








自动生产线旋转平台的设计-- 浴缸上釉生产线旋转平台
摘 要
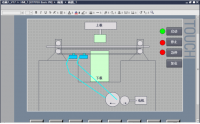
旋转机构是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。旋转机构的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流电机、变频器、传感器、等电子器件组成,由可编程控制器操控。该装置涵盖了可编程控制技术,位置控制技术、检测技术等。本文介绍的旋转机构是由PLC输出三路脉冲,分别驱动横轴、竖轴变频器,控制旋转机构横轴和竖轴的精确定位,微动开关将位置信号传给PLC主机;位置信号由接近开关反馈给PLC主机,通过交流电机的正反转来控制旋转机构手爪的张合,从而实现旋转机构精确运动的功能。本课题拟开发的施釉旋转机构可在空间抓放物体,动作灵活多样,可代替人工的劳累、繁杂、重复的工作,并可根据工件的变化及运动流程的要求随时更改相关参数。
关键词:旋转机构 PLC 可编程控制器 釉
Abstract
Industrial robot manipulator is the task of traditional system, is one of the key components of robot. Mechanical structure of the manipulator using ball screw, slider, machinery parts, Electrical motor, ac inverter, is composed of electronic devices, such as the sensor. This device covers a programmable control technology, the position control technology and testing technology, etc, and is the typical electromechanical equipment. The paper introduced by PLC output manipulator is 3 pulse, respectively, the vertical axis inverter driving distrbution, control and vertical axis of the robot distrbution precise positioning, micro switch will position signal to PLC host, Location signal by proximity switch feedback to PLC host, through the ac motor is FanZhuanLai control of the robot hand, so as to realize the manipulator zhang precise movement function. This subject to the material handling in space manipulator can be caught, flexible put objects, can replace artificial in high temperature and dangerous section for homework, and according to the motion process workpiece and requirements of related parameters change at any time.
Keywords: manipulator PLC controller manipulator glaze
目录
摘 要
Abstract
第1章 引言………………………………………………………………………………………3
1.1浴缸陶瓷行业对旋转机构的需求……………………………………………3
