






四足步行机器人的结构设计及仿真
摘 要
机器人的研究和制造水平逐渐成为一个国家或者地区综合科技实力的标志。如何实现机器人在复杂环境中顺利工作一直是研究人员关注的焦点。国内外工程技术人员一直致力于研究机器人的动态步行,如何降低结构自由度并简化控制一直是研究的难点。本课题从仿生学原理出发设计了一种能实现动态步行的新型四足步行机器人。
本文对多足机器人的技术现状和特点进行了综合分析,确定了本课题的研究目标和预期结果。通过对马的对角小跑步态分析,完成了对四足步行机器人步态的分析与原理方案的设计,主要包括步行机构的原理方案和转弯机构的原理方案。
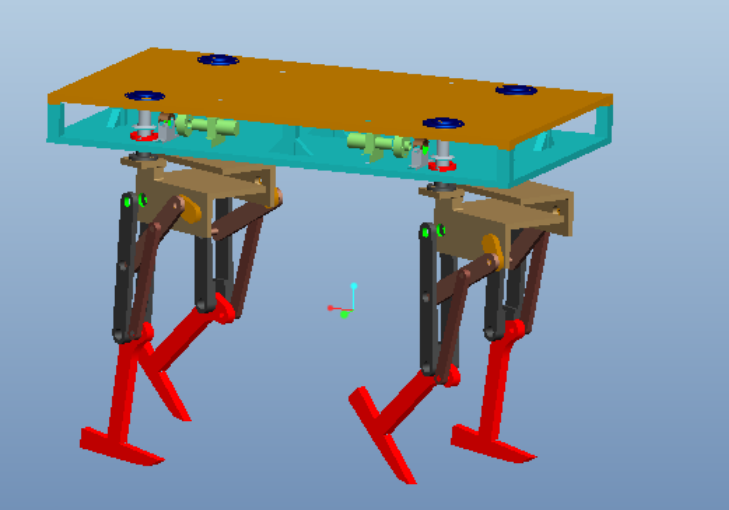
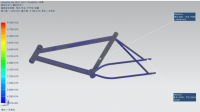
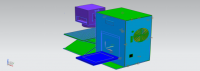
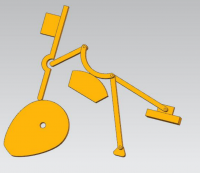
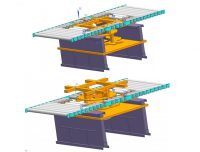
基于上述的原理方案,对步行机器人的结构进行了设计,主要内容有总体装配图设计、腿部结构设计、转弯结构设计。在机构设计完成的基础上,对齿轮轴、直齿圆锥齿轮、轴承等关键零件进行了校核计算。最后运用Pro/E软件为机器人进行了三维建模和机器人的动作过程进行了仿真。
本次设计完成的四足步行机器人在行走机构设计的基础上加入减震装置,对机器人的研究应用有一定的参考意义。
关键词:四足机器人;仿马步态;转弯机构;减震装置
ABSTRACT
The research level of robot and manufacturing has become a symbol of a country or a region's comprehensive scientific and technological strength. The robot how to realize to working in the complex environment has become the focus of researchers. All engineering and technical personnel in the world, has been committed to research dynamic walking robots, how to reduce the degree of freedom of the structure and simplifies the control has been the difficulty of the study. This topic depart from the principle of bionics and design a new type of dynamic quadruped walking robot.
This paper analyzes the technical status and characteristics of multi-legged robots, identified the topic of research objectives and expected results. Through the horse trotting gait analysis, analysis of quadruped walking robot gait and design the principles of the program, including the principles of the program and turn the principles of agency programs walking institutions.
Based on the above principle scheme, the structure of walking robots were designed, the main contents are the general assembly drawing design, structural design of the legs, turning structural design. On the basis of mechanism design is completed, check and calculate the gear shaft, straight bevel gears, bearings and other key parts. Finally using Pro/E software to make animation for the action process of robot.
The innovative design of quadruped walking robot walking mechanism and the application of shock absorber have certain reference significance to study on the robot application.
