




基于单片机的四足蜘蛛机器人设计
摘要:四足蜘蛛机器人的设计是先通过对四足蜘蛛机器人进行总体设计,再利用单片机作为四足蜘蛛机器人的主控中心,加上相应的无线遥控传感部分以及关节控制部分的软硬件设计,使四足蜘蛛机器人能够达到四个方向可以自由活动的目的,并且可以通过手机app控制来做出相应反应。
关键词:单片机;无线遥控;关节控制;四足蜘蛛;机器人设计
Quadruped Spider Robot Design
Abstract:The design of the quadruped spider robot is based on the overall design of the quadruped spider robot and the use of the single chip computer as the master control center of the quadruped spider robot, coupled with the corresponding wireless remote sensing part and the software and hardware design of the joint control part, enables the quadruped spider robot to achieve the purpose of free movement in four directions, and can respond through mobile app control.
Keywords:MCU, wireless remote control, joint control, quadruped spider, robot design
目录
第一章 绪论 4
1.1 四足蜘蛛机器人的设计背景及意义 4
1.1.1 四足蜘蛛机器人的设计背景 4
1.1.2 四足蜘蛛机器人的设计意义 5
1.2 四足机器人的国内外研究现状 5
1.2.1 四足机器人的早期探索时期 5
1.2.2 四足机器人的现代自主创新研究时期:国外研究现状 6
1.2.3 四足机器人的现代自主创新研究时期:国内研究现状 7
1.3 四足蜘蛛机器人的技术特点 8
1.4 课题研究的内容 9
第二章 四足蜘蛛机器人的总体设计 9
2.1 四足蜘蛛机器人的整体方案设计思路 9
2.2 四足蜘蛛机器人的腿部设计方案 9
2.3 四足蜘蛛机器人的外壳材料设计方案 12
第三章 四足蜘蛛机器人的硬件设计 13
3.1 四足蜘蛛机器人的硬件设计思路 13
3.2 四足蜘蛛机器人的单片机选择方案 13
3.3 四足蜘蛛机器人的无线遥控传感技术选择方案 16
第四章 四足蜘蛛机器人的电路设计 18
4.1 四足蜘蛛机器人的电路设计思路 18
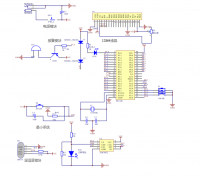
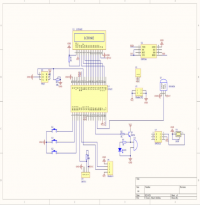
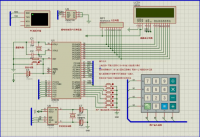
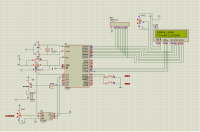
4.2 四足蜘蛛机器人的主控制系统电路模块设计 18
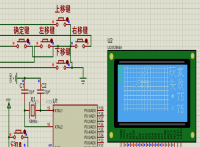
4.3 四足蜘蛛机器人的无线遥控传感系统电路模块设计 19
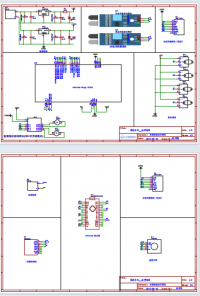
4.4 四足蜘蛛机器人的稳压电源系统电路模块设计 19
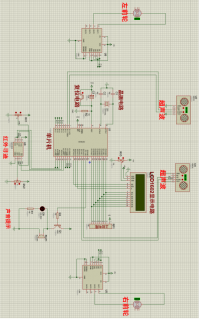
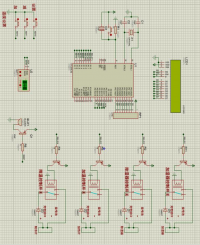
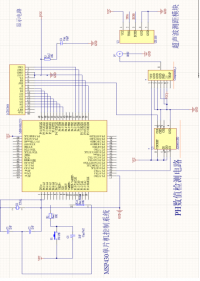
4.5 四足蜘蛛机器人的关节运动系统电路模块设计 21
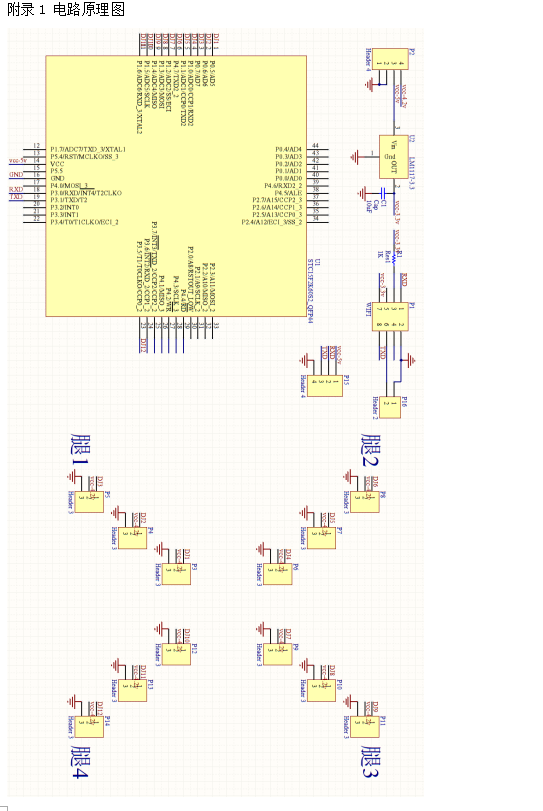
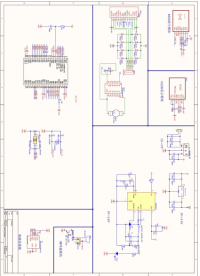
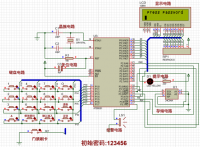
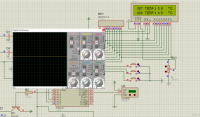