1.2 国内外对旋转机构的研究状态………………………………………………3
1.3 现代研究趋势……………………………………………………………4
1.4 PLC应用简介…………………………………………………………………5
第2章 旋转机构的一般知识……………………………………………………7
第3章施外釉旋转机构驱动方式的确定…………………………………………………10
3.1气压驱动…………………………………………………………………………10
3.2 液压驱动…………………………………………………………………11
3.3 电机驱动…………………………………………………………………11
第4章 施外釉旋转机构工艺、机械描述…………………………………………………12
4.1 工艺要求………………………………………………………………………………12
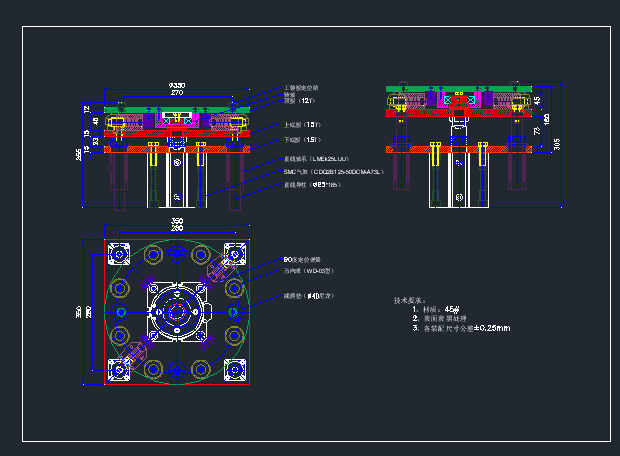
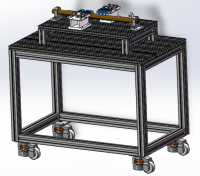
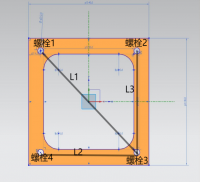
4.2 机械装配………………………………………………………………………………13
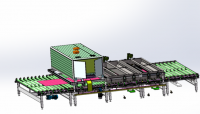
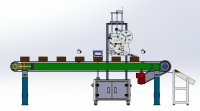
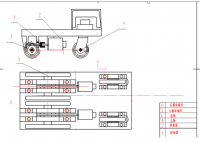
4.2.1 施外釉旋转机构配套设施的机械动作流程………………………………………13
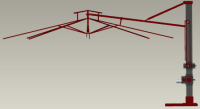
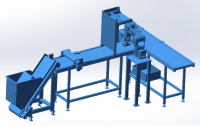
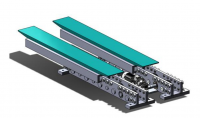
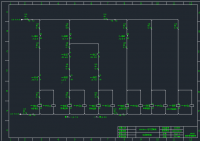
4.2.2 施外釉旋转机构的机械结构和电气设备的布置………………………………14
第5章 电气元器件的选择…………………………………………………………………16
5.1材料工艺要求……………………………………………………………………………16
5.2使用要求………………………………………………………………………………16
5.3经济要求………………………………………………………………………………17
5.4零件要求………………………………………………………………………………17
5.5电机的选择………………………………………………………………………………18
5.5.1 根据生产机械的负载性质来选择电动机的类型…………………………18
5.5.2电动机电压等级的选择………………………………………21
5.5.3电动机额定转速的选择………………………………………21
5.5.4电动机结构形式的选择 ………………………………………22
5.6 PLC的选择………………………………………………………………………………23
5.6.1PLC的适应范围…………………………………………………23
5.6.2如何选择PLC…………………………………………………24
5.7PLC使用中的抗干扰措施………………………………………………………………25
5.7.1PLC的工作环境…………………………………………………25
5.7.2PLC的抗电源干扰…………………………………………………25
5.7.3PLC的I/O信号干扰防范…………………………………………………26
5.7.4PLC外部配线干扰防范…………………………………………………26
5.7.5PLC的控制接地…………………………………………………27
第6章 施外釉旋转机构的电气原理设计…………………………………………………28
6.1PLC的输入输出端口配置表……………………………………………………………28
6.2施外釉旋转机构的主电气原理图说明……………………………………………………30