Keywords: imitation horse gait; quadruped walking robot; turning mechanism;
shock absorber
目 录
摘要 I
ABSTRACT II
第1章 绪论 1
1.1 课题研究的目的和意义 1
1.2 国内外关于四足步行机器人的发展现状 2
1.2.1 国外关于四足步行机器人的发展现状 2
1.2.2 国内关于四足步行机器人的发展现状 3
1.3 本设计的研究目标及完成的主要工作内容、预期结果 5
1.3.1 研究目标 5
1.3.2 设计完成的主要工作内容 5
1.3.3 本设计的预期结果 6
第2章 机器人的步态分析与方案确定 8
2.1 四足步行机器人的步态分析与规划 8
2.1.1 四足步行机器人的步态分析 8
2.1.2 四足步行机器人行走的步态规划 9
2.1.3 四足步行机器人转弯步态规划 9
2.2 四足机器人步行机构的原理设计 10
2.2.1 大腿连杆组的设计 10
2.2.2 小腿连杆组的设计 11
2.2.3 脚底面的设计 12
2.3 四足步行机器人总体方案的确定 13
2.3.1 设计的基本原则及目标要求 13
2.3.2 四足步行机器人的方案设计 13
2.3.3 设计方案的选择和确定 17
2.4 本章小结 19
第3章 四足步行机器人的结构设计 20
3.1 四足步行机器人腿部结构设计 20
3.2 四足步行机器人转弯结构设计 20
3.3四足步行机器人减震装置的应用 21
3.3.1 减振器的工作原理 21
3.3.2 减振器的工作原理图 22
3.4四足步行机器人整体结构方案 23
3.5 本章小结 24
第4章 重要机构部件的参数计算与校核 25
4.1 电机的计算与型号选取 25
4.2 直齿圆锥齿轮传动设计与强度校核 27
4.3 转弯机构传动轴的强度校核计算 30
4.3.1电机输出端转轴的强度校核 30
4.3.2传动轴的强度校核计算 34
4.4 轴承的寿命校核计算 37
4.4.1 电机输出端转轴轴承的寿命校核计算 37
4.4.2 转弯机构传动轴轴承的寿命校核计算 38
4.5转弯机构锥齿轮轴平键的校核计算 38
4.6转弯机构与腿部机体连接螺栓的校核计算 39
4.7本章小结 40
第5章 四足步行机器人的三维建模与运动仿真 41
5.1 概述 41
5.2 三维建模软件的介绍 41
5.3 三维建模工作的主要内容 42
5.4 本章小结 45
结论 46
参考文献 47
攻读学士学位期间发表的论文和取得的科研成果 49
致谢 50
第1章 绪论
1.1 课题研究的目的和意义
机器人技术是目前世界各国科研人员公认的的高新技术,它集合了机械设计、计算机与信息处理技术、自动化、传感器应用技术和人工智能技术等多门学科的最新研究成果,可以说机器人技术是当之无愧的机电一体化技术的综合体,所以研究人员对该领域的研究也是最活跃的。在不久的将来,科研人员对该技术的深入研究将直接推动机器人在生产生活中的推广和应用。
目前各国研究的移动式机器人主要包括轮式机器人、足式机器人和履带式的机器人。无论哪种形式的机器人都可以平稳的通过波纹比较小的地面。但是当地面波纹比较大的时候,就会使轮式机器人的能量损耗现象加重,尤其需要指出的是轮式机器人在比较软的并且波纹浮动比较大的路面上根本无法正常工作。相比之下,履带式的机器人可以在比较软的并且波纹浮动比较大的路面上移动,但机动性会降低而且这种机器人的机身也会出现明显的振动使得运动不平稳。现在研制的足式机器人正好弥补了那两种移动机构的缺陷,研究人员从动物身上得到灵感设计了很多仿生足式机器人。该机器人对路况要求相对较低,仅需要有足够的离散立足点就可以实现稳定行走,但是这类机器人一般涉及较复杂的控制系统和一些复杂的新兴科技,所以相关的技术还有待补充和完善。
