



机床自动夹持搬运装置(C-I)型的液压系统设计
摘要
机床自动夹持搬运装置是专用于工件与零件的夹持和自动运转的装置,其运动自由度多,而且有严格的动作顺序要求,用液压驱动可实现动作自动循环,利于自动化和高效率等要求。夹持装置用于各种工艺装备上,其中包括软金属切削机床的数字系统,自动可换夹持装置和双夹持器用来确保同时操作毛坯和加工零件。液压系统的主要夹持装置的设计,确定了液压系统各部分的功能,在分析计算的各个组成部分实现,最终完成液压原理图。
关键词: 液压驱动 双夹持器 可换夹持装置
第1章 绪论
1.1 课题的背景
20世纪40年代中后期,夹持搬运装置的研究与发明得到了更多人的关心与关注。50年代以后,美国橡树岭国家实验室开始研究能搬运核原料的遥控操纵夹持装置,这是一种主从型控制系统,系统中加入力反馈,可使操作者获知施加力的大小,主从夹持装置之间有防护墙隔开,操作者可通过观察窗或闭路电视对从夹持装置操作机进行有效的监视,主从夹持系统的出现为近代夹持装置的设计与制造作了铺垫。
自动夹持搬运装置由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的夹持装置还有行走机构。大多数工业搬运装置有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
工业夹持装置按臂部的运动形式分为四种。直角坐标型的臂部可沿三个直角坐标移动;圆柱坐标型的臂部可作升降、回转和伸缩动作;球坐标型的臂部能回转、俯仰和伸缩;关节型的臂部有多个转动关节。
夹持搬运装置特点是在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
在自动化生产领域中,工业夹持装置由执行机构,驱动,传动机构,控制系统,远程诊断监控系统五部分组成,驱动传动机构与执行机构是相辅相成的,在驱动系统中可分为:机械式,电气式液压式和复合式,其中液压操作力最大。
本课题是机床上专用于工件和零件的夹持和自动运转的装置,其运动自由度多,且有严格的动作顺序要求、用液压驱动可实现动作自动循环,利于自动化和高效率等要求。
1.2 课题的内容
本课题的基本内容是:
1)功能原理方案分析
2)液压系统原理图设计
3)液压系统的计算
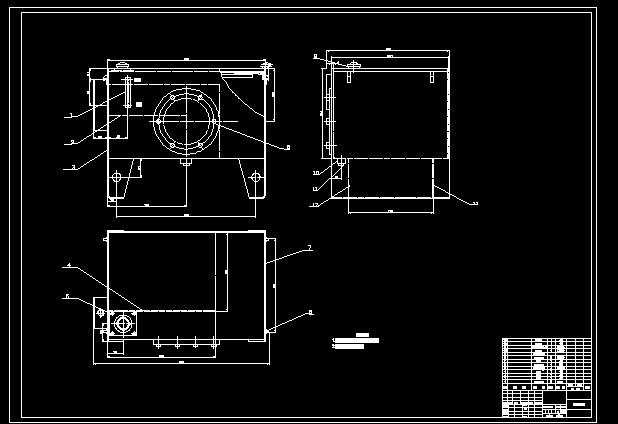
4)油箱与执行元件工作图设计
1.3 课题的意义
本课题所研究的机床的装夹装置实际上就是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。自从1962年美国研制出世界上第一台自动夹持搬运装置以来,夹持装置技术极其产品发展很快,已成为柔性制造系统(FMS)、自动化工厂(FA)、计算机集成制造系统(CIMS)的自动化工具。
广泛采用自动夹持搬运装置,不仅可提高产品的质量与产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料以及降低生产成本,有着十分重要的意义。和计算机、网络技术一样,工业自动夹持搬运装置的广泛应用正在日益改善着人类的生产和生活方式。
随着加工行业在我国的迅速发展,各行各业的自动化装备水平越来越高,现代化加工车间,常常配有自动夹持搬运装置,以提高生产效率,代替工人完成恶劣环境下危险、繁重的劳动。
第2章 自动夹持搬运装置(C-I)型的功能设计
2.1 夹持装置在液压系统中的各部分功能
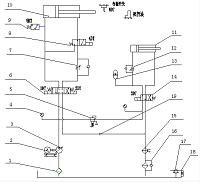
2.1.1 液压站
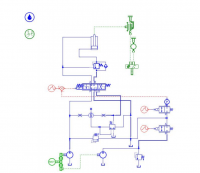
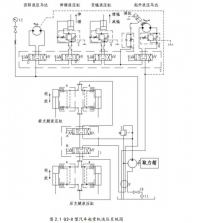
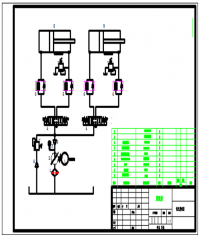
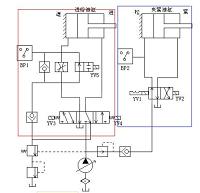