6.3施外釉旋转机构的动作流程图……………………………………………………………31
6.4旋转机构驱动的施外釉的梯形图…………………………………………………………34
经济分析报告………………………………………………………………………………35
致谢……………………………………………………………………………………………40
参考文献………………………………………………………………………………………41
1、引言
1.1浴缸陶瓷行业对旋转机构需求:
浴缸陶瓷生产一般分为三个主要工序:原料、成型和烧炼。成型是劳动密集成的简单机械劳动,很适应旋转机构完成。
在浴缸陶瓷制品的二不休表面上,一般都要浇上一层粉磨得很细的,由长石,石英,粘土以及其他矿物组成的物料,这层物料经高温培烧后即成为与二不休牢固地结合在一起的一薄层下班态物质。这一玻璃态物质称为釉。釉一般具有光亮、半透明度、圆滑和不透水等性质 。制品施釉后,表面不易沾污,弄脏后也容易洗涤干净。此外,釉还可遮盖二不休上的某些瑕疵,幸美观大方,起着装饰的作用。
作为釉所使用的物料 ,即通常所谓的釉料,一般都制成泥浆状,利用干燥二不休的吸水性使之粘附在二不休表面现象上。施釉的方法很多,其中主要有浇釉,浸釉和喷釉等几种。目前施釉操作还有不少是借助于简单的设备用手工进行的,也有一些半自动的施釉机械。
由于工人的熟练程度和生产经验存在差异,再加上疲劳程度和工作状态的影响,难以保证施釉质量的稳定,另外手工施釉工作条件恶劣,影响工人身体健康,因此必须利用高新技术对我国的浴缸陶瓷企业进行改造
目前,由于浴缸陶瓷生产是低附加值的行业,很难支持高科技的装配,价格太高的装备无法在这一行业中广泛推广。如果能设计一套成本不高,结构简单,功能相对独立的旋转机构,一定能得到市场认可。
1.2国内外对于旋转机构的研究现状:
近年来,随着人类活动领域的进一步扩大,人们对非制造业用旋转机构的研究空前活跃起来。这些行业与制造业相比,其主要特点是工作环境的非结构化和不确定性,因而对旋转机构的要求更高,需要旋转机构具有对外感知能力以及局部的自}规划能力等。
我国的旋转机构研究与开发工作起步较早,曾经有过一些成果,但在产业化和应用上,一直步履维艰。改革开放以来,通过“七五”、,’/又五”科技攻关,目前基本掌握了旋转机构的设计制造技术、控制系统硬件和软件设计技术、运动学和轨迹规划技术,生产了部分旋转机构关键元器件,开发出了喷漆、弧焊、装配、搬运等旋转机构.但是,我国的旋转机构技术及其应用程度和发达国家相比还有很大的差距,如:可靠性低于国外产品;旋转机构应用工程起步较晚,应用领域窄,生产线系统技术与国外比有差距;在应用规模上远远赶不上发达国家。以上原因主要是没有实现旋转机构的高度产业化。当前我国旋转机构的生产几乎都是应用户的要求,“一客户,一次重新设计几,品种规格多、批量小、零部件通用化程度低、供货周期长、成本高,而且质量、可靠性不稳定。因此迫切需要解决产业化前期的关键技术,对产品进行全面规划,搞好系列化、通用化、模块化设计,积极推进产业化进程。
美国的AUSS、俄罗斯的MT-88、法国的EPAVLARD等装有水下旋转机构的机器人系统己用于海洋石油开采,海底勘探、救捞作业、管道敷设和检查、电缆敷设和维护等方面,形成了有缆水下机器人和无缆水下机器人两大类。核工业用旋转机构,国外的研究主要集中在机构灵巧,动作准确可靠、反应快、重量轻、刚度好、便于装卸与维修的高性能伺服手。己完成的典型系统,如美国ORML基于机器人的放射性储罐清理系统、反应堆用双臂操作器,加拿大研制成功的辐射监测与故障诊断系统,德国的C7灵巧手等。目前,机器人技术发达的国家都在竞相开发地下旋转机构、医用旋转机构、建筑用旋转机构和军用旋转机构,并已经取得了一些卓有成效的结果。
1.3现代研究趋势
目前国际机械行业都在加大科研力度,进行旋转机构共性技术的研究,并朝着智能化和多样化方向发展。主要研究内容集中在以下儿个方面:
1)工业旋转机构的优化设计技术:探索新的高强度轻质材料,进一步提高负载/自重比,同时机构向着模块化、可重构方向发展。
