





















高楼自动清洗机设计(说明书+cad图纸)
摘要
随着人类文明的发展,高楼自动清洗机器人应运而生。
高层建筑物的壁面目前大部分还是由人工进行清洗,不仅效率低、工作环境恶劣,而
且还容易出事故.高楼自动清洗机器人是一种极限条件下作业的机器人,它能够在垂直的
壁面上爬行并能够有效地完成清洗作业。它对于解决目前日益严重的高楼大厦壁面清洗问
题有着很大的价值,使用它能够大大提高清洗工作效率,降低费用开支,彻底改善清洗人
员的工作条件,实现高楼外墙清洗的自动化,具有很好的市场潜力和实用价值。
高楼自动清洗机是机器人发展的一部分。它采用微机控制系统,对机器人行走、吸附、
清洗、安全等方面进行控制,很多地方采用了传感器技术、跟踪技术,操作简单,方便。
本文首先介绍了国内外爬壁机器人研究现状及发展趋势,阐明了本课题研究的目的、
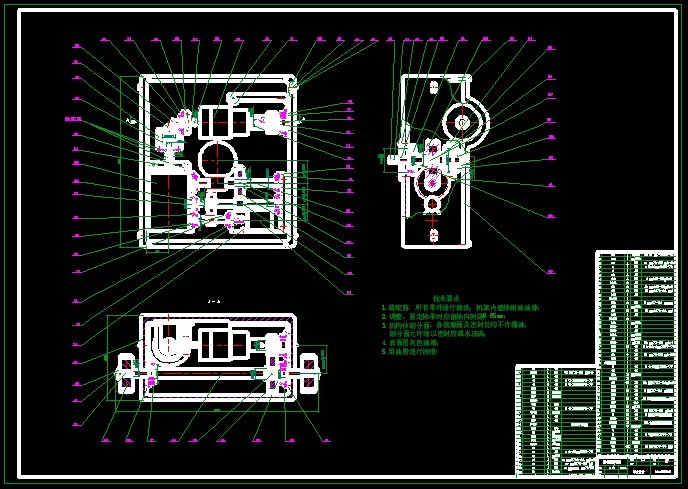
意义。然后进一步介绍本高楼自动清洗机器人总体结构和各部件方案的选择,并在此基础
上进行了高楼自动清洗机器人的机械结构的设计计算,主要包括框架设计、电机选取、爬
行机构设计、转向机构设计,清洗机构中连杆机构设计以及轴和轴承的设计校核等。
关键词 清洗机 ;爬壁机器人 ;自动机构 ;设计
1 绪 论
随着社会的进步,物质文明的发展,人口膨胀,一座座高耸入云的大厦应运而生。可
是随之而来的问题是如何保持大厦的清洁,使整个城市焕然一新,为我们提供一个良好的
生活环境。为了解决这个难题,许多国家开始着手研究,提出了多种方案,当然,人们最
先想到的是靠人工擦洗,但人工擦洗工作效率低,劳动强度大,而且危险系数很高,于是
擦窗玻璃机产生。但它的适应面非常窄,需要凭借人的操作以及开启窗户。人们于是又转
向了研究机器人,来进行高楼清洗。
“机器人”体现了人类长期以来的一种愿望,即用一种具有拟人功能的机器,来代替
人去进行各种活动。
早在三千多年前西周时代,有个叫偃师的工匠,就巧妙的制造了一个能歌舞的称为“倡
者”的“机器人”。虽然它实质上是一个木偶,但这也许是文献记载里最早的“机器人”
的雏形。在二千多年的东汉时代,张衡发明了指南车,在车辆运动过程中木人的手总会指
向南方,这是世界上最早的移动式“机器人”的雏形。传说中三国时,诸葛亮创造了木牛
水马,是另一种移动式机器人。说明了中国追求机器人实现的努力由来已久。
人类加入近代之后,随着产业革命,各种机械装置的发明和应用,日本、西欧等国家
出现了精巧的“机器人”玩具。这些装置大多由时钟机构驱动,用凸轮和杠杆传递动力。
1920 年捷克剧作家K.凯比可在他的__________科幻情节剧《罗沙姆万能机器人公司》中,第一次提
出了ROBOT这个词。
进入50,60年代后,随着机构理论和数控伺服技术的发展,机器人进入实用化阶段,
到70 年代后,随着计算机技术,控制技术,传感技术和人工智能技术的发展,使得这两
种机器人在技术水平和应用领域方面得到迅猛地发展。
高楼自动清洗机是机器人在高楼清洗上地运用。爬壁机器人是机器人领域的一个新兴
研究方向,正式的研究始于20 世纪80 年代中期,经过近20 年的发展,爬壁机器人的研