足式机器人按照足的数量可以划分为分为双足机器人和多足机器人。自然界中多足动物比较常见,在自然选择的结构中存在下来,有其显著的优势。所以,多足人的研究较多,另外多足机器人的稳定性相对较好,承载能力强,控制容易实现。多足机器人的足数目前有四、六、八等。其中,足数为四的机器人与其他足数的机器人相比,具有明显的优势,例如对运动的控制形式和灵活能力,对环境的判别能力和适应能力;另外四足步行机器人不仅有很好的静态稳定性,而且还有超强的动态步行能力,所以研究人员一直很重视四足机器人的研究和发展。
本课题所设计的连杆式四足步行机器人可以承载一定的重量,由于设计的独特性使得机器人的上机体保持平动,再加上减震装置的减震效果,使得该机器人可以作为良好的运输工具。在后期再加上视觉搭载系统和传感器,便可以实现机器人对周围环境的识别功能。
1.2 国内外关于四足步行机器人的发展现状
近年来,机器人技术迅猛发展,该技术的发展和创新可以算是本世纪最重要的科研成果之一。一直到1960年以后才出现真正意义上的四足机器人。早在1965年的时候Hildobran拍下了四足哺乳动物在不同运动状态下的照片,这为之后研究动物各种步态的具体过程打下良好的基础[1]。南斯拉夫的科学家 Tomovi曾在机器人的行走过程中用到了有限状态理论,并且明确的指出机器人在行走的时候腿部要么做支撑相要么做摆动相[2]。McGhee于1968 年用步态矩阵去研究四足步行机器人的步态[3],并且给出了腿的跨距E、占空系数β、相位等重要的概念,随后他和其他学者 一起对四足步行机器人的对称步态进行了研究,并把步态公式和步态矩阵有机结合在了一起[4]。1985年中国台湾的李祖天等人给出了对称步态变量之间的数学表达式以及稳定裕度的计算方法[5]。四足步行机器人的应用前景十分广阔,然而它的步态规划和控制系统的简化一直是研究的瓶颈。如何实现机器人的机构设计与步态的统一,是目前各国学者一直讨论研究的热点问题。
1.2.1 国外关于四足步行机器人的发展现状
从机器人诞生到现在,机器技术已经从最初的示教再现演变为全新型的智能机器人,该技术的应用也逐渐变得广泛。尤其是进入20世纪80年代之后,世界各国开始纷纷设计和生产机器人产品和相关的附属工具、零部件以及成熟的技术。很多科技公司也尝试着把机器人变成具有使用价值的产品,并将这些产品推销给大学或者研究部门来帮助科研人员相互学习,从而很好的创造了这样一个互助互惠的平台。这也就使得多足步行机器人的发展方向越来越多元化。日本东京工业大学研制的TITAN系列 [6~10] 是最具有代表性的四足步行机器人,如下图1.1 所示的是目前已经成功推出的 TITAN-IX 机型,该机器人能够完成扫雷排雷的作业。
到了20世纪90年代,人们又对四足步行机器人进行了更深层次的研究,这次研究更加重视高自主性。例如微型机器人“Spider-bot”,它是由美国 NASA 研制的,可以像蜘蛛一样正常爬行于许多不规则的表面,该机器人的研究人员表示准备将其用于未来的太空探测[11],如图1.2 所示。在2006年初Cornell 大学研制成功的机器人Cornell Ranger[12]是利用电机直接来驱动踝关节运动,随后又研制出了轮足结合的月球步行机器人ATHLETE[13](图1.3 )和用于军用作战运输的步行机器人BigDog[14](图1.4 )。
图1.1 四足机器人 TITAN-IX 图1.2 四足机器人 “Spider-bot”
图1.3 四足步行机器人 ATHLETE 图1.4 美国的大狗 Bigdog
另外,还有一些国家的研究人员也取得了显著的研究成果。例如,2005年的时候,韩国庆北大学设计的一种新型机器人ELIRO-Ⅱ模仿蜥蜴的运动机理 [15,16] ,可以在光滑的墙壁上爬行。被广泛应用于商业生产的步行机器人中最成功的是 Lynxmotion公司研制的[17],该机器人的步行机构采用一个平面四杆缩放机构,而且每个机械腿都只具有二个自由度却成功实现了机器人的前进、后退、左右转弯,另外该机器人最具创新的地方就是它的记忆体有一半是留给客户去自由支配的。
