






基于焊接路径的机器人运动仿真
摘要:机器人在焊接方面应用非常的广泛,在机器人的焊接应用中,末端执行器的焊接路径规划是至关重要的,实际应用中我们需要用各类软件对焊接路径进行运动仿真,以达到我们对于焊接工件焊接的工艺要求。本文利用RobotStudio软件建立焊接机器人工作站系统对焊接机器人的焊接路径进行了运动仿真研究。
关键词:机器人, 焊接路径, 运动仿真。
Simulation of Robot Motion Based on Welding Path
Abstract: Robot is widely used in welding. In the welding application of robot, the welding Path planning of end effector is very important. In practice, we need to simulate the welding path with various software to meet the process requirements of welding workpiece. This paper establishes a welding robot workstation system with robotstudio software.
Keyword: Robot, Welding path, Motion Simulation.
第一章 绪论
1.1机器人的发展历程
自第一台工业机器人1959年在美国尤尼梅逊公司问世至今已经经历了60年了,工业机器人的技术也在向更高端更智能的方向快速发展着。从工业机器人六十年的漫长历程来看,大致分为三个阶段。第一阶段,机器人的发展初期(20世纪40年代到60年代初),这时期的机器人称之为示教再现型机器人。它是由人工输入机器人存储器中的程序控制其自动化工作,程序的编写有两种方式,一种根据机器人工作流程编写程序,一种是在机器人工作之前,由人操作机器人工作,然后机器人将工作步骤记录下来生成工作程序。第一代机器人能有效的模仿人的简单运动,对产品进行拿取安放,包装,搬运,机械加工等。
工业机器人发展的第二阶段,(20世纪60年代中期到70年代初期),这时期的机器人我们称之为感觉型机器人。这一阶段工业机器人的自动化进一步的发展 ,加入了大量的传感器,能有效的模仿人类的感官功能,对外界的信息进行反馈调整。随着市场的竞争越来越激烈,人们对产品的生产效率,生产质量的要求也越来越高。第一代机器人的单一加工已经不足以适应市场的需求,故而自动化程度,集成度更高的机器人被开发出来。随之也各类虚拟软件CAD,CAM也被应用于其中,软件与硬件结合形成了能更高效生产加工的自动化生产线。
工业机器人发展的第三阶段,(20世纪70年代后期之后)。这时期的机器人我们称之为智能机器人,这一阶段各种技术高度融合,各种设备集成,机器人向高智能化发展。随着电子技术,数控技术,计算机技术的快速发展,机器人技术在向更广更深的层面发展。在机器人技术的应用中,加工过程越来越自动化,加工方式越来越智能化,机器人系统更加的完善。
1.2我国工业机器人技术的发展现状
自机器人面世以来,越来越多的机器人技术方面的专利被申请。据调查,截至2018年6月,工业机器人技术方面的专利总量达到23054项。这其中,43%为发明专利,9946项;36%为实用新型专利,8331项;再有12%的发明授权专利,以及9%外观专利。
在申请专利的数量上,我国工业机器从2007—2017年以来总体数量是呈上升趋势。其中2014年至2016年三年间的专利申请数量是大幅上升的;而到了2017年工业机器人专利申请数量达到5608项。公开专利更是达到了6012项,是近年来的最大值。
