监测和控制温室以及识别植物状态的能力。设计的智能原型可以为农民提供实时远程测量和传感服务。
由穆尔齐斯·迪米特里斯提出的基于混合现实的工业设备智能预测维护与远程监控框架主要讲述了当前应用的维护策略(包括反应式和预防性维护)可被视为过时[9]。随着计算能力的提高,信息和通信技术以及数字技术的不断改进,促进了新的人工智能算法的发展,以将认知整合到计算系统中。这种趋势给工程师带来了巨大的挑战,因为这样的发展将使我们能够创建强大的系统,该系统可以监控机器的当前状态,并通过扩展来预测不可预见的情况。此外,与人类相比,智能计算机将能够检查所有可能的场景,并在很短的时间内提出可行的解决方案。为此,提出一种基于人工智能算法进行数据采集、融合和后处理的预测性维护和远程监控系统的建模、设计和开发。除此之外,拟议的框架还将集成一个混合现实应用程序,用于直观的数据可视化,最终将促进生产和维护工程师监控机器的状况,最重要的是获得对即将到来的故障的准确预测。
由道伦阿皮纳特提出的大坝安全远程监控系统详细描述了大坝安全远程监控系统DS-RMS基于土木工程专业知识的决策[10],该系统根据日常场景和地震、洪水等特殊事件,根据基于行动的建议进行决策。该系统自2016年以来一直全面运行,每天24小时自动评估3种主要大坝类型的35种失效模式。主要好处包括快速可靠地获取有关大坝的最新信息,以及在危急情况下成为大坝管理人员的缓解剂。在进一步的开发中,部分实时大坝信息被选中,并通过移动应用程序自动连续地向公众提供大坝安全评估结果。从以上国外的研究中可以看出国外在远程监控这一方面,发展十分迅速,应用道德领域十分广泛。相对于国内而言研究的更加深入透彻。
1.2.2 远程监控系统国内研究状况
国内因为发展的较晚,所以比起国外来讲还是有所欠缺,但国内这以方面的专家还是提出了许多有意义的研究方案。
在计算机方面,有伍鑫明提出的基于计算机网络技术的远程监控系统的应用研究[11],介绍了随着近几年来随着我国计算机技术的日渐成熟,我国的各个生产领域的合作也更加紧密,把物联网技术与我国的工业技术相结合,以此来推动我国计算机远程监控技术的发展。
不仅如此在其他领域,远程监控技术也是大放异彩。我国西部有大量的矿产资源,对于矿物的合理开发采集也是十分重要。由刘丽静提出的矿井提升机的远程监控系统设计[12],她介绍了有关对矿井信息的监控,在提升机出现问题时,如何快速检测到并马上解决。而由沈燕提出的石油开采过程的远程监控系统[13] ,她所研究的系统很好的反应了油田的开发方式,利用自己独特的见解,明确系统的监控流程。这种监控系统的开发,大大提高了石油开采的效率。对于重工业的发展带来重大突破。
我国在养殖业的远程监控发展也十分迅速。由鲁慧琦提出的水虻养殖环境远程监控系统的设计,该系统能够准确、实时的采集养殖环境数据并及时进行处理,当环境异常时,可及时进行干预直至恢复为正常状态[14]。而由彭喜英提出的禽畜养殖远程监控系统,它可以远程监控家禽的生活状态,可以对家禽的生活环境进行检测。实现畜禽养殖场的综合监控,对温湿度、光照度、废气浓度等参数进行实时在线监测与可靠传输[15]。我国的农业、养殖业发展较快,所以在这一领域我国的远程监控发展也同样迅速。
在机器人远程监控方面,由傅贵武提出的基于SDK通信接口的工业机器人远程监控系统的设计[16],实现了对机器人的控制器的监控。为机器人监控的快速发展提供新的思路,具有很大的工程应用价值。
1.3 课题主要研究内容
通过应用Visual Studio(C#)设计监控界面、开发监控程序,并对ABB工业机器人实施网络远程监控。确定系统设计方案,完成监控界面布局设计、机器人工作环境的建立、机器人代码的编写、监控程序的编写。本文的主要研究内容如下:
第1章:研究远程实时监控的国内外发展情况,了解远程监控的意义。对研究的内容进行归纳。
第2章:工业机器人监控功能关键两点为开发模式的选择以及系统的实时监控。本章介绍系统的总体架构设计,为后续Visual Studio(C#)的编写做出铺垫,并对选取到的硬件进行介绍。
第3章:首先建立ABB工业机器人的仿真工作站,对其布局进行设计,在对工业机器人I/O信号进行设定,对系统的控制器进行选择,对仿真工作站进行程序的解析以及仿真调试。
第4章:选择控制器作为主要研究对象,了解PC SDK各模块的功能与作用,根据机器人环境的搭建,针对性的开发适应其的系统,系统主要可以实现控制器信息读取、网络控制器扫描还可以对机器人运行状态的信息进行实时的读取,并且系统具有让机器人电机上电、下点及让机器人开始运行、停止运行的功能,也拥有让电机自行复位的功能,且做出指令后有及时的任务窗口显示每一次指令的状态,并结合Robot Studio软件对该监控系统进行了仿真实验验证,来验证监控系统所包含的所有功能是否能够实现。
第5章:对已经完成的系统进行仿真测试,确定其大致的功能,及功能能否顺利的实现进行测试。观察其是否可以对多个机器人进行实时监控。在实践中理解实时监控的优势,及在实践中找到系统之中还存在的漏洞,方便之后更好的学习与修改。
第6章:总结与展望。对整个监控系统进行评测。概述系统的优缺点,针对其缺点给出合理意见。且根据不同实时场地运用的不同,进行合理的改变,创新,优化系统的方案。
参考文献:
[1]张莹婷.《中国制造2025》解读之:中国制造2025,我国制造强国建设的宏伟蓝图[J].工业炉,2021,43(01):33.