1.2.2 国内关于四足步行机器人的发展现状
我国开始研究机器人比较晚,但是不可否认的是我国的机器人技术进步还是比较快的,已经取得不错的成绩的领域有工业机器人、特种机器人和水下机器人等等。针对四足步行机器人,上海交通大学机器人研究所研制的二种四足步行机器人比较典型,如图1.5所示。(a)图所示的是利用平面四杆机构作为腿部机构的四足步行机器人,该机器人可以完成跨越障碍和爬楼梯等多种高难度动作,这个机器人还能实现对周围环境的识别和相应步态的调整;(b)图所示的能够实现对角动态步行的四足机器人的步行机构是开环关节连杆机构, 在该机器人的每个足底均使用压电薄膜式力传感器来进行信息反馈。
(a)四连杆爬行机器人 (b) 多关节四足机器人
图1.5 由上海交通大学自主研发的两种四足步行机器人
另外,图1.6所展示的是清华大学机器人研制成功的两种四足机器人。下图(a)所展示的四足步行机器人起名为 QW-1,这是由清华大学机器人实验室最先推出的一个机器人,研究人员把平面四杆缩放机构作为该机器人的步行机构,机器人的全方位感应是通过脚底的压力传感器来实现的;图(b)所示为清华大学相继推出的仿蛙机器人,它的步行机构是开环连杆机构,该机器人可以实现上下坡和越障,即使在复杂的地面上仍然具有稳定的自主行走能力。
(a)QW-1 (b) 仿蛙机器人
图1.6 由清华大学自主研发的机器人
在2004年, 图1.7所示的是由华中科技大学自主研发的具有手臂融合机构的“4+2”步行机器人[18,19]。该步行机器人正常行走的时候才用六条腿协调运动,当需要进行工作任务的时候就会抬起前两条腿来变成机械手进行工作,另外四条腿则保持协调运动或者起到支撑架的作用。其外形尺寸为1240 mm×920 mm×550 mm。该机器人即能行走又能完成机械手功能的这一设计思想充分体现了机器人的多运动形式和多功能性。华中科技大学、xxx工程大学、xxx工业大学等高校也一直设计和研究四足步行机器人。例如哈工大研究人员巧妙的采用蜗轮蜗杆传动作为四足机器人的步行机构,如图 1.8 所示。
图1.7手脚融合型机器人 图1.8 涡轮蜗杆传动型机器人
1.3 本设计的研究目标及完成的主要工作内容、预期结果
1.3.1 研究目标
本课题为主要用于在一定波形路面上行走的新型四足步行机器人的结构设计及仿真。首先应该对现有的四足步行机器人的运动原理和结构形式进行了解和分析,其次明确本次的设计任务,并采用合理的方法来完成四足步行机器人总体方案的设计。最后对机器人重要部位进行创新设计从而更好地满足机器人的功能要求。
首先,现在国内外研制的四足步行机器人的结构一般相对简单,但是控制系统复杂,并且研究静态步行的机器人较多,很少有对动态步行的研究。所以本设计的目的在于简化结构的同时也相应的简化控制系统的设计,增加该类步行机器人的功能多样性,使得其适应性更强,成本更低,更加适用于市场推广。
另外,本设计的一大特色是采用模块化设计思想。本设计中机器人的腿部结构可根据工况的变化而更换。比如,采用可在水平地面上的稳定行走的摩擦系数较大的轮式足结构;用连杆结构,可实现在多障碍场合进行轻松越障的行走工作,其实现形式就是在小腿部位换装不同结构的脚部结构。在本次设计中只采用一种结构,即通过设计一种合理的曲线来保证机器人行走时的腰部始终在同一水平线上的脚底形状。
1.3.2 设计完成的主要工作内容
1、四足步行机器人总体方案的确定与相关参数的确定
(1)对目前现有的四足步行机器人查阅了相关的资料,全面地了解国内外的发展现状。先初步对四足步行机器人的总体方案进行确定,其任务主要包括步行机器人的整体结构、转弯机构的部分结构及步行机构的部分结构的方案设计,并简单叙述了最佳方案选择的全过程。
