





















RC系列直角坐标机器人控制系统的设计与实现
摘要 RC系列工业机器人具有机器人运动控制和基于控制器的PLC逻辑控制功能,可以通过X-NET运动总线实现复杂的工业机器人运动控制功能。依据机器人系统控制轴数的区别可以分为四轴和六轴两类,文中介绍的直角坐标机器人属于四轴,主要依靠丝杆来完成运动拥有极高的精度,其本身还有可定制的导程和多变的机械形态等特点,可根据要求编写程序实时控制进行循环动作或者动作及时修改,能够满足多样化的工业需求。能够满足目前的客户对工艺场合的适当配套进行对生产工序的整合,有效的降低企业设备和人工成本的投入。
下文根据以上要求自编了PLC程序以及和触摸屏的配合,实现征整体的总线控制,并且整个控制系统已经完成调试,以完成预定要求。接触RC系列工业机器人到选择直角坐标机器人来完成自己的毕业设计,首先是接触了活动的机械轴随后是对整个控制系统的硬件和软件的自主认知,用说明手册和网络的力量来解决设计上的问题,最后根据控制系统所需要的部件信号,配合厂家的产品型号特色来达到我们所追求的可定制满足要求的控制系统。达到能够适应实际工厂应用中的需求。
关键词:直角坐标机器人;可定制;多变;实时控制
Design and implementation of Control system for RC Series Cartesian Robot
Abstract: RC series of industrial robot with robot motion control and logic controller based on PLC control function, can realize the industrial robot complex through the X-NET bus control function. According to different motion axis control robot system can be divided into four and six axis two, this paper introduces the Cartesian coordinate robot belongs to the four main shaft. Rely on the screw to complete the motion with high precision, lead itself and can be customized and flexible form of machinery and other characteristics, can be programmed according to the requirements of real-time control and modify the cycle action or action, to meet the diverse requirements of the industry.
To meet the current According to the above requirements , the PLC program and the coordination with the touch screen are compiled to realize the overall bus control , and the whole control system has finished debugging to complete the predetermined requirements .Contact with the RC series of industrial robots to select the Cartesian coordinate robot to complete their graduation design, first contact with the active mechanical shaft, and then the autonomous cognition of the hardware and software of the entire control system.The power of manual and network is used to solve the design problem. Finally, according to the signal of components needed by the control system and the characteristics of the manufacturer's product model, the customizable and satisfying control system that we pursue is achieved.To meet the needs of practical plant applications.
Keywords: Cartesian coordinate robot,customizable, variable, real-time control
目 录
第1章 引言 1
1.1 课题研究的现代价值 1
1.2 课题研究的对象 2
第2章 控制系统方案设计 3
2.1控制系统硬件方案设计 3
2.2系统控制方案设计 4
第3章 电路规范设计 6
3.1主要单元电路设计 6
3.2电路布线规范 8
第4章 PLC控制程序设计 9
4.1 PLC程序设计 9
4.2 指令编辑 11
第五章 示教器图块设计编程 21
第六章 伺服驱动器参数设置 23
第7章 调试 26
第8章 小结 28
致 谢 30
参考文献 31
附录一 示教器接线 32
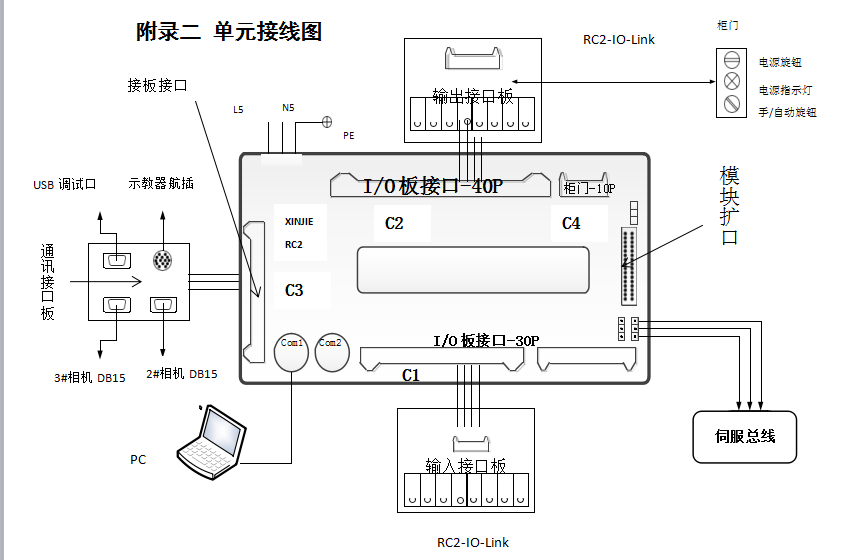
附录二 单元接线图 32
附录三 总线参数表 34
附录四 PLC程序 36
第1章 引言
1.1 课题研究的现代价值
在传统的工业领域中,工业机器可以言喻成是关在笼子中的机械怪物,具有一定的危险性。每一年的工业事故不可计数,操作中的意外也是让人防不胜防。而相对于传统而已,如今新兴的工业机器人更加的灵活与安全。并且随着时代的不断发展与进步,工业机器人的体系化的完整性也在不断提高。各方面不断完善紧跟发展,安全、环保、智能等要求也一一达到。依据现在的产业需求看来,在通过传统工业机器人达到了对精度速度重量等自动化要求后,现在技术已经达到了人机安全合作的基本要求了。随着机器人的精度的逐步提升,人们也开始通过机器人去接触去原本无法触及的领域如激光焊接或切割,过去需用专门的高精度设备来保证激光走向的正确,但现在能够通过机器人本身的准确运动来完成了。
经过机器人的不断普及以及国家的支持。如今机器人被越来越广泛的应用到各个领域,即使很多的传统工业领域中人们也在努力运用机器人代替原本人类的工作,在食品工业中也是如此。RC系列机器人中的直角坐标机器人也是如此,根据客户的要求而进行编程,配合工业现场的情况进行工作。其结构图如图1-1所示,作为定制机其形态最为丰富,是能够满足客户要求的重要的基础设备。
参考文献
[1] 吴中俊 黄永红.可编程控制器原理及应用(第二版).北京:工业出版社,2017年2月;
[2] 田宇.POD-伺服与运动控制.北京:人民邮电出版社,2010年5月;
[3] 陈公兴 陈吹信.工业机器人人机界面与示教编程.广州:华南理工大学出版社,2016年12月;
[4] 郭琼.PLC应用技术 第2版.北京:机械工业出版社,2014年5月;
[5] 郭琼 姚晓宁.现场总线技术及其应用.北京:机械工业出版社,2014年7月;
[6] 张碧波.设备状态监测与故障.北京:化学工业出版社,2011年6月;
[7] 陈亚林 陆东明.伺服系统应用技术.北京:中国铁道出版社,2015年11月;
[8] X-NET运动总线手册,内部资料;
[9] RC系列机器人控制器手册,内部资料;
[10] DS3_DS3E_DS3L系列伺服驱动器用户手册,内部资料;