[2]刘永奎,张霖,刘迎福,冯坚勇,于博,牛文博.云制造环境下工业机器人远程监控系统设计与实现[J].系统仿真学报:1-13[2022-05-19]
[3]马媛媛.基于ZigBee及GPRS通信技术的电梯远程监控系统设计[J].江西通信科技,2021(04):20-21
[4]韦湛兰,曾丽颖,廖应学.基于物联网技术的温室环境远程监控标准化实践[J].中国标准化,2021(20):66-68.
[5]阮继瀚,张薪.基于STM32的农业温室远程监控系统设计[J].新型工业化,2021,11(09):131-134
[6]Śmieszek M. et al. Information system for remote monitoring the vehicle operational efficiency[J]. IOP Conference Series: Materials Science and Engineering, 2021, 1199(1)
[7]Green Mitchell and Mann Danny D. and Hossain Ekram. Measurement of latency during real-time wireless video transmission for remote supervision of autonomous agricultural machines[J]. Computers and Electronics in Agriculture, 2021, 190
[8]Mellit Adel et al. Design of a Novel Remote Monitoring System for Smart Greenhouses Using the Internet of Things and Deep Convolutional Neural Networks[J]. Energies, 2021, 14(16) : 5045-5045.
[9]Mourtzis Dimitris and Angelopoulos John and Panopoulos Nikos. Intelligent Predictive Maintenance and Remote Monitoring Framework for Industrial Equipment Based on Mixed Reality [J]. Frontiers in Mechanical Engineering, 2020, 6
[10] Dowrueng Apinat et al. Decision Support System in Thailand's Dam Safety With a Mobile Application for Public Relations: DS-RMS (Dam Safety Remote Monitoring System)[J]. International Journal of Decision Support System Technology (IJDSST), 2021, 14(1) : 1-35.
[11]伍鑫明.基于计算机网络技术的远程监控系统应用研究[J].网络安全技术与应用,2022(03):25-26.
[12]刘丽静,夏晶晶.基于云平台的矿井提升机远程监控系统设计[J].科学技术创新,2021(18):70-71.
[13]沈燕,孟丽,闫诚.基于ZigBee技术的石油开采过程的远程监控系统[J].石化技术,2021,28(06):95-96.
[14]鲁慧琦.水虻养殖环境远程监控系统的设计与实现[D].华中师范大学,2021
[15]彭喜英,李博文,彭国钦,梁芬.畜禽养殖微云远程监控系统设计[J].中原工学院学报,2021,32(02):25-29.
[16]傅贵武,田英,王兴波.基于SDK通信接口的工业机器人远程监控系统设计[J].机床与液压,2020,48(17):29-33.
[17]姚明菊.C/S架构性能测试研究和应用[J].科学技术创新,2021(01):79-80.
[18]谢坤鹏. 工业机器人3D虚拟动态远程监控系统的研究[D].天津职业技术师范大学,2019.
[19]杨怡婷,梅灿华,于世楠.基于RobotStudio仿真软件的ABB工业机器人运动轨迹程序的设计[J].数字技术与应用,2021,39(07):123-125
[20]常海军.关于物联网消防远程监控系统建设工作的思考[J].今日消防,2021,6(03):31-32.