下图2-1为液压站液压原理图,本设计应用液压站供应滑板和手臂位移电液步进式驱动装置以及手腕转动、摆动机构和夹持器夹紧机构驱动装置。同时液压站能够相应于在主干线恒压下进入液压系统的耗油量来自动变化可调泵的供给量。液压站还进行油的冷却,并能防止在断路状态下液压系统中漏油。
目录
摘要 I
Abstract II
第1章 绪论 1
1.1 课题的背景 1
1.2 课题的内容 1
1.3 课题的意义 1
第2章 自动夹持搬运装置(C-I)型的功能设计 3
2.1 夹持装置在液压系统中的各部分功能 3
2.1.1 液压站 3
2.1.2 驱动装置 3
2.1.3 夹持装置的手腕转动 4
2.1.4 夹持器驱动装置 5
2.2 夹持装置在液压系统中的功能综合 5
2.3 夹持装置的电磁铁动作循环表 6
2.4 夹持装置液压系统方案设计 6
第3章 自动夹持搬运装置的液压系统机构设计计算 8
3.1 负载分析 8
3.1.1 载荷的组成和计算 8
3.2 液压马达的负载 10
3.2.1工作载荷力矩Tg 10
3.3 确定执行元件的主要参数 11
3.3.1 初选液压缸的工作压力 11
3.3.2 确定液压缸的主要结构尺寸 11
3.4 计算液压缸各工作阶段的工作压力、流量、功率 12
3.5 拟定液压系统原理图 13
3.5.1 选择液压基本回路 13
3.5.2 组成液压系统 13
3.6 选择液压元件 13
3.6.1 选择液压泵 13
3.6.2 选择电动机 14
3.6.3 选择液压阀 15
3.7 确定液压缸基本参数 16
3.7.1 工作负载 16
3.7.2 定活塞杆直径 16
3.7.3 根据速比 定出缸筒直径D 17
3.7.4 选择设计压力p 17
3.7.5 最小导向长度的确定 18
3.8 液压缸结构强度计算和稳定校验 18
3.8.1 缸筒外径缸底厚度计算 19
3.8.2 液压缸的稳定性和活塞杆强度的验算 20
3.8.3 活塞组件和密封装置 22
3.8.4 缓冲装置 22
3.8.5 油管的选择和邮箱容积的确定 23
3.9 液压传动用油选择 24
3.9.1 工作介质的选择 24
3.9.2 介质粘度的选择 24
第4章 验算系统液压性能 25
4.1 调整液压损失的验算及泵压力 25
4.2 液压系统发热和温升验算 27
4.3 选择滤油器 28
4.3.1 滤油器的要求 28
4.3.2 滤油器的种类 29
4.3.3 线隙式滤油器 30
4.3.4 滤油器在液压系统中的安装位置和维护 30
结 论 32
致 谢 33
参 考 文 献 34
参 考 文 献
[1] 徐灏.机械设计手册.第2版.北京:机械工业教育出版社,2000
[2] 路甬祥.液压气动技术手册.机械工业出版社.2002
[3] 濮良贵,纪名刚.机械设计.第7版.北京:高等教育出版社,2001
[4] 马永辉等编 .工程机械液压系统设计计算.机械工业出版社.1985
[5] 大连理工大学工程画教研室.机械制图.第4版.北京:高等教育出版社,1993.
[6] 郭向阳. 液压与气压传动. 合肥工业大学出版社.2006
[7]. 戌大先.机械设计图册(第四卷).北京:化学工业出版社,1997.
[8] 吉林工业大学等校编.工程机械液压与液力传动.机械工业出版社.1979
[9] 吴宗泽.机械结构设计.北京:机械工业出版社,1988.
[10] 工程手册编委会.机械工程手册.第6卷.北京:机械工业出版社,1982.
[11] 成大先.机械设计手册.第三版第四卷.北京:化学工业出版社,1996..
[12] 吴宗泽.机械机构设计.北京:机械工业出版社,1988
[13] 曹建东.液压传动与气动技术.北京大学出版社,2006
[14] 雷天觉 .新编液压工程手册. 机械工业出版社.1998
[15] 机械工程手册.机械工程手册机电工程手册编辑委员会编.北京:机械工业出版社,1982.
定做模具专业毕业设计请登录:http://www.bysj1.com/html/4320.html