(2)确定四足步行机器人总体方案的重要参数,主要包括机器人总体的结构尺寸、步行机构的尺寸、转弯机构的尺寸,各个驱动部分电机的选择,相关零部件参数的选择和校核计算等等;
2、四足步行机器人结构的设计
(1)总体结构的设计,规划本课题设计的步行机器人的行走及转弯步态,设计机器人四条腿的协调运动等等;
(2)步行机构的设计,主要包括传动装置、小腿部分结构的设计,阐述机构工作原理,确定传动方案;
(3)转弯机构的设计,主要包括转动机构传动装置的设计,阐述工作原理,确定传动方案。
3、四足步行机器人主要零部件的校核与相关零件和元器件的选择
(1)进行相关零部件和元器件的选择,包括电机选型、滚动轴承型号等;
(2)直齿圆锥齿轮的尺寸参数的确定和强度校核的计算;
(3)传动轴材料的选择、结构尺寸的设计及强度的校核计算;
(4)轴承强度的校核与寿命的计算;
(5)螺栓组强度和使用寿命的相关校核。
4、四足步行机器人的工程图绘制
按照机械制图的规范和要求来绘制四足步行机器人的总体装配图、步行机构的部件图和相关零件的零件图,用手工及计算机出图。
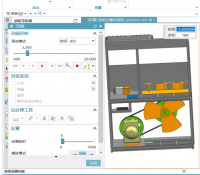
5、四足步行机器人的三维建模与仿真
通过三维模型的建立,可以避免机器人装配时存在的干涉和尺寸不合适等问题,并且做了运动动画,生动形象的了解该四足步行机器人运动过程。并与现有的同类步行机器人进行比较分析,从中找出本机器人的不足之处,并再次进行优化达到提高本机器人性能的目的,从而满足本设计所要求的目标,得到具备高灵活性、高效率的四足步行机器人的本体结构设计,从而实现小跑步态。
1.3.3 本设计的预期结果
本设计要求最终能够实现的预期目标主要是:确定总体方案,选择适合的电机型号,完成步行机器人的总体结构设计,使步行机构和转弯机构能够相互配合运动,从而让四足步行机器人实现小跑步态运动和避障等功能。
要求该四足机器人的步行机构能够实现机器人四条腿的协调运动,保证四条腿及转弯机构能够在抬起的时候不会使机器人整体倾覆,并要求在运动过程中始终保证机器人的相对稳定性。
四足步行机器人的四个步行机构分别采用一个电机驱动一个机械腿的形式是为了保证机器人在运动过程中控制更加方便可靠和使得相互之间耦合关系减弱而加上去的,该机器人每条腿的结构相似,四条腿之间相互配合运动,进而保证四足步行机器人相对稳定的运动。
本课题设计的四足步行机器人的脚部机构不仅要尽量保证在支撑时与地面始终接触,还要要求支撑腿在支撑过程中配合摆动腿进行蹬地运动,保证步行机器人在行走时的协调运动。
参考文献
[1]Song. S. M. Kinematic optimal design of a six-legged walking machine[D]. Ph. D dissertation, The Ohio State University, Columbus, OH, 1984
[2]R. Tomovic, R.B. McGhee. A finite state approach to the synthesis of bioengineering control system. IEEE Trans. On Human Factors in Electronics.vol.HFE-7, NO.2.1986
[3]R. B. McGhee. Some finite state aspects of legged locomotion. Mathematical Biosciences.1968, 2(2):67-84.
[4]R. B. McGhee, A. A. Franck. On the stability properties of quadruped creeping gaits. Mathematical Biosciences.1968, 3(3):331-351.
