




基于stc89c52单片机家庭扫地机器人设计
摘要:随着自动化技术的发展,家用电器的需求量也在增加,为智能家居发展创造了优良的条件,扫地机器人又称为自动打扫机,凭借一定人工智能,可以自动清扫房间、擦拭地板,同时还具备自动充电、防撞等诸多功能。近几年来,基于家庭机器人的发展前景广阔,很多国家尤其是一些发达国家普遍展开了对它的研究和实践应用。本次研究主要目的在于设计出一个扫地机器人,并对设计中应用的软硬件、技术等进行系统论述,根据设计方案,该机器人包含电压检测、稳压以及MCU主控电路等,要求机器人充电后能够按照要求对一定区域进行清洁,同时当电量耗尽无法工作时,能够自行寻找插座充电。在市场中具极大地发展空间。
关键字:家庭扫地机器人;避障;stc89c52单片机
The design of sweeping robot
Abstract:With the continuous development of automation technology, the demand for household electrical appliances has been increasing, creating excellent conditions for the development of smart home.Floor sweeping robot is also called automatic cleaning machine. With certain artificial intelligence, it can automatically clean the room, wipe the floor, and also have many functions, such as automatic charging, collision prevention and so on.In recent years, family robots have broad prospects for development, and many countries, especially some developed countries, have generally studied and applied them.The main purpose of this study is to design a floor sweeping robot. The software, hardware and technology used in the design are discussed systematically. According to the design scheme, the robot includes voltage detection, voltage stabilizer and MCU. The main control circuit requires the robot to clean a certain area according to the requirements after charging, and can find the socket to charge when the electricity is exhausted and can not work.There is great room for development in the market.
Keywords:Sweeping robot,obstacle avoidance, STC89C52
