





















仿真机器手掌设计
摘要: 本论文设计的仿真手控制系统采用有关PLC的软件实现自动控制,通过Centurystar仿真组态监控软件形成可视图像。机器人可以区分三种类型的货物,同时也能够相应地存储它们并具有灵活的移动功能。经过软件硬件的组合和调整测试,成功完成了PLC仿真手的控制,做到了工业设计目标,完成了工业设计的自动化。
关键词:可编程控制器;世纪星组态软件;机械手;自动控制
Simulation Machine Palm Design
Abstract : The robot control system designed in this paper adopts PLC application software to realize automatic control and form visual images through Centurystar simulation configuration monitoring software. The robot can distinguish three types of goods, and at the same time can store them accordingly and have a flexible movement function. After the combination of software and hardware and debugging, the control of the PLC manipulator is realized, the industrial design goal is achieved, and the automation of the industrial design is realized.
Keywords: Programmable Controller; Century-configuration software; robot; Automatic Control
目 录
1 绪论 3
1.1仿生机器手掌的概述 4
1.2 仿生手的发展趋势 4
1.3 国内研究现状 5
1.4 设计思路 6
2 仿真手操作系统的设计方案和资源分配 8
2.1 机械手的结构和工作原理 8
2.1.1 执行机构 8
2.1.2操作系统 9
2.1.3遥控系统 9
2.1.4 位置检测装置 9
2.2仿真手工作过程 9
2.3 机械手控制系统的资源配置 12
3 机械手控制系统的软件调试 15
3.1 编程软件 15
3.2 I/O 地址分配 16
3.2.1 输入部分 16
3.2.2 输出部分 16
3.3 系统程序的具体分析 17
3.3.1 仿真手遥控过程中的命令简介 17
3.3.2 源程序分析 18
4 实时监控系统的设计与调试 20
4.1 组态软件的选择及概述 20
4.2 监控画面的设计 21
4.2.1 世纪星与PLC的连接 21
4.2.2 串行通信协议 22
4.2.3 变量的定义 23
4.2.4 应用程序命令语言 23
4.2.5 可视画面 25
结 论 28
致 谢 29
参考文献 31
附 录1逻辑电路图 32
附录2原理图 34
附录3 电路板图 39
1 绪论
现代化生产早就已经开始使用机器人工作了。它可以有效的替代人的劳动力,可以大幅度提升工作效率,所以机器人在各个领域都已经开始投入使用。
机器人种类很多。最简单的例如塔式起重机,它可以取代工人去做一些稍微复杂的工作,例如冲压、搬运、装载和卸载各种搬运站上的材料;可以取代手动喷漆的机器人;机器人处理货物和装卸货柜;在相对紧凑的空间,工人没办法正常工作的地方可以使用机器人;可以生产小物件的简单机器人等。这些机器人都可以灵活地移动物体或重复一种动作。这些机器人当中很多都是使用的传统的继电器。这种机器人的布线复杂,需要很多时间去维修保护。而且使用继电器控制的机器人不够灵动,低抗干扰的能力也很弱工作起来没有想象中的那么好。
