





















ABB工业机器人的虚拟示教与编程
摘要:二十一世纪是一个经济、技术都在快速发展的时代,工业机器人已经成为如今生产线上一个重要的,不可或缺的组成部分,相比于人类方面的在生产制造方面的限制,它可以很准确无误地完成各式各样操作和任务。机器人的智能化发展势必会是一个大的趋势。
本篇论文就是通过在Robot studio软件中通过程序的写入,来实现机器人在搬运与码垛过程中的的虚拟示教过程。首先是手动示教,就是说操作的人使用示教器,来控制住机器人的关节,让机器人到达某一预定的位置,这时也需要将该位置记录下来,再传输到机器人的控制器之中去,最后机器人就可以根据之前输入的指令进行示教了。本文就是以此过程和编程为主。
ABB工业机器人是全球领先的机器人产品,极大的提高了生产的效率,提升了安全水平,并且改善了整个产品的质量。所以说,本文就采用了ABB工业机器人。
关键词:ABB机器人 机器人虚拟示教 智能化
Virtual teaching and programming of ABB industrial robot
Abstract: The 21st century is an economic and technology in the era of rapid development, industrial robot has become now the production line is an important, indispensable constituent, compared to the human aspects of the manufacturing constraints, it can be very accurate for a variety of operations and tasks. The intelligent development of robot is bound to be a big trend.
This paper is to realize the virtual teaching process of the Robot in the process of handling and stacking by writing the program in Robot studio software. First is manual teaching, that is, using operation of teaching, to control the robot joints, allow robots to reach a predetermined position, at this time also need to record the location, and then transfer to the controller of the robot, the robot can be taught according to the instructions of the input before. This article is based on this process and programming.
ABB industrial robot is the world's leading robot product, which greatly improves the production efficiency, improves the safety level, and improves the quality of the whole product. Therefore, this paper adopts ABB industrial robot.
Keywords: ABB?industrial?robot; Virtual?teaching?of?robots; intelligent
第一章 引言
1.1课题的来源和研究意义
随着科技的发展,现在的社会越来越趋向于生产自动化,智能制造,数字化控制、流水线的生产模式。工业机器人也开始逐渐在方方面面应用起来。一方面,工业机器人可以在温度高,气压高,或者低气压,低气温,粉尘等恶劣的环境下作业;另一方面,机器人可以高强度,高效率,高质量的完成生产线上的工作,很大程度上解决了作业安全以及人力各方面的问题。机器人作为无锡职业技术学院控制系机器人研究所主推的大赛建设项目,不仅仅是因为我校在机器人方面的掌握了解程度,更是因为现在机器人是典型的机电一体化产品并且在工业生产中起着尤为关键的作用,目前,自动化生产领域越来越青睐于运用机器人来实现物料的搬运等各方面的操作。随着德国提出的“以智能工厂、制造为主”为主导的第四次工业革命已经到来。众所周知,工业机器人在生产制造,工业设计,智能搬运等方面起着举足轻重的作用。是实现生产自动化,车间智能制造,数字化工厂,智能工厂的重要基础装备。而全球的机器人主要在日本和欧洲产出,瑞士的ABB公司是世界上最大的机器人制造公司之一。
因此,研究ABB机器人有助于我们在焊接、装配铸造、喷漆、搬运、包装等方面的应用。
1.2国内外ABB工业机器人研究和发展
在亚洲,一些日、韩企业在生产自动化领域起步较早,而在中国大陆地区,近些年来才开始注重生产的自动化,以及工厂的智能化,但还没有一条稳固的生产线;