目录
一、绪论 4
1.1 课题设计背景和要求 4
1.2 国内机器人产品的研究背景 4
1.3 国外机器人产品的研究背景 5
1.4 研究的目的和意义 7
1.5 论文的主要内容 7
二、整体方案设计 7
2.1 电源芯片选型 7
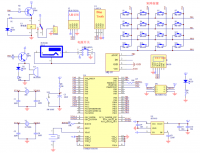
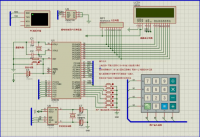
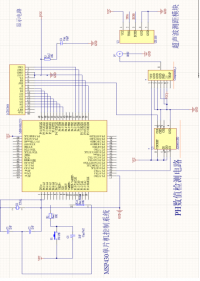
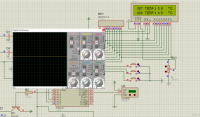
2.2 STC89C52单片机电路设计 8
2.2.1相关特性 9
2.2.2.参数 9
2.2.3.引脚介绍 9
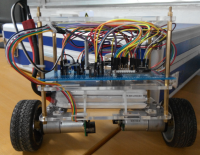
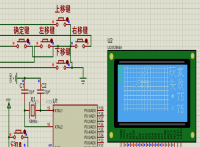
2.3 扫地机器人的功能 10
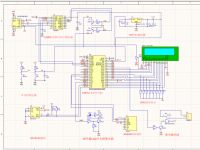
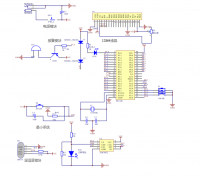
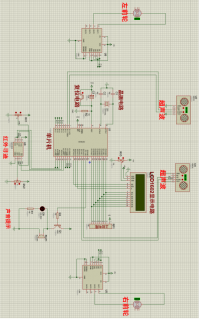
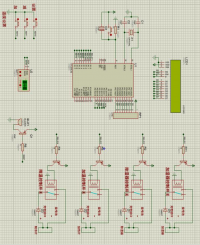
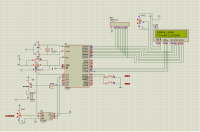
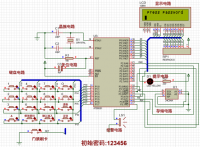
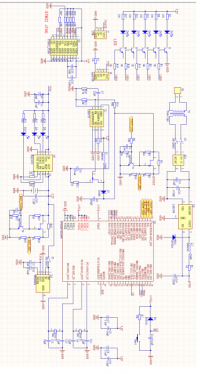
三、硬件电路的设计 10
3.1 电源电路 10
3.2 防撞落电路 11
3.3 防跌落电路 12
3.4 电源电压检测电路 13
3.5 电池充电电路 14
3.6 电机驱动电路的设计和选择 15
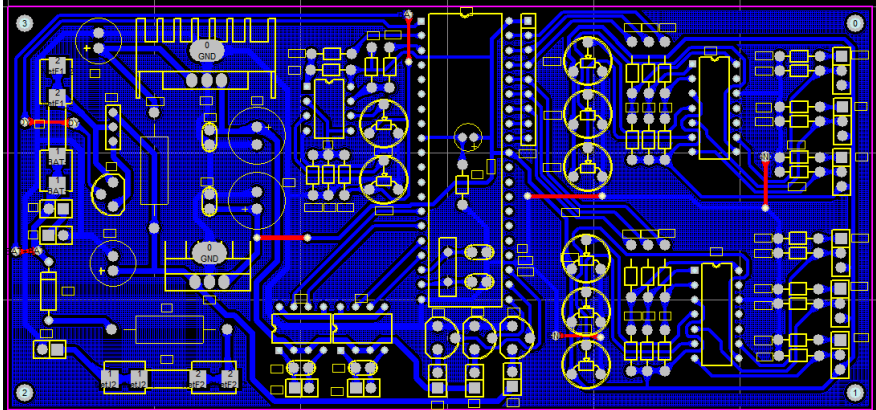
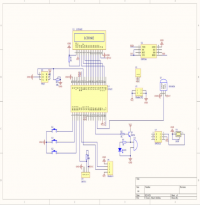
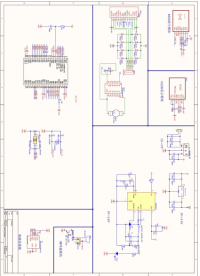
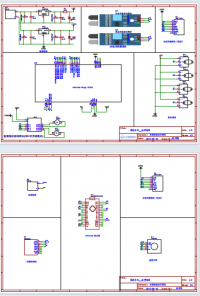
四、PCB板的设计与制作 16
4.1 PCB板的设计 16
4.2 PCB板的制作 18
五、系统程序的设计 20
5.1程序的初始化 21
5.2主程序的设计 21
5.3防撞程序的设计 23
5.4 防跌落程序的设计 24
5.5 充电寻迹程序的设计 24
六、 发展趋势和展望 26
七、总结与致谢 27
参考文献 28
一、绪论
1.1课题设计背景和要求
这几年来,中国的工业和社会现状的发展尤为迅速,加上人口老龄化的制度,社会福利制度的发展和完善,物质和精
人们生活质量的水平越来越高,导致劳动力成本的急剧上升,迫切需要从繁重的清洁工作中解脱出来,吸尘器的销售量大幅度在增加,在我国市场具有旺盛的生命力。由此诞生了一种家用服务型清洁机器人,它属于一种服务机器人,可以替代人们完成室内房间的打扫。扫地机器人要具有一定的智能性才能替代人类完成相应的任务。所以扫地机器人应拥有如下功能: 可以单独进行导航,检测到墙壁和房间里的障碍物,并避免它们; 可以穿过房间大多数的地方,检测出剩余电量并自动返回到充电状态。 同时,它需要紧凑的外形,稳定的操作和低噪音; 它包含了人机界面,让人们使用的时候的操作和控制更方便,使其人性化的特点更为突出,结合扫地机器人主要功能的基础上来讨论其控制系统的相关硬件设计,通过结合移动机器人的技术以及清洁技术,可以完成许多室内环境地面的全自动和半自动打扫,它的发展促进了家居机器人产业发展,同时带动了诸多相关科技技术的发展,在市场上的发展前景可以说是尤为广阔的了。