PLC是把接触器和继电器的长处以及CPU的灵活性联合了起来,大大的体现出了方便性、制造成本低等优点,使得PLC和其他控制器相比优点非常的突出,这是其他方式没有办法相比较的,比如它的通用性强,易于使用;版块模式的构造,演变出了多种系统方式的组合;编程的技能比较简单容易学会,而且系统设计周期短,生产当中的改变与不同也比较容易适应,装起来非常简单,试起来也特别容易,就是维修防护的工作量比较大。
本文设计的操纵器吸取了过去的经验教训。除了以前操纵器的灵活性和运输货物的能力外,它们还可以区分货物的尺寸并将其放置在适当的箱子中。这似乎使机器人有了自己的想法,或者说有了大脑,能够充分体现自动控制,并根据时代的发展而进步。PLC控制器可以在0到60度,相对湿度90%的温度范围内运转,在电网电压不稳定,频率的不同,机械振动,电磁扰乱等非常让人难以接受的环境中可以正常工作。
在设计中,机器人需要计时来拾取和释放货物,由于梯形图主要由逻辑顺序控制编程,它是基于内部继电器的连接方式,以及一些系统的指令,如计数继电器CNT,保持器KEEP等来完成自动操作的目的。控制计划从硬件,软件和时刻监控系统开始。根据设计的步骤,选择对应的硬件。控制程序是由软件来编写的,经过硬件与软件的协调与测试,完成工业上的设计要求和自动化的实现。
1.1仿生机器手掌的概述
仿生手掌是模仿人的手掌的部分能力,根据一系列的流程,系统与操作方法去实现自动伸展弯曲的自动装置。在车间作业的时候这种使用的方法可以称为工业机械手。在工作中大量的使用,仿真手掌可以大大加强生产的时间,并且可以大大减少工人的劳动强度,也可以大批量的节约工人的成本。另外还有一个主要的缘故便是可以在非常强的的光线,非常高的温度,或者有毒有害的气体情况下,它可以代替工人去干活,把人们从危机生命安全的干活环境中解放出来。随着各行各业的进步,性能和功能逐渐的提高,在重工业加工方面,汽车组装,汽车喷漆,机器装运等方面越来越受到人们的喜爱。
1.2 仿生手的发展趋势
(1) 重复高精度
所谓精度是指仿真手在给定点的精确度下可以顺利的完成任务,这就需要硬件驱动程序和反馈设备的准确率有关。一个动作反复多次的操作,机器人到相同位置的准确程度就是重复精度。重复精度比精度更重要。如果仿真手的位置不是多么的准确,那么一般会显示一个一样的错误。这个错误是可以预见的,可以通过编程来纠正。重复精度定义了通过重复运行机器人一定次数确定的一系列随机错误。伴随着微电子行业和现代控制行业的进步,操纵器的可重复性将会变得很高,其适用范围将更加广泛,如核能和军工。
(2) 模式化
一些公司称机器人具有一系列作为简单传输技术的导向驱动器,以及作为现代传输技术的模块化装配机器人。模式化装配机器人具有比组合式导向驱动的安装系统更灵敏。它将电气接口和导向系统与电缆和管道结合在一起,使机器人可以自由移动。模式化仿生机器手掌使得同一个仿生机器手掌可以使用不一样的模式,拥有多个功能,从而增加了仿生机器手掌的使用空间,是仿生机器手掌的一个重点发展的技术。
(3) 节能化
为了顺应食物、药物、等多种工业的无污染要求,不用润滑的元件被研发了出来。跟着先进材料的呈现和技术的提高,使用自润滑材质生产的这种元件,不但节约润滑油、不恶化环境,而且体系简略、磨擦机能不变、耗资低、使用时间长。
(4) 机电一体化
由“可编程控制器 - 传感器 - 液压组件”组成的示例性控制系统仍然是自动化的重要方面。自适应液压元件与电子技术相结合的发展使液压技术从开关节制转向了高位反馈控制;但减少了接线,管道和部件,而且拆卸简单,大大提高了系统的使用性。
