





















荧光笔产线自动排序机构设计与运动仿真
摘要
自动化生产线是由传送系统和控制系统组成的,还它将自动和辅助生产设备按照一定的工艺顺序连接起来,能够自动地完成一个产品整体或者其一部分制造过程。如今制造业规模十分庞大,企业为了保证和提高其产品质量,不断地提高生产效率,创造着越来越多的财富价值,大大提高了我国工业生产的效率,提升了我国的经济水平,显著改善了人们的生活条件与生活水平,为我国工业后来的发展与腾飞打下了坚实的基础。
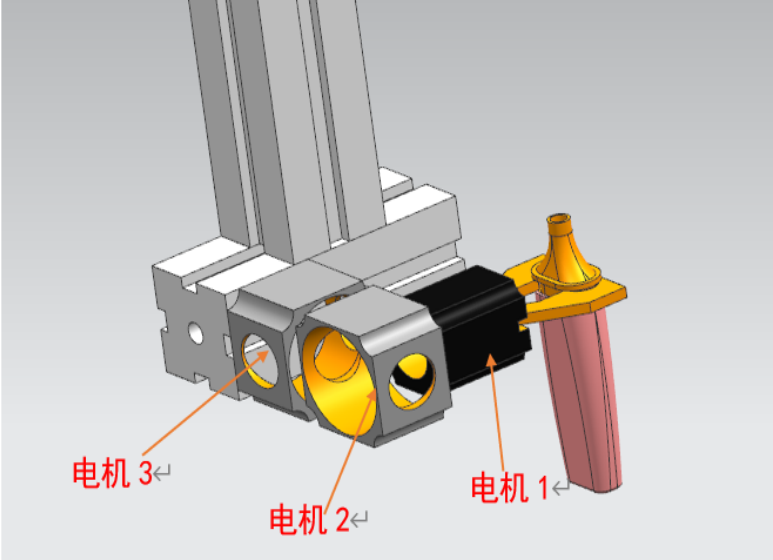
本文主要针对荧光笔生产线上的自动化设计了一个自动化排序机构,采用三直线轴,两旋转轴共五轴机构完成所有动作。该机构采用机械手夹取荧光笔,并用电机驱动,在其手腕部设置三个步进电机,其中一个电机控制手爪的加紧与张开,另外两个电机控制手部的旋转,三直线轴实现机械手在空间中的移动。相连接的机械臂互相垂直,机械臂1固定在地面不动,机械臂2可以控制机械手沿X轴方向平行移动,机械臂3可以控制机械手沿Z轴方向上下移动,机械臂4可以控制机械手沿Y轴方向平行移动,还有在两个平面内的转动电机2控制手爪在XOZ平面内的转动,电机3控制手爪在YOZ平面内的移动),一共有5个自由度。这两个平面内的旋转运动配合机械臂在空间内三个方向上的直线运动完全可以实现荧光笔在空间中的姿态调整。荧光笔从落料漏斗中无序地落在传送带上,经过导向槽以四种状态进入治具,然后根据传感器决定机械手抓取位置,图像设备系统采集荧光笔的朝向,抓取荧光笔后上升至一定高度,根据荧光笔的被抓取时的朝向,旋转调整荧光笔,调整好荧光笔的方向后,插入治具,然后进入下一循环。该机械手可通过PLC编程控制实现其自动化排序功能,大大减轻了人们的劳动强度。
关键词:机械手 步进电机 传感器 图像识别
Abstract
Automatic production line is composed of transmission system and control system, and it connects automatic and auxiliary production equipment according to a certain process sequence, which can automatically complete the whole or part of the manufacturing process of a product. Now manufacturing scale is huge, the enterprise in order to guarantee and improve the quality of its products, continuously improve the production efficiency, attaches great importance to the height of the production process automation, industrial manipulator is a important part of automation production line, and gradually recognized by more and more manufacturing enterprises and USES the, let its services in industrial production and manufacturing, to create the value more and more wealth, the reflects China's industrial automation level increased significantly.