1.2 国内机器人产品的研究背景
近年来,人们家庭条件水平在逐年增高,对家用电器有了更高的条件和需求,如何能够更为便捷和智能的发展,解放人的双手,是各大电器厂商和学术界研究的重点。对于智能打扫机器人,国内部分理工科大学早就展开了对此方面的研究,并取得一系列研究成果,譬如机器导航、路径规划、电源管理、物联网等技术,为它的的研发和推广打下了坚实的基础。
上世纪九十年代,哈尔滨工业大学和香港中文大学联合共同研发拖地机器人,经过一段时间的研发,设计出一种全自动拖地机器人。在设计过程中,为扩大机器人的应用范围,采用全方位移动技术,即使是狭窄的区域,机器人依然可顺利完成清洁工作;为使机器人具备可扩展性,采用铰制结构;同时,该机器人还具备壁障功能,工作时若遇到障碍物,会自动避开执行其他区域的打扫工作,支持遥控和自动运行两种工作模式。
九十年代末期,浙江大学展开了清洁机器人的研究。历经两年时间,制造出我国首个具备智能吸尘机器人。相比之前设计的其他机器人,该机器人最大的进步在于具备了一定学习能力,在清洁过程中,机器人会采集清洁区域的信息,以做出更科学和合理的清洁规划。机器人配备了超声波传感器,能够精准测出物体之间的距离,在刚开始清洁房间的时候,会沿着墙壁撞一圈,算出它行走的面积,来规划清洁需要使用的时间;接着,随机和局部方法相结合,算出最佳的拖地路径;在房间打扫完毕后,便立即回到充电座并开始充电。现阶段,该机器人的改进目标主要是增添视觉和定位功能,使其在复杂环境工作时依然能够有效定位,计算出最佳打扫路径,从而更好的提高工作效率。
近年来,KV8扫地机器人以其极高的性价比获得众多消费者的青睐,同时,此款机器人也是首个从实验室正式进入市场售卖的扫地机器人。该机器人的应用范围极为广泛,家庭、办公场所都可应用,同时对于某些人工难以清理的地方也可以采用此款机器人。出于成本方面的考虑,该传感器仅配备了碰撞传感器,因此,其不具备自动规划清洁路径和自动充电的功能。
参考文献
[1].肖南峰. 服务机器人[M]. 北京:清华大学出版社,2013,5-35.
[2].蔡自兴. 机器人学[M]. 北京:清华大学出版社,2010,13-15.
[3].[朱高峰. 2011-2015年中国智能清洁机器人发展研究与前景预测报告[J]. 中商情报网,2011,38
[4]. 杨素行.模拟电子技术基础[M].北京: 清华大学出版社.2008年.
[5]. 初玲、刘国尧 数字电子技术[M].北京:机械工业出版社2011.8
[6]. 居吉乔.PROTEL99SE实用教程[M].北京:化学工业出版社 2010.6
[7]. 门宏 图解电子技术快速入门[M].北京:机械工业出版社2011.8
[8]. 邓亚平.微型计算机接口技术[M].北京:清华大学出版社.2007年.
[9]. 赵保经.中国集成电路大全[M].北京:国防工业出版社.2004年.
[10]. 童诗白.现代电子学及应用[M].南京:东南大学出版社.2008年.
[11]. 梁子旭.防盗报警中心通信系统设计[J].龙岩师专学报.2002.4
[12]. 松井邦彦.传感器应用技巧141例[M].北京:科学出版社.2006
[13].陈永甫.红外探测与控制电路[M].北京:人民邮电出版社.2004
[14].付家才.单片机控制工程实践技术[M].北京:化学工业出版社.