1.3 国内研究现状
随着机器人智能水平的提高以及工业机器人向更深更广方向的发展,工业机器人机械手的使用范畴正在不断地增加,最近几年,各地区生产企业采用“机器换人”速度增加,更加显现出传统技艺被“替换”危机性。发展以来,工业机器人仿真手已从汽车生产业发展到其他生产业,从而发展到比如采矿机器人、建筑业机器人以及水电系统维护维修机器人等各种非生产行业。工业机器人可以取替人工进行诸多环节的任务。
中国即是最需要又是最不需要机器人的国家,中国人口茂密,但最近几年来,人口优势正在不断消失,因此我国要做世界强国就必需使用最少的资源做更多的事,企业必需想尽一切办法的使用高新科技来提高生产效率,以高竞争力获胜,这就需要使用产业机器人机械手,不可否认人是没有机器人那样的精确率,准确率和高效率的,而且考虑到长期的利益发展,选择工业机器人远比人工线更加便宜。这样可能会导致有人失业,但会创造更多的就业机会,社会也会从中获利。我相信在未来的一天,工业机器人机械手产业会像汽车一样成为国家的经济支柱产业。
中国机器人制造业的起步不算早,从80年代“七五”科技攻关起步,在国家的支撑下,通过“七五”、“八五”科技攻关,此前已经差不多掌控了机器人操作机的设计生产技术、掌控系统硬件和软件设计技术、运动学和轨迹规划能力,产生了部分机器人关键元器件,生产出喷漆、弧焊、点焊、装置、搬运等机器人。由于全球第一大需求市场的要求,国内机器人产业的生产速度还是相当相当惊人的。
通过四十多年的成长,境内工业机器人已在越来越多的地区使用。在生产业中,特别是在汽车生产中,工业机械手机器人得到了越来越多的使用。比如在坯料制造(冲压、压 铸、锻造等)、机器加工、焊接、热处理、表面涂料、上下料、装置、检验及仓库堆垛等过程中,机器人都已逐步代替了人工作业。
本国的机器人产业化必需由市场来带动,机器人作为高科技,它的成长与社会的生产、财政状况紧密相连。中国工业机器人必需从产业发源处开始,把目光放得更远,把标杆放得更高,更加重视高端科技、核心科技、核心零部件等各方面。工业机器人机械手的研发与制造、开发必需从技术上实现可能性大为原则来挑选机器人优先适用的领域,并以此为突破点,向其他领域发展、散播极为重要。
1.4 设计思路
(1)PLC系统
根据各种各样的结构模式,PLC可以分为一体式和版块式,一体式比版块式更实惠。该控制系统使用整体式PLC。整体PLC系统由外围接口,扩展端口,输入输出单位,CPU,电源和储存器组成。本设计选用的欧姆龙PLC,在它的高速程序控制器里面包含供电装置,CPU和I/O组件,具有很多的发布命令的作用,方便使用者编写程序,有很多的特别的模块和联络功能,可以应用于很多种自动化生产的需求。由于机器控制对功能和处理速度要求的比较高,因此我们使用CPM2A,它的功能比较全面,可容纳的程序比较多,储存单元小的PLC。另外CPU元件有 RS-232C接口,可与PPI,MPI等完成传输程序,数据通讯等功能。
(2)I/O单元
设计中的输入电路是用于检测,采集,转换和输入的受控对象。在这里,开启和关闭的启动按钮用于通过中控台上装好的电钮和限位开关向PLC发送操作命令。因此,这个部分是一个开关量输入。输出回路由接触器,电磁阀,线圈等组成,主要功能是接收PLC释放的操作命令,并对将要控制的东西进行控制任务。
(3)PLC外围设备
PLC中有许多外层设备,但最基础的功能无非是处理信息和数据。使用配置软件来设计实时监控系统。
(4)PLC硬件系统配置
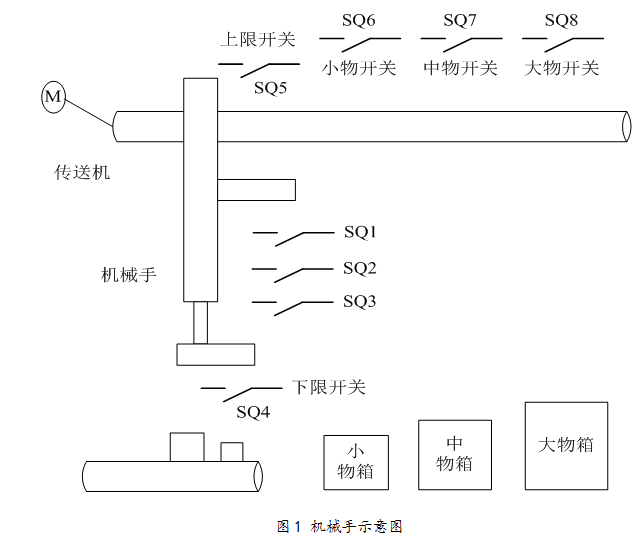
限位开关SQ0-SQ8都可以用于机器人命令发布。输出设备有一个机器人手掌和手臂。通过控制几个限位开关,手臂和手掌可以根据具体的需要而去执行任务。
