





















高精度转台伺服控制系统的设计
摘 要
飞行仿真转台是一类高精度位置伺服系统,它广泛的应用于航海、航天等领域,采 用飞行仿真转台进行半实物仿真不仅加快了武器和飞行控制系统的研制过程,而且大大 减少了研制经费。随着航海、航天技术的飞速发展,对飞行仿真转台的性能和精度提出 了更高的要求。但是,以摩擦力矩为主的非线性干扰严重地影响了转台的跟踪性能,尤 其当系统低速运行时影响更为突出。因此,在控制算法上设计控制律消除摩擦影响,实 现飞行转台的高精度控制具有重要的意义。
如果针对飞行转台不仅有精确的控制方法而且还有方便准确的位置、速度测量方 法,那么该转台就可以完成一系列半实物仿真的相关试验,这样不仅降低了生产飞行仿 真转台系统的成本,而且有效地提高了飞行仿真转台的生产效率。本文主要从控制算法 和位置、速度测量方法两方面进行创新性研究。
针对飞行转台高精度控制算法进行研究,提出一些新的观点和方法。论文创新点如 下:
(1)为了消除传统 PD 控制时出现的“平顶”现象,本文在 PD 控制的基础上,利 用迭代控制从两方面进行改善:提出 PD 型迭代控制,通过迭代逐步消除了“平顶”; 从自适应补偿的角度进行考虑,采用迭代控制设计自适应律来修正 PD 控制器,从而达 到高精度控制。
(2)为了进一步提高系统的收敛速度,获得更好的跟踪性能,本文将迭代控制与 滑模控制相结合。利用滑模控制响应速度快、鲁棒性强的优点解决迭代控制的“收敛速 度”、“鲁棒性”问题,利用迭代控制逐步获得滑模控制的“滑动模态稳定性条件”。 两者相互结合,充分发挥了各自的优势。
针对位置、速度测量方法进行的研究: 微分器无需被控对象的数学模型,可以迅速准确的获取位置、速度信息,用于系统
的反馈控制中,不仅可以避免常规后项差分算法误差放大的问题,而且能够节省硬件成 本。本文在对微分器研究的基础上,采用具有全程快速收敛的混合跟踪微分器观测系统 状态,并将观测值作为控制器输入对飞行仿真转台进行控制。
关键词:飞行仿真转台;迭代学习控制;滑模变结构控制;微分器
目 录
摘 要.................................................................................................................................... I Abstract .....................................................................................................................................II
1 绪论....................................................................................................................................... 1
1.1 课题研究的背景及意义........................................................................................... 1
1.2 飞行仿真转台国内外发展概况.............................................................................. 1
1.2.1 国外研究情况................................................................................................. 2
1.2.2 国内研究情况................................................................................................. 2
1.3 飞行仿真转台的分类............................................................................................... 3
1.4 飞行仿真转台的主要性能指标.............................................................................. 5
1.5 飞行仿真转台控制策略........................................................................................... 5
1.6 论文主要工作及结构安排 ...................................................................................... 7
2 飞行仿真转台及其数学模型............................................................................................. 8
2.1 飞行仿真转台及控制系统的构成.......................................................................... 8
2.2 飞行仿真转台理想数学模型的建立...................................................................... 9
2.3 飞行仿真转台低速摩擦分析及其非线性数学模型的建立 .............................. 13
2.3.1 摩擦对系统性能的影响.............................................................................. 14
2.3.2 带摩擦的非线性数学模型.......................................................................... 15
3 迭代学习控制理论............................................................................................................ 17
3.1 迭代学习控制的基本描述 .................................................................................... 17
3.2 迭代学习控制的数学准备 .................................................................................... 18
3.3 迭代学习控制存在的问题 .................................................................................... 20
3.4 迭代控制算法与其它控制算法的关系................................................................ 21
4 飞行仿真转台迭代控制 ................................................................................................... 22
4.1 传统 PID 控制......................................................................................................... 22
4.1.1 转台伺服系统的 PD 控制策略 .................................................................. 22
4.1.2 仿真分析....................................................................................................... 23
4.2 PD 型迭代控制........................................................................................................ 24
4.2.1 转台伺服系统的 PD 型迭代控制策略...................................................... 25
4.2.2 仿真分析....................................................................................................... 25
4.3 飞行仿真转台的自适应迭代学习控制................................................................ 27
4.3.1 自适应迭代学习控制器的设计 .................................................................. 28
4.3.2 收敛性分析................................................................................................... 29
4.3.3 仿真分析....................................................................................................... 32
