





基于TCP/IP通信协议侧向叉车线上远程操控交互与传输系统设计
摘 要:本设计采用嵌入式控制器、视觉传感设备和远程操控站等模块构建。在侧向叉车上安装嵌入式控制系统,用于与上位机通信,控制驱动电路及执行机构。利用工业摄像头作为视觉传感设备,通过图像处理算法监测侧向叉车姿态和作业环境,反馈状态信息至上位机。在远程操控站通过上位机软件设置的人机交互界面,实现对侧向叉车的全面操控与监控。采用TCP/IP通信协议完成信息的交互与传输。说明书从控制系统、视觉传感和远程操作站三个方面,介绍了该远程操控系统的组成和整体方案,对硬件原理图和软件程序框图作了详细的描述,并在简单元器件功能的基础上,通过比较分析确定了各功能单元元器件的选用。经过软硬件联调,实现了系统控制精度和实时性的设计要求。
关键词:侧向叉车;线上远程操控;嵌入式控制系统;视觉传感; TCP/IP
Design of remote control system on the line of the side forklift
Abstract :This design uses Embedded controller, visual sensing equipment, remote control station and other modules to build. Install an embedded control system on the lateral forklift for communication with the upper computer, controlling the drive circuit and actuator. Utilizing industrial cameras as visual sensing devices, monitoring the posture and working environment of lateral forklifts through image processing algorithms, and providing feedback on status information to the upper computer. At the remote control station, the human-machine interaction interface set by the upper computer software enables comprehensive control and monitoring of the lateral forklift. Using TCP/IP communication protocol to complete information exchange and transmission. The manual introduces the composition and overall scheme of the remote control system from three aspects: control system, visual sensing, and remote operation station. It provides a detailed description of the hardware schematic diagram and software program diagram, and determines the selection of components for each functional unit through comparative analysis based on simple component functions. After software and hardware debugging, the design requirements for system control accuracy and real-time performance have been achieved.
Keywords:Side lift truck, Online remote control, Embedded control system, Visual sensing, TCP/IP
目 录
第1章 绪论 1
1.1课题研究的背景、目的及意义 1
1.1.1研究背景 1
1.1.2研究目的及意义 1
1.2相关术语及研究范围界定 1
1.2.1相关术语 1
1.2.2研究范围 5
1.3侧向叉车国内外发展现状 5
1.4课题主要研究方法及内容 6
第2章 侧向叉车线上远程操控系统概述 7
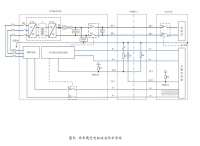
2.1 系统框架 7
2.2 操作原理 8
第3章 侧向叉车控制系统设计 9
3.1 侧向叉车控制原理解析 9
3.2 侧向叉车控制系统硬件设计 13
3.2.1 嵌入式控制器选型 13
3.2.2传感器接口设计 14
3.2.3执行机构接口设计 14
3.2.4通信接口设计 14
3.2.5电源设计 15
3.3 侧向叉车控制系统软件设计 17
3.3.1远程驾驶控制模型构建 17
3.3.2远程驾驶控制程序设计 19
第4章 视觉传感与状态监测系统设计 20
4.1 视觉传感系统设计 20
4.1.1摄像头选择 20
4.1.2摄像头配置 20
4.1.3图像预处理 21
4.1.4特征提取 21
4.1.5图像采集 22
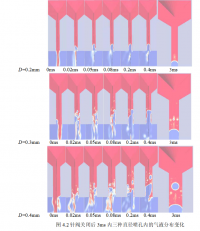
4.2 侧向叉车状态监测 22
4.3 状态信息融合与处理 23
第5章 远程操作站设计 24
5.1 操作站硬件配置 24
5.2 操作站软件设计 24
5.3 操作站人机交互 25
第6章 经济技术分析与总结及展望 27
6.1技术与经济分析 27
6.1.1技术分析 27
6.1.2经济分析 29
6.2 研究结论 30
6.3 存在问题 31
6.4 展望 31
参考文献 33
致 谢 35
第1章 绪论
1.1课题研究的背景、目的及意义
1.1.1研究背景
叉车作为新时代的产物,也是我国当代自动物流体系中不可缺少的重要搬运工具。在当代,叉车所具有的优势是无可比拟的,尤其在现代物流体系、工厂、港口搬运货物的过程中,叉车具有重要的应用意义,因此被广泛的应用。但在实际应用过程中,同样面临着人工操作叉车强度大、叉车操控繁琐等问题,有待解决。随着物流自动化的发展,侧向叉车作为物流中心的主要作业设备,其作业效率和安全性的提高受到广泛关注。传统的侧向叉车操作方式需要作业人员在车上直接操控,这限制了作业的灵活性和作业环境的适应性[1]。