In this paper, an automatic sorting mechanism is designed for the automation of the highlighter pen production line. Three straight spool and five axis mechanism are adopted to complete all the actions. The mechanism USES a manipulator to pick up the fluorescent pen and is driven by a motor. Three stepping motors are set on the wrist. One motor controls the tightening and opening of the hand claw, and the other two motors control the rotation of the hand. Connected perpendicular to each other, mechanical arm manipulator fixed on the ground motionless, 1 2 can control the manipulator robot arm along the X axis parallel to the direction of movement of the mechanical arm 3 move up and down along the Z axis direction, can control the manipulator robot arm 4 can control the manipulator, and the rotation of the motor in two plane 2 control hand claw rotation in XOZ plane, motor 3 to control the movement of gripper in YOZ plane), a total of five degrees of freedom.It has greatly improved the efficiency of China's industrial production, enhanced China's economic level, significantly improved people's living conditions and living standards, and laid a solid foundation for the later development and take-off of China's industry Fluorescence pen from dropping funnel of a disorderly fall in the conveyor belt, a guide groove to four state into the fixture, and then determined according to the sensor manipulator grasping location, image acquisition of fluorescent pen toward equipment system, rose to a certain height after fetching the fluorescent pen, according to the fluorescence pen was fetching orientation, rotating adjust fluorescent pen, adjust the direction of the fluorescent pen, insert the fixture, and then into the next cycle. The manipulator can realize its automatic sorting function through PLC programming control, which greatly reduces people's labor intensity.
Key words: Manipulator Stepper motor Sensor Image recognition
目录
第一章 绪论 6
1.1 选题背景及意义 6
1.2 国内外研究情况 6
1.3 研究的主要内容 7
第二章 自动排序机构总体方案确定 8
2.1机械手夹取物(荧光笔)简述 8
2.2 旋转机构的动作规划 8
2.3自动排序机构整体运动过程 10
2.3.1 传输带上进料 10
2.3.2 机械手抓取荧光笔 11
2.3.3 荧光笔插入工位槽 14
2.4总体方案 14
2.4.1 自动排序机构驱动方式的确定 14
(1)气压驱动 14
(2)液压驱动 15
(3)电机驱动 15
2.4.2 手部方案的确定 15
2.4.3 手臂方案的确定 15
2.4.4 手腕方案的确定 16
2.5本章小结 17
第三章 自动排序机构相关设计计算 18
3.1手部设计计算 18
3.1.1 夹紧力的计算 18
3.1.2 驱动力的计算 19
3.2电机概论与选型 20
3.2.1 步进电动机概论 20
3.2.2 步进电动机选型 21
3.3本章小结 22
结论 23
致谢 24
参考文献 25
第一章 绪论
1.1 选题背景及意义
自动生产线是由工件传送系统和控制系统,将一组自动机床和辅助设备按照工艺顺序联结起来,自动完成产品全部或部分制造过程的生产系统。
