





















基于机器视觉的工件分拣控制系统设计
摘要:工业自动化生产中不能缺少的要素就是机器视觉。目标是将不同类型的材料或工件中的一系列操作到适当的位置。传统的旧工业流水生产线消耗大量的人力,因此本文引人机器视觉来对工件的位置和类型进行判断。与传统的手工行排序作业相比,进行排序,不仅分选效率和精度非常高,而且系统稳定,运用机器视觉的工业自动化控制,具备更大的优势。本课题研究的是基于机器视觉的PLC分拣系统,如与控制系统的设计,运动学分析,工业相机校准,图像处理,运动目标的跟踪,并且PLC分选策略。首先,总体分拣系统是专为总体规划。这些措施包括视觉控制解决方案,运动控制方案,和所需的硬件设备选择,以及PLC的编程。在此之后,详细的理论研究和设计是为机器视觉系统进行。同时,关键技术,如视觉系统的校准,目标识别和定位,图像状态的分辨率和消除重复的目标进行了详细分析。最后进行组态的设计,便于后面进行测试并方便操作,以及相关结论的得出和对未来的展望。
关键词:分拣、设计、PLC、视觉
Design of workpiece sorting control system based on machine vision
Abstract: Workpiece sorting is an indispensable part of industrial production. The goal is to categorize different types of items or artifacts into the appropriate locations. This paper makes it necessary for the visual system to judge the position and type of the workpiece. Compared with the traditional mechanical sorting operation, the use of industrial robot based on machine vision for sorting, not only efficient and accurate and stable and lasting, has a greater advantage. This research is based on machine vision robot sorting system, and for the whole control system design, Robot mathematical modeling, kinematics analysis, industrial camera calibration, image processing, moving target tracking and robot sorting strategy and other key technologies to carry out in-depth research and analysis. First of all, the whole sorting system for the overall design. These include the visual control scheme, the motion control scheme and the required hardware equipment selection work, then the robot Mathematical modeling and