5 飞行仿真转台滑模迭代控制........................................................................................... 35
5.1 滑模变结构控制理论............................................................................................. 35
5.1.1 滑模变结构控制基本原理.......................................................................... 35
5.1.2 滑模变结构控制的设计步骤...................................................................... 36
5.1.3 滑模变结构控制的抖振问题...................................................................... 38
5.2 滑模控制器的设计................................................................................................. 39
5.2.1 系统描述....................................................................................................... 39
5.2.2 控制器设计................................................................................................... 40
5.2.3 仿真分析....................................................................................................... 41
5.3 滑模迭代学习控制器的设计 ................................................................................ 42
5.3.1 控制器设计................................................................................................... 43
5.3.2 收敛性分析................................................................................................... 44
5.3.3 仿真分析....................................................................................................... 49
6 转台基于微分器的研究 ................................................................................................... 52
6.1 微分器介绍 .............................................................................................................. 52
6.1.1 微分器的由来............................................................................................... 52
6.1.2 经典微分器................................................................................................... 54
6.2 混合跟踪微分器..................................................................................................... 55
6.2.1 线性微分器设计 .......................................................................................... 55
6.2.2 非线性微分器设计 ...................................................................................... 55
6.2.3 混合微分器设计 .......................................................................................... 56
6.2.4 混合微分器收敛性证明.............................................................................. 57
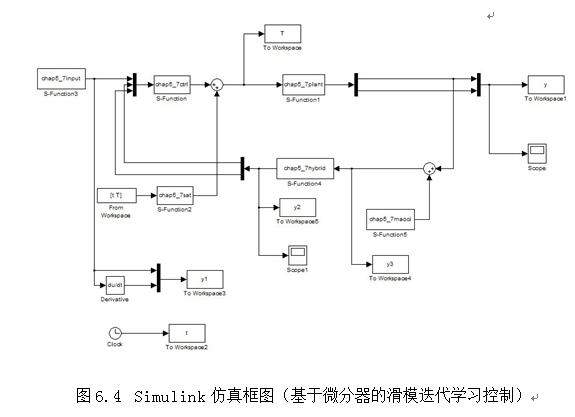
6.3 基于混合微分器的滑模迭代学习控制................................................................ 59 结 论................................................................................................................................. 64 参考文献 ................................................................................................................................ 65 在学研究成果........................................................................................................................ 68 致 谢................................................................................................................................. 69
参考文献
[1] 解磊.基于变结构控制策略的转台控制技术研究[D].南京:南京航空航天大学,
2006,2.
[2] 盛守照.前向神经网络学习问题研究及其在转台控制中的应用[D].南京:南京航 空航天大学,2005,3.
[3] 胡细娟.飞行器三轴仿真转台动力学分析与实验研究[D].武汉:武汉工程大学,
2012,5.
[4] 刘文佳.基于PMAC的三轴仿真转台系统研究[D].哈尔滨:哈尔滨工程大学,
2008,1.
[5] 刘志聪.基于DSP惯导测试伺服系统的研究[D].西安:西北工业大学,2006,3.
[6] 陈运广.液压三轴仿真转台低速性能分析及其控制的研究[D].哈尔滨:哈尔滨工 业大学,2008,6.
[7] 王雪峰.飞行仿真转台品质整定与先进控制方法研究[D].南京:南京航空航天大 学,2004,2.
[8] 崔海涛.三轴转台伺服系统模糊滑模控制研究[D].哈尔滨:哈尔滨工业大学,
2010,7.
[9] 高亮.基于干扰观测器的转台控制系统设计[D] .哈尔滨:哈尔滨工业大学,
2007,7.
[10] 贺小蓉.飞行仿真转台现代控制技术研究[D].南京:南京航空航天大学,2002,
3.
[11] 付兴武,苏东海,赵克定,刘庆和.三轴飞行姿态仿真转台高性能指标及其实现[J].
中国惯性技术学报.1998,6(2):62-66.
[12] 刘金琨.滑模变结构控制MATLAB仿真(第2版)[M].北京:清华大学出版社,
2012.
[13] LIN F J, WAI R J. Sliding-mode-controlled slider-crank mechanism with fuzzy neural network [J]. IEEE Trans on Industrial Electronics, 2001, 48(1): 60-70.
[14] J. X. Xu, T. H. Lee, Y. J. Pan. On the sliding mode control for DC servo mechanisms in the presence of unmodeled dynamics [J]. Mechatronics, 2003, 13(7): 755-770.
[15] 刘一江,李轶.基于迭代学习控制的电液伺服振动台研究[J]. 计算机仿真,2008,
25(2):319-321.
[16] 田森平,毛琳琳.带控制时滞广义系统的PID 型迭代学习算法[J]. 控制工程,
2012,19(1):65-68.
[17] Arimoto S, Kawamura S, Miyazaki F. Bettering operation of robotics by learning [J]. J of
Robotics Systems, 1984, 1(2): 123-140.
[18] 殷辰堃.基于高阶内模的迭代学习控制及应用[D]. 北京:北京交通大学,2011. [19] 刘媛.基于神经网络的伺服控制问题研究[D].北京:北京航空航天大学,2005. [20] 刘强,扈宏杰,刘金琨,等.高精度飞行仿真转台的鲁棒自适应控制[J]. 系统工程
与电子技术,2001,23(10):35-38.
[21] 胡祐德,曾乐生,马东升.伺服系统原理与设计[M] .北京:北京理工大学出版 社,1993.