该操作的完成需要9个输入位置和5个输出位置的配合,以及PLC的帮助,如内部辅助继电器通道。我们的输出位置使用了继电器作为输出,电压应该为AC220V。输出点被分组,每一组使用与该组相对应的电源,不一样的组用不一样的电源。这样有利于操作。
低成本、机能突出的CPM2A系列PLC都具有控制同步脉冲的能力,调节输入输出的脉冲频率比会特别容易,具有9个反应快速的输入点。它可以很容易的与欧姆龙的可编程最终控制端(PT)连接,可以看到操作机器的界面。该公司生产的PLC存储器的类型是RAM类型。安装方法包括直接插入集成块,内存板和IC卡这里使用集成的块安装方法。它们最重要的作用是把用户的程序和工作中的数据,系统的程序存储起来。
欧姆龙CPM2A PLC供应一个RS-232通讯端口,经过COM1和COM2连接到计算机。而在主控的模块一般是配备一块锂电池,主要用来节省使用者的程序和关机数据。LED指示灯安装在CPM2A PLC的表面,用于指示PLC电源(POWER),RUN,PROG,ERROR,ALARM,COM等。随着PLC应用程度的提高和不断的加大规模,PLC的使用软件变得非常的多。
PLC系统软件和工作过程:在系统软件的使用中,PLC逐一解释并执行用户程序,直到用户程序结束,然后退回到程序进行新的扫描。由于使用了循环扫描操作模式,因此只扫描“线圈”的触点,触点不移动。用户程序的PLC扫描时间是用户程序的长度和扫描速度比例,是扫描周期通常为1毫秒到几十毫秒。
Omron CPM2A型PLC使用梯形图编程语言。这种程序可以说是非常简单,很好学会,并且可以清楚的看到程序执行的结果。与诸如C语言和汇编语言之类的计算机语言相比,梯形图更合乎逻辑,它们用不变的指令代替图形,使其更易于记忆。这些指令也更简单明了,不会有太多电脑的理念和构造。因此,即使对电脑的理念和构造不是多么的熟悉,掌握梯形图语言也不会有太大的困难。这也对机器人的操作简单和使用的普及提供了便捷。
机器人在操作中的主要使命可以分为两个步骤。第一个步骤是分辨抓取对象,当启动开关打开时,机器人手臂可以向下降落。下行过程中有三个位置开关。根据不一样的深度,即物品的高度,控制按钮的数量也不同,以便根据压力开关电钮的状态可以分辨尺寸不一样的货物。第二部分是货物的存储,区分货物然后向右移动。这个工作的进行中仍然有三个位置电钮。根据商品的类型,按下相应的开关后,它就会向下存放在相应的盒子里。
根据上面的描述,系统的控制应该从三个方面开始设计:PLC硬件,软件和实时监控系统。根据机器人的行为方式和特征,选择PLC硬件,并使用相对应的软件去做程序的设计。同时使用组态软件使屏幕可见,尽可能的完成被控制的东西和用户的操作要求,并达到操作要求。在此前提下,我们努力使操作方式变得简单,并确保它的可靠性和灵活性。
参考文献
[1] 陈在平, 赵相宾.可编程控制器技术与应用系统设计 .机械工业出版社 :290-318
[2] 陈金华 .可编程序控制器应用技术.北京.电子工业出版社,1993:89-90
[3] 钟肇新,彭侃 .可编程控制器原理及应用.第二版 .华南理大学出版社,2003.5:158-165
[4] 常晓玲.电气控制系统与可编程控制器. 北京. 机械工业出版社 ,2004 :289-291
[5] 钟肇新,范建东 .可编程控制器原理及应用 .第三版 .华南理大学出版社,2003.5:259-268
[6] 王成福 .可编程控制器及其应用 .机械工业出版社:116-125
[7] 祁文钊,霍罡. CS/CJ系列PLC应用基础及案例 .机械工业出版社:256-273
[8] 宋伯生 .PLC编程理论算法及技巧 .机械工业出版社:305-335
[9] 谢克明,夏路易.可编程控制器原理与程序设计.北京电子出版社,2002:255-2765
[10] 世纪星使用手册:8-25