kinematics analysis, and finally the machine vision system for detailed theoretical research and design, at the same time, the visual system calibration, target recognition and positioning, conversion between coordinate systems,The key technologies such as elimination of repetitive targets and dynamic tracking are analyzed in detail.
Key words: Sorting, design, PLC, vision
第一章 引言
1.1课题的来源及现实意义
中国在近几十年以来,增长速度保持领先的速度。造成这种情况的主要原因是中国的政策较好和年轻劳动力的增加。然而,通过最新的统计数据,中国人口老龄化缓慢,而年轻的劳动力正在迅速下降。,因此大部分公司需要支付更多的薪酬给流水线的工人,工业成本在近几年增加的很快,因此在未来智能机器代替流水线上的工人的工作是工业必然的发展趋势。
工件的分拣是工业流水线上工件重要的组成环节。传统的工厂流水生产线上,工件分拣由工人来完成,不仅分拣的效率很低,而且有可能会影响工件的质量,甚至危害工人的生命健康,因此实现工件分拣的自动化是非常具有重要的现实意义的。工件分拣的自动化不仅能够节约大量的劳动成本,且能够快速提高生产线上工件的分拣效率,从而提高公司的产品在工业市场中的竞争力。
尽管工件分拣实现了自动化流程,但仍存在分拣的工件种类有限和分拣的精度等问题,因此本文提出基于机器视觉的工件分拣控制自动化,机器视觉是人工智能正在迅速发展的一个小部分,机器视觉就是用机器代替人眼去作判断并测量,从而达到减少公司中人工的劳动力的目标。基于机器的工件分拣控制系统能够实时分析。与传统的人工劳动分拣相比,拥有高效,稳定等巨大的优势,用机器视觉的检测方法可以有效提高工厂中产品的生产效率和生产产品的自动化程度。虽然仍有国内机器人技术较大的差距与发达国家如欧洲,美国,日本,中国已经取得了许多卓越的研究成果。据中国行业的市场需求,研究基于机器视觉的工件分拣系统,它的产业前景。这是非常广泛的,具有重要的工业价值,并且让人解放自己的双手。
当今社会,机器视觉已经越来越多的应用于工厂中的工业流水线,因为其不仅可以代替工人在工厂中流水线上机械的工作,而且可以使工人可以从危险的工厂的工作环境中解放出来,在使用工业机器使得工厂的工业成本大大降低的事实下,能够大幅提高工作效率,机器视觉的技术一直在发展中,能够使产品的质量把控更严格,使工件分拣控制系统更加智能化,从而进一步推动智能工业化的发展。
1.2国内外基于机器视觉的分拣系统发展现状
1.2.1国外研究现状
由于目前智能工业机器人的重要组成部分,在技术研究和机器视觉的发展一直在国外受重视,并已取得了相当好的成果。随着机器视觉技术的发展的迅速并且程度慢慢趋近于成熟,它在大型机器人公司的产品中已经得到了很好的应用。
例如康耐视IN-SIGHT 9000(如图1.1),作为在全球具有很高地位的机器视觉公司,致力于研发各种集成特别复杂的机器视觉技术产品,康耐视的产品在很多地区都有很广泛的应用,其所生产的机器视觉传感器和系统,在全球都有很好的销量。IN-SIGHT 9000凭借高分辨率和高超的处理图像能力,在业界很受欢迎。
目录
第一章 引言 3
1.1课题的来源及现实意义 3