[22] Jun-Keun Ji, Seung-Ki Sul. Kalman Filter and LQ based Speed Controller for Torsional
Vibration Suppression [J]. Transaction on Industrial Electronics, 1995, 42(6): 565-571.
[23] 柳俊成.飞行仿真转台低速性能分析与研究[D] .南京:南京航空航天大学,
2004.
[24] 刘强,尔联洁,刘金琨.摩擦非线性环节的特性、建模与控制补偿综述[J]. 系统工 程与电子技术,2002,24(11):45-51.
[25] Canudas De Wit C. Robust Control for Servo-Mechanisms under Inexact Friction
Compensation [J]. Automatica, 1993, 29(30): 757-761.
[26] Uchiyama M. Formation of high speed motion pattern of mechanical arm by trial.
Transaction of the Society of Instrument and Control Engineerings, 1978, 14: 706-712.
[27] Arimoto S, Kawamura S, Miyazaki F. Bettering operation of robots by learning. Journal of
Robot System, 1984, 1: 123-140.
[28] 王友清,周东华,高福荣.迭代学习控制的二维模型理论及应用[M].北京:科学 出版社,2013.
[29] Xu J X, Tan Y. Robust Optimal Design and Convergence Properties Analysis of Itertive
Learning Control Approaches [J]. Automatica, 2002,38(11) : 1867-1880.
[30] Jia L, Rong-Hu C, Lin Z. Adaptive Iterative Learning Control with Dead Zone Scheme [C]
//Control Conference (CCC), 2011 30th Chinese. USA: IEEE, 2011: 2462-2465.
[31] 张凯院,徐仲.矩阵论[M].北京:科学出版社,2013.
[32] 时宝,王兴平,盖明久,张德寸.泛函分析引论及其应用[M].北京:国防工业出 版社,2006.
[33] 于少娟.迭代学习控制理论及应用[M].北京:机械工业出版社,2005.
[34] Choi J Y, Lee J S. Adaptive iterative learning control of robot manipulators[J]. Control
Theory and Applications, 2000,147(2) : 217-223.
[35] S. Hillenbrand, M. Pandit. An iterative learning controller with reduced sampling rate for plants with variations of initial states [J]. Int. J. Control, 2000,73(10) : 882-889.
[36] K H. Park, Z. Bien. A generalized iterative learning controller against initial state error[J].
Int. J. Control, 2000,73(10) : 871-881.
[37] Xu J X. Adaptive robust iterative learning control with dead zone scheme[J]. Automatica,
2000,36(1) : 91-99.
[38] 朱齐丹,汪瞳.低速飞行模拟转台变结构控制设计[J]. 控制工程,2010,17(1):
31-34.
[39] 张鹏,欧阳红林.基于滑模迭代学习的永磁同步电动机鲁棒控制[J]. 计算机仿真,
2011,28(10):156-159.
[40] 赵婧.基于模糊滑模控制的迭代学习控制算法研究[D].兰州:兰州理工大学,
2012.
[41] 刘柏廷, 吴云洁, 黄廷福. 基于模糊干扰观测器的自适应反演滑模控制研究[J]. 系统 仿真学报, 2011,23(8) : 1677-1680.
[42] 贾东明.基于迭代滑模算法的机械臂控制[D].郑州:郑州大学,2011.
[43] 马珍珍.永磁同步直线电机迭代学习控制的研究[D] .浙江:浙江工业大学,
2006.
[44] 秦贞华.工业机器人轨迹跟踪控制研究[D].浙江:浙江工业大学,2012.
[45] 李殿璞.非线性控制系统[M].西安:西北工业大学出版社,2009.
[46] S. C. Y Chung, C. L. Lin. A transformed lure problem for sliding mode control and chattering reduction [J]. IEEE Transactions on Automatic Control, 1999, 44 (3) : 563-568.
[47] Kuo T C, Huang Y J, Chang S H. Sliding mode control with self-tuning law for uncertain nonlinear systems [J]. ISA Transactions, 2008, 47(2) : 171-178.
[48] 申宇.滑模变结构控制中抖振的特性研究与抑制[D].西安:西安电子科技大学,
2012.
[49] 崔志强, 刘吉臻, 刘金琨. 基于微分器的燃料—汽压系统直接神经网络控制[J]. 动力 工程学报, 2012, 32(6): 445-493.
[50] 王新华, 刘金琨. 微分器设计与应用[M]. 北京:电子工业出版社, 2010.
[51] 韩京清, 王伟. 非线性跟踪-微分器[J]. 系统科学与数学, 1994, 14(2): 177-183.
[52] A.N.Atassi, H.K.Khalil. Separation results for the stabilization of nonlinear systems using different high-gain observer designs [J]. Systems and Control Letters, 2000, 39: 183-191.
[53] A.Levant. Robust exact differentiation via sliding mode technique[J]. Automatica, 1998,34 :
379-384.
http://www.bysj1.com/
http://www.bysj1.com/html/4408.html http://www.bysj1.com/html/4416.html http://www.bysj1.com/html/4406.html http://www.bysj1.com/html/4398.html