近年来,随着自动化技术和网络通信技术的发展,侧向叉车的无人驾驶与远程操控成为可能。实现侧向叉车远程操控,可以在作业现场之外的控制室内完成侧向叉车的精确操控,大大提高作业效率和作业安全性,适应复杂的作业环境,减少人员在恶劣环境下的作业,同时也减轻了作业强度,更符合人性化作业的要求。
1.1.2研究目的及意义
本课题的研究目的就是设计一套侧向叉车线上远程操控系统,实现作业人员在监控室内对侧向叉车的启动、定位、移动、载重卸重等全过程的监控与精确控制。
该系统的研究具有重要的理论意义和实用价值:
(1)丰富了侧向叉车控制技术与远程操控技术的理论;
(2)为实现侧向叉车远程监控与智能化作业提供技术支持;
(3)可大幅度提高物流中心的作业效率与作业安全性;
(4)减轻作业环境对作业人员的要求,实现人性化作业;
(5)可为其他类似设备的远程操控与智能化提供参考。
1.2相关术语及研究范围界定
1.2.1相关术语
1.侧向叉车:侧向叉车的门架、起升机构和货叉位于叉车的中部,可以沿着横向导轨移动。货叉位于叉车的侧面,侧面还有一货物平台。当货叉沿着门架上升到大于货物平台高度时,门架沿着导轨缩回,降下货叉,货物便放在叉车的货物平台上。侧向叉车的门架和货叉在车体一侧。车体进入通道,货叉面向货架或货垛,装卸作业不必先转弯再作业。
它可以侧向运动,且机械结构主要由以下几个部分组成:
(1)底盘:提供装载空间和设备安装平台,一般由框架和工作台组成。
(2)起升机构:用于抓取和提升货物的机构,通常由叉子臂和叉尖组成。叉子臂可以升降和伸缩,叉尖用于钩取货物。
(3)驾驶室:用于驾驶员操作和控制的舱室。配有方向盘、控制杆、显示屏等操控设备和仪表。
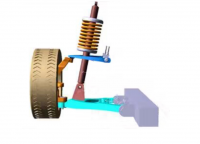
(4)悬挂系统:连接底盘与叉子系统的悬挂装置,可以保证叉子系统的升降和横向移动。
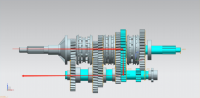
(5)驱动系统:为设备提供动力,主要由车桥、传动轴、减速机等组成。
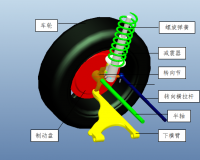
(6)转向系统:改变侧向叉车行进方向的系统,主要由转向架和轮胎或行走轮组成。
(7)电气系统:提供与控制侧向叉车各系统工作的电气设备,如电机、电池、控制器、仪表等。
(8)操作系统:接收驾驶员的操作指令,协调控制各系统工作的总成系统。包括控制器和各种操控设备。
侧向叉车的工作过程主要是驾驶员通过操控设备控制电气系统和操作系统,实现对驱动系统、转向系统、叉子系统的协调控制,完成装载、运输、卸载等物流作业过程。
参考文献
[1]姜海峰 . 基于小型货物搬运的智能叉车系统设计 [ J ] .南方农机,2019,50(24):22-23.
[2]张永根.发明问题解决理论与叉车整体设计的研究分析[J].新型工业化,2022,12(10):78-82+86.
[3]林芸.基于网络远程控制和仿真的智能制造机器人的路径自动规划[J].科技通报,2022,38(06):30-34.
[4]冯治广,董佳佳,王茂英.基于Android和5G网络的农业机器人远程控制系统[J].农机化研究,2023,45(01):234-238.
[5]李明.叉车远程监控系统的设计与实现[J].内燃机与配件,2022(04):227-229.
[6]陈佩珊,李思奇,周嘉欣,吴林旭.叉车的发展概述及前景展望[J].起重运输机械,2021(22):19-24.
[7]段军,高瞻,屠晓栋. 基于5G的远程驾驶操控系统的设计与实现[J]. 自动化技术与应用,2022,41(3):91-95.
[8]安远. 自动电动叉车设计与路径规划研究[D].西安:西安理工大学,2021.
[9]孙光泽. 基于机器视觉的电动叉车辅助驾驶分析研究[D].长春:长春工业大学,2021.
[10]邱来奇. 基于ROS的移动机器人设计及路径规划研究[D].阜新:辽宁工程技术大学,2020.
[11]吴胜军.叉车远程智能控制系统研究[J].信息记录材料,2020,21(07):194-195.
[12]赵浩甲,宋文学,李莎.电动智能叉车结构设计[J].制造业自动化,2019,41(11):81-83.
[13]刘元博. NAO机器人远程交互控制系统设计与实现[D].保定:河北大学,2018.
[14]刘同壮. 基于安卓系统自动装车机器人远程控制平台研究[D].青岛:山东科技大学,2018.
[15]孙茂钧. 基于4G无线网络某型牵引机远程状态监测系统的研发[D].沈阳:东北大学,2018.
[16]王亚娟. 仓储智能叉车的定位与补偿算法研究[D].广州:华南农业大学,2017.
[17]杨劲柯. 基于物联网的仓储搬运设备远程监控系统软件设计与实现[D].南京:东南大学,2017.
[18]王晶. 叉车智能控制系统设计研究[D].西安:长安大学,2016.
[19] 李志腾,李彦明,唐小涛,等.水稻穴直播机自主驾驶控制系统设计[J].农机化研究,2019,41(2):156-160.
[20]黎仕增,韦锦,刘港,等.防汽车油门误踩制动控制系统设计[J].汽车技术,2018,15(9):37-39.
[21]翁寅生,邬迪,鲁飞飞,等.煤矿井下钻机远程控制系统 设计[J].煤田地质与勘探,2019,47(2):24-30.
[22]Chen Shyh Wei, Lai Yu Chun, Tsai Ching Tsorng, Liu Chia Hui,Tu Jih Fu. Development of Intelligent Drone Remote Control System Based on Internet of Things[J]. Sensors and Materials,2022,34(7).
[23]Gentex Corporation; Patent Application Titled "Vehicle-Based Remote Control System And Method" Published Online (USPTO 20200168224)[J]. Journal of Transportation,2020.
[24]Xuesong Chen, Rongguo Hou, Haochen Wang, Peng Yang. Design of Intelligent Remote Control System for Bottle-Making Robot[J]. IOP Conference Series: Materials Science and Engineering,2018,452(4).
[25]朱荣熙. 汽车起重机远程操控系统人机交互设计[D].徐州:中国矿业大学,2020.
[26]汤珍. 内燃叉车的设计要点及技术发展趋势[J]. 河南科技,2013(5):87,100.