2)旋转机构控制技术:重点研究开放式,模块化控制系统,人机界面更加友好,语言、图形编程界面正在研制之中。旋转机构控制器的标准化和网络化,以及从于Pc机网络式控制器己成为研究热点。编程技术除进一步提高在线编程的可操作性之外,离线编程的实用化将成为研究重点。
3)多传感器系统:为进一步提高旋转机构的智能和适应性,多种传感器的使用是其问题解决的关键。其研究热点在于有效可行的多传感器信息融合算法,特别是在非线性及非平稳、非正态分布的情形下的多传感器信息融合算法。另一个问题就是传感系统的实用化。
4)旋转机构的结构灵巧,控制系统愈来愈小,二者正朝着一体化方向发展。
5)旋转机构遥控及监控技术,半自主和自主技术,多个旋转机构和操作者之间的协调控制,通过网络建立大范围内的旋转机构遥控系统,在有时延的情况下,建立预先显示进行遥控等。
6)虚拟旋转机构技术,基于多传感器、多媒体和虚拟现实以及临场感技术,实现旋转机构的虚拟遥操作和人机交互。
7)多智能体调节控制技术:这是目前旋转机构研究的一个崭新领域。主要对多智能体的群体体系结构、相互间的通信与磋商机理,感知与学习方法,建模和规划、群体行为控制等方面进行研究。
1.4 PLC应用简介:
伴随着微电子技术,控制技术与信息技术的不断发展,可编程控制器也在不断地发展。可纺程控制器的发展趋势主要体现在在以下几个方面:
1,速度更快,体积更小
尽管可纺程控制器的体积很小,但由于微电子技术的发展,电子电路的集成度越来越高,电路析的制作及元件焊,巾技术不断改进工作,因而可纺程控制器的外菜尺寸仍在不断缩小 ,以便装入任何机器的细小空间中。目前大型可编程控制器基本逻辑指令的执行速度可高达34纳秒。速度提高就缩短了扫描周期,增加了控制的实时性,更能保证产品质量。
2、工业控制技术的集成:
现代工业要求为其生产控制与生产管理提供一种统一的解决方案,因而各大PLC厂商均摊努力提高全面解决问题的能力。为此,必须以PLC为核心作用,向下延伸到远程I/O,现场设备、步进/伺服系统等。向上扩展到人机界面、上位机、图形监控软件。近年来在这方面的发展极其迅速。有实力的厂商自身能力极强,可以为客户提供统一、完善的解决方案。
3开放性与主流计算机的结合
所谓开放性,体现在制定标准后台后各合作厂商按标准生产的设备经测试合格后均摊可直接挂上网,通信畅通无阻。
如前所述,PLC生产厂家众多。各家都有专用的MPU和机器码,要制定统一的标准,目前尚有难度 。尽管各PLC厂商都在尽力采用最新技术落后,不断推陈出新,但世界主流计算机的发展速度极为惊人。PLC有被发展潮流抛离的危险。近前推出的以PC为基础的PLC就是解决上面问题的尝试。解决方案有软件方式的也有硬件方式的。
4仿真软件开发
为了缩短安装调试工作,各大厂商推出自己模拟/虚拟PLC软件,即仿真的高度环境。虚拟的PLC可代替实际硬件PLC运行,程序运行情况的监控方式与真实硬件PLC的监控方式完全相同。
5实现远程服务以Internet/Intranet为平台,可通过电话线或无线实现便于化的远程服务,少数高水平专家可为便于用户提供技术支援及服务。
参考文献
1. 宋德玉.可编程序控制器原理及应用系统设计技术.第1版.冶金工业出版社,1999
2. 袁任光.可编程序控制器选用手册.第1版.机械工业出版社,2002
3. 孙德辉.可编程序控制器原理及应用.第1版.中国水利水电出版社,1999
4. 廖常初.PLC编程及应用.机械工业出版社,2002
5. 钟肇新.范建东.可编程序控制器原理及应用.华南理工大学出版社,2006
6. 阳宪惠.现场总线技术及其应用.清华大学出版社,1999
7. 杨卫华.现场总线网络.高等教育出版社,2004
8. 高攸纲.屏蔽与接地.北京邮电大学出版社,2004。
9. 单顺利.实时数据库系统的研制计算机科学1994年第21卷第3期
10.韩曾晋.自适应控制. 清华大学出版社,1995
11.郭小华,游志胜,李丹,曾智悦. 实时数据库在小型监控系统中的应用研究.中国民航飞行学院学报,2004年11月第15卷第6期
12.王常力,罗安.分布式控制系统(DCS)设计与应用实例 电子工业出版社 2004
13.何小阳.计算机监控原理及技术 重庆大学出版社,2003
14.组织编写.水处理工程典型设计