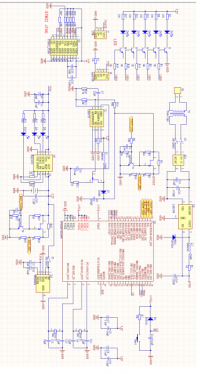
4.6 四足蜘蛛机器人的总电路原理图设计 21
第五章 四足蜘蛛机器人的程序控制设计 21
5.1 四足蜘蛛机器人的程序控制设计思路 21
5.2 四足蜘蛛机器人的头文件函数程序设计 22
5.3 四足蜘蛛机器人的程序函数定义设计 22
5.4 四足蜘蛛机器人的关节运动控制部分的程序设计 22
5.5 四足蜘蛛机器人的无线Wi-Fi模块控制部分的程序设计 23
5.6 四足蜘蛛机器人的主控制系统部分的程序设计 23
5.7 四足蜘蛛机器人的总程序设计 23
第六章 总结与展望 23
小结与致谢 24
参考文献 26
第一章 绪论
1.1 四足蜘蛛机器人的设计背景及意义
1.1.1 四足蜘蛛机器人的设计背景
随着高科技时代的来临,机器人不断地被应用于我们的生活当中,因为机器人不但可以帮助我们人类完成一些日常的生活小事,比如像智能扫地机器人这种服务型机器人,也可以帮助人类完成某些危险工作,比如对于一些高空作业的检测,管道的通风检测等等,这不仅可以提高工作效率而且还可以保障人类的自身安全。
而目前,工业机器人国际标准大会曾经在1990年将机器人分为顺序型、沿轨道作业型、远距离作业型和适应型或者称为智能型这四个机器人大类,其中顺序型的机器人大多是机械手类型,而沿轨道作业型的机器人多是受控型机器人,远距离作业型的机器人大多是可以通过编程来进行遥控的机器人且多用于应用领域,适应型的机器人大多则是有着感知、适应以及学习能力的机器人。
步行机器人是适应型机器人的一种,而步行机器人又可分为两足、四足、六足等,且步行机器人出现的关键原因是因为在自然界和我们人类所生活的世界中有一些是我们所无法抵达或者是存在严重危及人类生命的特殊场合。例如在各行星的星球表面、在自然灾害发生的情况时、灾难发生的矿井下或者是防灾救援的工作时等等,而学者们在对这些危险环境进行了不断地探索和研究之后发现,地形的不规则性以及道路的崎岖不平性是这些环境共有的一大特点。因为在各种生物所生活的自然界中这些地形是传统轮式机器人或履带式机器人所无法到达或无法安全行进的高危地形,但自然界中的哺乳动物却可以在这些地形安然无恙的行走,这也能够充分显示出四足移动方式的一种优势。通过以往的研究观察发现轮式机器人和履带式机器人在平坦的地形上行驶时,都具有运行速度迅速以及运行时平稳的特点,且它们自身的结构和控制也比较简单,但在这种地形不规则或者崎岖不平的道路环境下它们的应用就受到了极大的限制,主要是因为在这种崎岖地形行驶的情况下它们的能耗将会大幅度增长,且对于在松软地面行驶的情况下轮式机器人的车轮作用也将严重损失,移动速率会大幅度降低。虽然研究履带式机器人的初衷是为了改善车轮对松软地面的适应能力,但履带式机器人在崎岖不平的地面上运动的机动性却不能令人满意,且履带式机器人在崎岖地形上行驶时的机身晃动严重。通过与轮式机器人和履带式机器人两种机器人的对比之下了解到,步行机器人的运动轨迹多为离散型的足印式运动方式,所以在运动过程中,只需要使离散的点接触到地面,这样对环境的毁坏程度也相对较小,可以通过选择地面上最佳的支撑点来进行运动,所以步行机器人对崎岖地形的适应性就比轮式机器人和履带式机器人更好。这些由哺乳动物所启发、研究出来的步行机器人对于崎岖不平的路面上就有了极大的优势。因此,在这种背景下学者们对步行机器人的研究有了更深一步的探索研究并且取得了许多丰硕成果。
1.1.2 四足蜘蛛机器人的设计意义
四足蜘蛛机器人可以通过特定传感器来做出反应,例如行走、爬行。我们可以在四足蜘蛛机器人上安装特定的传感器来完成对危险场所的勘察和检测,这样不但可以降低工作难度,还可以节省开支。
智能机器人的发展已经必不可少,但也不能仅限于解决生活上的问题,更应该就以后人类所生存的方面去解决一些危害人类生命安全的场合下的问题,例如对未知地点的勘察、高温高压下的检测、狭小地方的探索、灾难发生的矿井下等特殊场合都可以通过四足蜘蛛机器人安装特定仪器来完成,对人类的生命安全问题具有重大的研究发展意义。
1.2 四足机器人的国内外研究现状
在现如今飞速发展的高科技时代中,机器人可以说是国内外的一大科技研究热点,因此国内外也紧跟时代的步伐对机器人、尤其是对于步行机器人进行了深入的探索和研究。
四足机器人的发展时期又可以分为早期的探索时期和现代的自主创新研究时期。