1.2国内外基于机器视觉的分拣系统发展现状 4
1.2.1国外研究现状 4
1.3本课题的主要研究内容 6
第二章 控制系统整体方案设计 7
2.1控制系统结构 7
2.2控制要求 8
2.3系统方案 8
第三章 控制系统硬件设计 9
3.1可编程逻辑控制器部分 9
3.1.1西门子PLC的特点 9
3.1.2 PLC的选型 9
3.1.3 PLC I/O分配表 10
3.2工业相机部分 11
3.2.1工业相机的选择 11
3.2.2光源的选择 12
3.2.3光源控制器 13
3.3 变频器选型 14
3.4传感器和磁性开关的选型 15
3.4.1 光纤传感器 15
3.4.2磁性开关 17
3.5编码器的选型 17
3.6硬件电路设计图 18
3.7气路设计 19
3.7.1.电磁阀 19
3.7.2.气缸 19
3.7.3.气路设计图 20
第四章 控制系统软件设计 20
4.1 PLC程序 20
4.2 图像处理软件X-SIGHT 24
4.3相机与PLC的通信方式 26
4.4工件的图像处理和识别 29
第五章 组态系统设计及调试 30
5.1触摸屏的技术与应用 30
5.2触摸屏的选型 31
5.3触摸屏与PLC的通讯 32
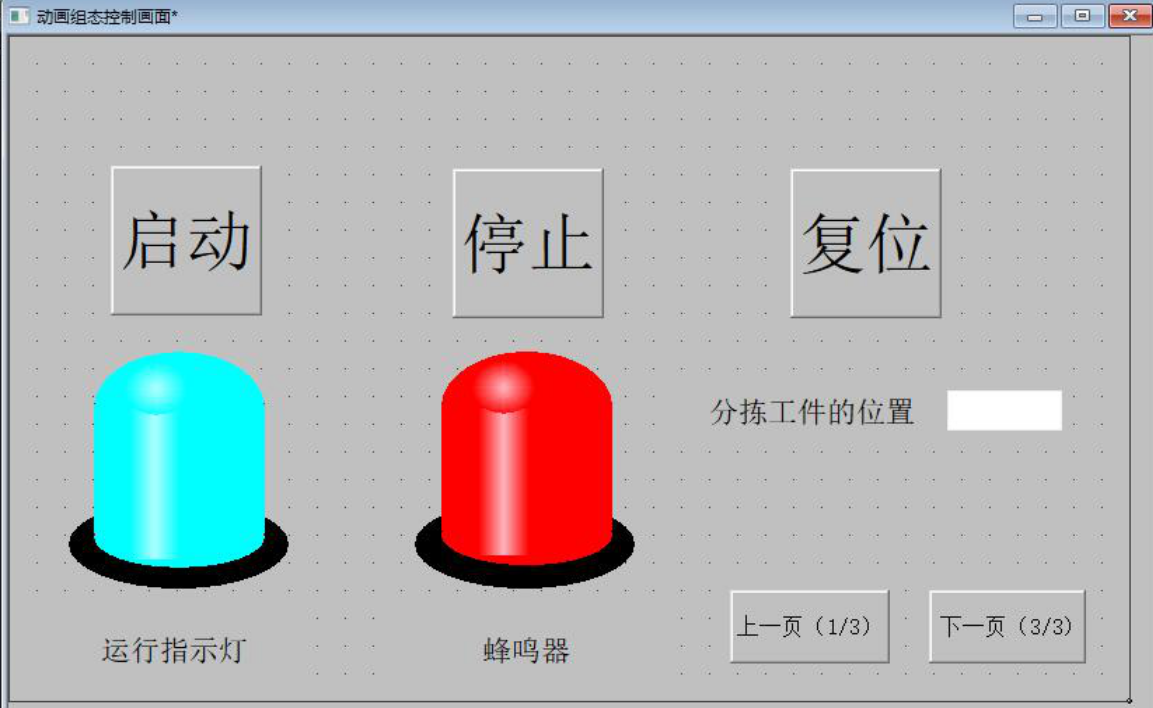
5.4组态画面的绘制及设计 32
5.5组态的调试步骤及分析 34
第六章 系统调试 35
第七章 致谢 35
参考文献 36
附录: 37
1.PLC分拣流程单元程序9 37
参考文献
[1]. 李基有. 基于PLC控制的多传感物料自动分拣系统设计 [D]. 广州:华南理工大学,2015:7-20.
[2]. 李湘伟,吴翩卉,王锐鹏 . 基于机器视觉识别的小型机器人分拣 搬运系统的研制 [J]. 机床与液压,2015,43(10):161-164.
[3]. 卓书芳 . 基于机器视觉的工业机器人分拣技术应用研究与系统 开发 [J]. 辽宁科技学院学报,2017,19(1):8-10.
[4]. 李丽丽,熊倍华,贾海龙 . 高速机器人分拣系统机器视觉技术 的应用 [J]. 装备制造技术,2016,(11):11-12,31
[5]. 黄宗杰,王富东,马红卫,等. 一款分拣搬运机器人的设计[J]. 苏州大学学报(自然科学版), 2010, 30(2): 62-66.
[6]. 麦库姆. 小型智能机器人制作全攻略[M]. 北京:人民邮电出版社, 2013.
[7]. 计时鸣,黄希欢.工业机器人技术的发展与应用综述[J] .机电 工程, 2015( 1) : 1-13.
[8]. 金桂根,穆建军.视觉识别机器人在物流作业中的智能应用 [J] . 制造业自动化,2013( 11) : 103-105.
[9]. 唐宇,吴清潇,朱枫. 平面工件的识别与定位方法研究[J] . 机 械设计与制造,2015( 10) : 172-175.
[10].夏群峰,彭勇刚. 基于视觉的机器人抓取系统应用研究综述 [J]机电工程,2014(3).
[11].李婷,柳宁.基于机器视觉的圆定位技术研究[J].计算机 工程与应用,2012,(9):153-156.
[12].潘武,张莉彦,徐俊成.基于机器视觉的工件的在线检测 [J].组合机床与自动化加工技术,2012,7(7),75-78.
[13].陈天飞,马孜,李鹏.一种基于非量测畸变校正的摄像机标定方法[J].控制与决策,2012,27(2),243-251
[14].数字图像获取、处理及实践应用/ 杨枝灵,王开主编;人民邮电出版社,2009,5
[15].计算机视觉-算理论与算法基础/马颂德,张正友主编;科学出版社,2008,2