从我国工业机器人专利技术构成来看,B25J(机械手;装有操纵装置的容器)专利申请数量排名第一,为7074项,占比达到26.63%;B23K(钎焊或脱焊;焊接;用钎焊或焊接方法包覆或镀敷;局部加热切割,如火焰切割;用激光束加工)专利申请数排名第二,专利数量为1594项,占比为6.00%;其余技术占比均在5%以下。
1.3工业机器人技术的发展趋势
目前,工业机器人技术正朝着模糊控制、智能化、通用化、标准化、模块化、高精化、网络化及自我完善和修复能力等方向进行研发。首先,模糊控制是利用模糊数学的基本思想和理论的控制方法。对于复杂的系统,由于变量太多,用传统控制模型难以正确描述系统的动态,此时便可以用模糊数学来处理这些控制问题。未来机器人的特点在于其具有更高的智能。随着计算机技术、模糊控制技术、专家系统技术、人工神经网络技术和智能工程技术等高新技术的不断发展,工业机器人的工作能力将会突破性的提高及发展。
其次,工业机器人的组件及构件实现通用化、标准化、模块化是降低成本的重要途径之一。
第三,随着制造业对机器人要求的提高,开发高精度工业机器人是必然的发展结果。
第四,目前应用的机器人大多仅实现了简单的网络通讯和控制, 如何使机器人由独立的系统向群体系统发展,使远距离操作监控、维护及遥控是目前机器人研究中的热点之一。
最后,机器人应该具有自我修复的能力,才能更好地避免因为突发状况导致的生产停顿。当出现错误指令时应该自己进行报警或调试;当元器件损坏时可以自我进行修复。
目录
第一章 绪论 3
第二章 机器人编程技术 5
2.1机器人编程 5
2.2机器人的编程环境 6
2.2.1示教编程 6
2.2.2基于robotstudio离线编程 6
第三章机器人工作站系统介绍 8
3.1机器人工作站系统 8
3.2机器人工作站系统集成的发展 8
3.3机器人工作站系统的集成 10
3.3..1机器人的选型 10
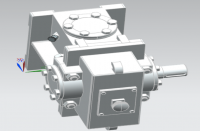
3.3.2末端执行器的选用及设计 10
3.3.3虚拟示教编程软件的选取应用 11
3.3.4外部设备的选用 11
3.3.5外部控制系统的选用与设计 11
3.3.6 机器人系统的电路配置与通信配置 12
第四章基于robotstudio弧焊机器人系统的创建 12
4.1焊接机器人介绍 12
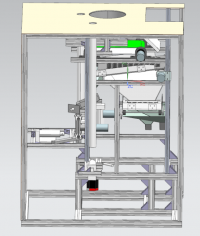
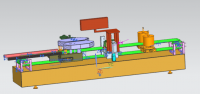
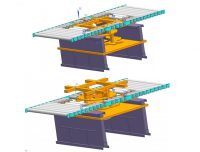
4.2构建仿真焊接机器人工作战 13
4.3机器人选型 13
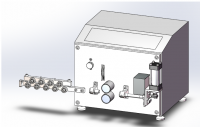
4.5送丝机的选用 15
4.6自动清枪站的选用 15
4.7焊烟净化器的选用, 15
4.8焊接电源的选用 16
4.9在robotstudio中创建机器人工作站系统 16
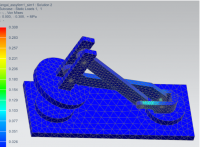
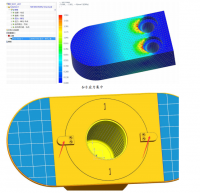
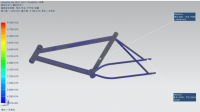
第五章、焊接机器人末端执行器路径规划及运动仿真 17
结论 17
参考文献
1 彭赛金 张红卫 林燕文 工业机器人工作站系统集成设计. 北京:人民邮电出版社,2018.9
2 连硕教育教材编写组 工业机器人仿真技术. 北京:
电子工业出版社 2018.6
3 汪丽 陈小燕 工业机器人工作站系统集成. 北京:机械工业出版社 2014.8
4 林君 基于三维图形仿真的弧焊机器人离线编程及其技术实现. 北京工业大学工学硕士学位论文 2003.5
5 熊有伦 机器人技术基础.
6 叶晖等 工业机器人工程应用虚拟仿真教程. 北京:机械工业出版社 2013.12
7 叶伯生 工业机器人操作与编程. 武汉:华中科技大学出版社 2015.12