[5]Tsu-Tian Lee, Ching-Long Shih. A Study of the Gait Control of a Quadruped Walking Vehicle. IEEE Journal Robotics Automation.1986, RA- 2 (2):61-69.
[6]Keisuke ARIKAWA, Shigeo HIROSE. Development of Quadruped Walking Robot TITAN V-III[J]. Proc. IROS 96.0-7803-3213-X/96/$5.00 1996 IEEE,208-214.
[7]Keisuke KATO, Shigeo HIROSE. Development of Quadruped Walking Robot, TITAN IX[J]. Proc. IROS 96.0-7803-6456-2/00/$10.00 2000 IEEE,40-45.
[8]A. E. Cocosco, Control of walking in a quadruped robot with stif legs. M. Eng. Thesis, Mc Gill University,1998,7.
[9]広瀬茂男 , 長久保晶彦 . 歩行型壁面移動ロボット , 日本ロボット学会誌 , 10, 5,pp. 1992:575-580.
[10]広瀬茂男,竹内 裕喜.ローラウォーカ:新しい脚-車輪ハイブリッド移動体の提案, 日本機械学会誌, 62, 599, pp. 1996:242-248.
[11]陈学东. 多足步行机器人运动规划与控制[M]. 武汉:华中科技大学出版社, 2006:2-18.
[12]Tee T W, Low K H, Ng H Y. Mechanics Design and Gait Implementation of a Quadruped Legged Robot [J]. Robotics and Vision, 2002: 1-4.
[13]Collins C. Stiffness modeling and force distribution for the all-terrain hex-limbed extra-terrestrial explorer (ATHLETE)[C]// ASME 2007 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Las Vegas, USA, 2007: 1-9.
[14]Playter R, Buehler M, Raibert M. BigDog [C]// Proceedings of SPIE - The International Society for Optical Engineering, Kissimmee, USA, 2006: 623-629.
[15]Park S,Lee Y.J. Discontinuous zigzag gait planning of a quadruped walking robot with a waist-joint [J].Advanced Robotics,2007, 21(1) :143-1642.
[16]Park S,Kim D.S,Lee Y.J. Discontinuous spinning gait of a quadruped walking robot with waist-joint [A].Proceedings of IEEE International Conference on Intelligent Robots and Systems[C]. 2005: 2744-2749.
[17]马彪.一种四足步行机器人结构设计与分析[D].北京交通大学硕士学位论文.2006:1-8.
[18]苏军.多足步行机器人步态规划与控制的研究[D].硕士学位论文,武汉:华中科技大学,2006.
[19]苏军,陈学东,田文罡.六足步行机器人全方位步态的研究[J].机械与电子, 2004(3):48-52.
[20]M.Hildebrand. Analysis of asymmetrical gaits. Journal of Mammalogy , 1997: 131~156.
[21]E. Muybridge. Animals in Motion . Dover Publications Inc, New York, 1957.
[22]P. M. D. L. Croix. The evolution of locomotion in mammals . Journal of Mammalogy , 1976:51~54.
[23]M. Hildebrand. The adaptive significance of tetrapod gaits selection. American Zoologist, 1977,Vol.20: 97~103.
[24]A.I. Dagg, A. de Vos, The Walking Gait of Some Species of Pecora, J. Zool. London, 1968:103–110.
[25]M. Hildebrand, Analysis of Tetrapod Gaits: General Considerations and Symmetrical gaits. Neural control of locomotion, Plenum Press, New York, 1976:203~236.
[26]余联庆, 吴昌林, 马世平. 基于时序分析的四足机器人对称步态变换. 华中科技大学学报, 2006,34(9):32-34.
[27]杨恩霞.机械设计[M].xxx:xxx工程大学出版社,2008.
[28]杨恩霞,刘贺平.机械设计课程设计[M].xxx:xxx工程大学出版社,2012.7
[29]Parametric Technology Corporation. Pro/Toolkit User's Guide[M].USA:PTC, 2001.
[30]汪硕,梅琼风,姜昆,周雄辉.基于Pro/E的智能化标准件库开发[J].模具技术,2010(4):5-9.