然而之所以大陆地区不重视自动化这方面的发展,一方面是因为几十年来的固态思维,固定的人力生产模式,过去的几十年由于资金的匮乏以及技术的缺失,导致了生产模式的止步不前,唯一的优势就是流水生产线上的廉价劳动力繁多。另一方面是因为企业管理者的思维固化,认为利用高价格的机器人与廉价的劳动力相比,机器人的投入更加的大,风险比较高。企业管理者没有综合的来考虑自动化生产的优势与劣势。
因此在工业领域中,我们所知道的是,机器人是机电一体化的典型代表,可以代替我们进行在各种危险,恶劣的环境中进行作业,而且在机械加工,锻造,铸造,热加工等方面有着广泛的应用,已有越来越多的企业倾向于工业生产自动化,越来越倾向于将机器人投入一线生产。
我国现在拥有机器人4000多台,主要在投放在工业发达的地区。而全世界一共拥有83万台机器人,美国,日本占大多数。由此可见我国在研究机器人的方面与发达国家还有一段很大的差距。
在西方发达国家,很多企业为了员工的人生安全,也为了降低自己的生产投入成本,提高生产效率早已经开始实施机器人自动化生产。
1954年,美国人戴尔沃一开始就提出了工业机器人的概念,并且申请了专利,这个专利的主要特点就是利用伺服机器人的关节,通过人手对机器人进行动作示教,然后机器人在实现动作的记录和再现,即示教再现型机器人,现在的机器人一般都运用这种控制模式。
1962年,美国AMF公司推出的“VERS-TRAN”和UNIMATION公司推出的“UNIMATE”是机器人产品最早的实用型机型,控制方式和数控机床差不多,但是外形有很大的区别,机器人类似人的手和臂组成。
1965年,身处MIT的罗伯茨展现了第一个具有视觉传感系统,简单识别定位的机器人系统[1]。
现在我们所知道的机器人大致如下:搬运机器人,码垛机器人,焊接机器人,喷漆机器人等等。
搬运机器人结构简单,易于操控,越来越多的国内外生产企业都将他归为生产线上不可或缺的机器人,工业机器人简单的表示就是一个用来抓取的机械手臂。因此工业机器人最重要的地方就是他简单灵活的机械抓手以及他对工件灵敏的抓取以及放置。根据报告显示越来越多的电商正在进行一个机器人的仓储智能搬运[3],这样不仅降低了用户的投入成本,还能创建一个非常适合自己的仓储搬运一套化管理,为自己量身定制一套物流管理方案以及创建一个新的物流管理系统,有利于企业本身的一个长远的发展[3]。
1.3本文的主要研究内容
当代社会,在机电一体化和智能化生产的社会大潮流之下,更多的生产企业也越来越发重视机器人在一线生产中的应用,以此来实现我们的数字化的操控以及管理,也有越来越多的企业开始采用机器人来作为生产一线的劳动力从而实现材料的一个搬运以及材料物资的入库处理,搬运机器人主要的关键部位是在于它的机械抓手的抓取的灵活程度以及准确的抓取和放置的位置,所以本文我们主要研究的是ABB IRB2600机器人的搬运以及码垛的编程和机器人的虚拟示教 。
目录
第一章 引言 3
1.1课题的来源和研究意义 3
1.2国内外ABB工业机器人研究和发展 3
1.3本文的主要研究内容 4
第二章 虚拟示教编程的准备工作 6
2.1ABB工业机器人的简介 6
2.2熟悉ABB机器人种类型号 6
2.2.1IRB2600机器人的简单剖析 9
2.3 ROBOT STUDIO的安装与下载 9
2.4工业机器人的基础操作 11
2.4.1了解机器人示教器 11
2.4.2查看机器人常用信息和日志 14
2.4.3机器人备份数据与恢复数据 14
2.4.4手动操作 14
第三章 机器人的通讯 16
3.1 I/O信号和I/O板 16
3.2 I/0通信接口的标准 16
3.2.1 ABB机器人的标准I/O板 16
3.2.2配置信号 17
3.2.3 I/O信号的监控与操作 17
3.3系统的输入/输出与I/O信号的联系 17
3.4定义可编程序按键 17
第四章 机器人的示教与编程及调试 18
4.1建立机器人的程序数据 18
4.1.1程序数据的内容 18
4.1.2程序数据的类型与分类 18
4.1.3如何创建程序数据 19
4.2 建立RAPID程序 19
第五章 机器人的程序的编辑以及调试 21
5.1机器人的搬运以及码垛 21
5.1.1机器人的搬运 21
5.1.2机器人的码垛 21
5.2示教系统的实现 22
5.2.1设计示教场景 22
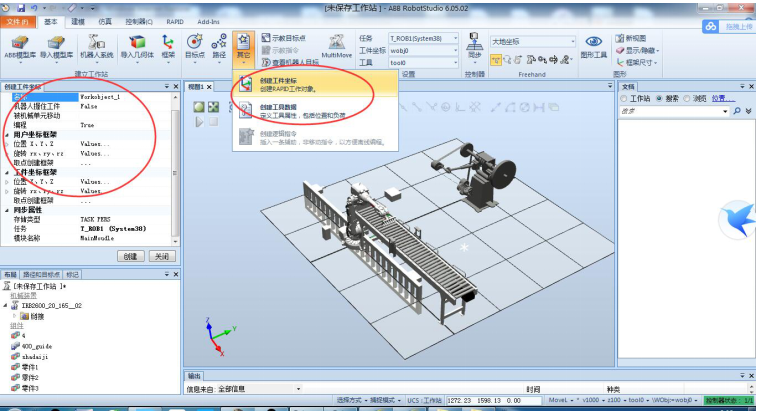
5.2.2工作站的建立 23
5.2.3设定工件坐标 23
第六章 总结 25
致谢 27
参考文献 29
附录 30参考文献
[1] 魏志丽,林燕文.工业机器人应用基础—基于ABB机器人[M].北京航天航空大学出版社,2016,7.
[2] 潘俊浩,卓勇,侯亮,卜建祥.面向ABB IRB4600机器人的虚拟示教系统研究[J].机电工程.2017.12.1001-4551.
[3] 郭洪红.工业机器人技术[M].西安电子科技大学出版社.2012.3.
[4] 张超,张继媛. ABB工业机器人[M].北京:机械工业出版社,2016.5.
[5] 王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报.2014.0577-6686.
[6] 王娟娟.移动机器人路径规划方法研究[D].山东理工大学.2010.