究已取得了很大的进步,并逐步走向实际应用。尤其是高层建筑壁面清洗机器人,由于清
洗行业的迫切需求,世界各地很多国家都在竞相研制,然而现有的壁面清洗机器人往往因
为结构复杂、适应性差、成本高等多种原因而最终很难大规模地进入实际使用。
在国内爬壁机器人地研究虽然比较晚,但发展比较迅速,上海大学从1987年开始在上
海市科委和国家863地支持下,率先从事爬壁机器人的研究。此后哈尔滨工业大学、北京
航空航天大学、上海交通大学等单位也相继开展了这方面的研究,目前已取得阶段性的成
果。其中北京航空航天大学机器人研究所研制的擦窗机器人,在爬壁机器人载体方面有重
大的创新。
由于所学知识十分有限,经验不足,设计过程难免会出现不正确或不够完善的地方,
还望各位老师多多指正,不胜感激!
徐州工程学院毕业设计(论文)
2
1.1 课题研究的背景
在现代都市中,高层建筑越来越多,各种各样的摩天大楼成为现代都市中一道亮丽的
风景。这些高楼的壁面多采用瓷砖和玻璃幕墙作为装饰,有的还要敷设铝塑板等,这些装
饰材料美观、漂亮,但是时间一长,就需要对壁面进行清洗,以美化市容市貌.许多开放
性城市都规定,每年应对高楼清洗若干次。可见清洗高层建筑外墙将来可能会成为各清洁
公司的主要业务.长期以来,对高层建筑的清洗工作主要是由人工完成的。传统常用的幕
墙清洗方式无非是“人工+吊板”或“人工+吊篮”。前者利用一条简陋的绳索悬挂木板
载人擦拭(即我们通常所说的“蜘蛛人”),不仅效率低,而且易出事故。后者利用吊装
机悬挂吊篮载人擦拭,相对较为安全,但前期设备投资较大,清洗成本高。因此,人们迫
切希望能设计制造出一种可以代替人工完成高层建筑清洗任务的装置,于是,高层建筑清
洗机器人应运而生。壁面清洗机器人是以清洗高层建筑为目的的壁面移动机器人.它的出
现将极大降低高层建筑的清洗成本,改善工人的劳动环境,提高生产效率,也必将极大地
推动清洗业的发展,带来相当的社会效益、经济效益.因此,国内外多家研究机构都在积
极开展此项研究工作。但由于现代建筑艺术的个性化讲究,所以清洗作业的自动化仍面临
着来自对象化的巨大挑战。
1.2 爬壁机器人的分类
壁面清洗机器人是以爬壁机器人为基础开发出来的,是爬壁机器人的用途之一。机器
人能够在壁面上自由移动,必须具备两大机能,即吸附机能、移动机能。一般来讲,爬壁
机器人主要按吸附机能和移动机能来进行分类。
按照吸附机能分类,爬壁机器人可分为:真空吸附、磁吸附和推力吸附三类。
按照移动方式分类,爬壁机器人可分为车轮式、履带式、多层框架式和腿足式。
根据不同的贴附方式和移动方式可以组成多种不同功能和用途的爬壁机器人。如单吸
盘真空负压式爬壁机器人,负压吸附履带式爬壁机器人,电磁吸附多足式爬壁机器人,永
磁吸附车轮式壁面移动机器人,靠螺旋桨产生推力的推力附着轮式壁面移动机器人等。每
一种形式的爬壁机器人都各有其特点,分别适用于不同的场合,选用时需根据具体的使用
条件进行不同的选择。鉴于建筑物壁面的非导磁性,所___________以壁面清洗机器人多采用真空吸附
方式,由风扇、空气压缩机等真空发生设备在机器人和墙壁的接触面间形成负压,依靠压
差使机器人吸附在墙壁上。
参考文献
[1] 赵言正.全方位壁面移动机器人系统的研究 [D].哈尔滨:哈尔滨工业大学,1992.