在荧光笔自动化生产线中,工件传送采用传输带进行输送,运动过程比较平稳并且连续性比较好,对于不同工件,其工艺要求也不尽相同,相邻两道生产工序之间的运作时间有些许差别,为了能够满足生产的工艺要求,必需要改变相邻两个工件之间的间距或者将其一次排列好放置在特定的工作槽里,以为接下来的工序的工艺做好准备。如需要将无规律堆叠码放在一起的工件分批依次放置在下一道加工工序中的工位槽里,目前主要是靠人工操作,工人手工操作,将荧光笔从盛放的容器里取出来再摆放到工位槽中,采用人工操作不仅浪费大量的时间和精力,而且工作效率还比较低,摆放的质量还很容易受个人为工作状态的影响,容易出现摆放的时候遗漏、错摆的现象。本次设计目的在于提供能对工件自动排列、并能自动将工件放入指定位置的荧光笔产线自动排序机构。本机构主要由机械手、传送带、治具、传感器、图像设备系统等组成,实现荧光笔排序的自动化和无人化,以及高效化。本设计能够应用到企业生产线,满足企业对于荧光笔产线自动化生产的要求,从而大大推动社会经济的发展。
1.2 国内外研究情况
伴随着社会老龄化的增加,年轻劳动力的大幅减少,导致人工的成本大幅提升,企业难以承受高昂的劳动力成本,迫切希望找寻降低成本的方式,于是在工厂中实现生产的自动化,无人化就成为了一种迫切的必然的需求。工业自动化的兴起与不断发展以致繁荣解决了生产生化中的诸多问题,这是就是工业自动化生产为什么能够盛行的最主要的原因。
美国是世界上最早开始研究自动化的,并把它应用于工业当中的,美国的Unimate 公司联合斯坦福大学、麻省理工学院联合研制生产了一些精度高、可靠性好、低成本的机械手,其平均可以平稳且无故障运行1500 小时,其中有一种新型机械手Unimate-Vic-arm ,它的误差小于±1mm,在当时看来,误差是相当小的,在其内部装有小型计算机,可以通过其来控制机械手的运动。
日本自从1969年从美国引进两种典型的机械手后,大力开展机械手的相关研究,到1979年时日本从事机械手相关研究与生产的院校、研究单位达50多家,至1979年时生产机械手数量达56900台,1990年时有55万台机械手,其工业机械手发展速度之快,拥有量之多无不让人惊叹,并且其生产的机械手最主要的使用途径是在汽车生产制造当中替代人工来完成相关加工制造要求,到目前为止,日本拥有世界上最多的工业机械手,且其机械手的拥有量每年还以较高速度在持续增长。
自20世纪70年代开始,中国的工业自动化才刚刚起步,各方面都十分落后,得益于苏联的技术援助,我国工业自动化一点一点地积累发展。在1972年,在上海,第一台机械手被成功研发出来,随之全国各地都投入机械手的设计,研发和生产浪潮中。从七五计划(1986-1990)开始,我国政府将工业机器人的发展与应用列入其中,成为国家的一个战略目标,并且投入了大量的资金给科研人员和相关产业,以此来支持我国工业自动化的发展,科研人员合力攻坚,研发了一大批工业机械手,分别应用在不同的生产和生活领域,大大提高了我国工业生产的效率,提升了我国的经济水平,显著改善了人们的生活条件与生活水平,为我国工业后来的发展与腾飞打下了坚实的基础。近几年,娃哈哈集团为了转型升级发展需要,也开始往自动化,智能化方向发展,研究开发机器人的应用,成为行业的排头兵。富士康集团一直在从事着机器人方面的研发与生产,打算在几年之内推出一个全自动化的工厂,从而实现自动化生产。
1.3 研究的主要内容
针对荧光笔产线存在大量需要人工来操作的环节这一情况,本文提出一个荧光笔产线自动排序机构,研究内容有以下几部分:
(1)对荧光笔的形状特征与其落在传输带上的运动状态进行分析,为确定自动排序机构的总体设计方案提供依据;
(2)根据荧光笔的特点,结合自动排序机构的实际的工作要求,完成荧光笔产线自动排序机构总体设计方案,为其后续的结构设计奠定了基础。
(3)根据荧光笔产线自动排序机构的总体设计方案,结合荧光笔自身的形状结构特点,对机械手手爪,手腕等进行结构设计,并选用合适的电机。
参考文献
[1] 菜自兴.机器人学的发展趋势和战略[J]. 机器人技术与应用,2001(4):11-16.
[2] 于靖军,刘辛军等.机器人机构学的数学基础[M]. 北京:机械工业出版社,2008(6):25-30.
[3] 张平霞,朱永强.钢板弹簧抓取机械手运动仿真[J].拖拉机与农用运输车,2013 20-22.
[4] 李文明.曲轴搬运机械手的研究与设计[D]. 武汉:华中科技大学,2007.
[5] 巩云鹏,田万禄,张祖立.机械设计课程设计[M].沈阳:东北大学出版社, 2011.
[6] 成大先.机械设计手册[M]. 北京:化学工业出版社,2007.11
[7] 马履中,谢俊等.机械原理与设计[M]. 北京:机械工业出版社,2015
[8] 李天声,侯金水,胡承愚.机械设计基础[M]. 合肥:中国科学技术大学出版社,2008
[9] 闫华,刘极峰.面向空间焊缝的弧焊机器人焊接路径自动轨迹研究[J].机械设计与制造,2006, (1): 106- 107.
[10] 机械设计手册编委会.机械设计手册[M].北京:机械工业出版社,2004:
125-239.
[11] K.A.Tahboub.Natural and Manmade Share Control Systems: An Overview,Proceedings of the 2001 IEEE, International Conference on Robot and Automation,2001.
[12] R.L.Wernli. AUV'S-The Maturity of the Technology. OCEANS' 99 MTS/IEEE Coference Proceedings.
[13] Basilio Bona and Aldo Curatella. Identification of Industrial Robot Parametersfor Advanced Model- Based Controllers Design Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain, April 2005