[2] 刘琦.玻璃幕墙清洗机器人控制系统研究 [D].上海:上海大学,2004.
[3] 西村文维.真空吸着壁面自走车(VACS) [J] .油空压技术,1988,No.11 Vol.6:111-121
[4] A .Nagakubo,S.Hirose.WAIing and running of the quadruped wall-climbing robot. Proc. of IEEE int.
conference on robotics and automation. 1994:1005-1012
[5] Patrice Kroczynshi, Brian Wade. The skywasher: A building washing robot [J] . Proc. of 17 th
international sym. On industrial robots. 1987:11-19
[6] B.L. luk, A.A. Collie et al. Robug II: An intelligent wall climbing robot. Proceeding of the 1991 IEEE int.
conf [J]. On robotics and automation.1991:2342-2347
[7]. Jack.Hollingum. Hazardous climb to industrial recognition. Industrial robot [J] Vol.24,No.2,1997:135-139
[8] 柳春辉,赵言正等. 爬壁机器人技术及应用机器人技术与应用 [J] .No.2;1996:4-7
[9] 谈士力,沈林勇等,垂直壁面行走机器人系统研制.Vol.18,No.4;1996:232-237
[10] 谈士力.爬壁机器人系统设计及仿真 [D].上海:上海科技大学,1992:12-1
[11] 刘淑霞,赵言正,王炎.高楼壁面清洗机器人及相关技术的研究 [J]览.No.5;1999:22-25
[12] 邵杰,赵言正等.用于玻璃幕墙清洗作业的爬壁机器人系统 [J]. Vol.22,No.2:2000:6-9
[13] 任治国.基于螺旋桨吸板贴附的高层建筑壁面清洗机器人系统的研究 [D].北京:北京
航空航天大学,2003
[14] “蓝天洁士”幕墙清洗机器人系统简介 [J] .《机器人技术与应用》No.3, 2002
[15] 马培荪,陈品佳等.油罐容积检测用爬壁机器人的研制 [J].上海交通大学学报.
Vol.30,No.11;1996:159-164
[16] 陈品佳,马培荪等油罐容积检测用爬壁机器人控制系人.Vol.19,No.2;1997:120-126
[17] 徐海霞.高楼自动清洗机 [D].西安:西北工业大学,1996
[18] 王园宇.新型壁面清洗机器人的动力学分析及其最优控制 [D].太原:太原理工大2003
[19] 华南理工大学,谢存禧,张铁主编.机器人技术及其应用 [M].机械工业出版社,2005
[20] 刘鸿文主编.材料力学 [M].北京:高等教育出版社,2004
[21] 西北工业大学机械原理及机械零件教研室编,孙桓,陈作模主编.机械原理(第六版)
[M].北京:高等教育出版社,2001
[22] 西北工业大学机械原理及机械零件教研室编著,濮良贵,纪名刚主编.机械设计(第
七版) [M].北京:高等教育出版社,2001
[23] 华中理工大学 王昆,重庆大学 何小柏,同济大学 汪信远主编.机械设计(机械设计
基础)课程设计 [M].北京:高等教育出版社,1995
[24] 东北大学《机械零件设计手册》编写组编,蔡春源主编.机械零件设计手册(第三版)
下 [M].冶金工业出版社,1994
徐州工程学院毕业设计(论文)
40
[25] (日)Brain Navi 著.机器人集锦 [M].北京:科学出版社,2003
[26] (美)丹尼斯.克拉克,麦克尔.欧文斯 著,宗光华,邹慧慧译.机器人设计与制作 [M].
北京:科学出版社,2004
[27] 朱冬梅,胥北澜主编.画法几何及机械制图(第五版) [M].北京:高等教育出版社,
2000
[28] 辛一行主编.现代机械传动手册第一卷:设计基础 [M].北京:机械工业出版社,1996
[29] 《现代机械设备设计手册》编辑委员会编. 现代机械设备设计手册(第二版) [M] .北
京:机械工业出版社,2002
[30] 邱宣怀主编.机械设计 [M].北京:高等教育出版社,2003





