





















基于PLC的汽车防撞系统的设计
摘 要
本文以西门子PLC(S7- 200)为控制核心,结合模拟量输入模块、车速传感器、测距传感器等,设计汽车智能防撞控制系统。这套系统软硬件设计合理、抗干扰能力强、实时性良好,经过系统扩展和升级,可以用于倒车雷达、建筑施工工地以及一些工业现场,例如:测量液位、井深、管道长度等场合。
在高速公路上行驶的车辆速度快,在能见度很低的天气或驾驶疲劳的情况下,将影响驾驶员对目标的识别。采用汽车雷达检测前方障碍物的相对距离和速度,提前预警,可有效降低交通事故的发生。因此,一种响应快、可靠性高且较为经济的汽车智能防撞系统十分必要,而该系统的核心在于快速、准确地测量出汽车与障碍物间的距离及相对速度,为驾驶人员提供准确的判断信息,避免汽车追尾碰撞。
本文介绍的汽车智能防撞系统是关于汽车安全系统的主动安全方面,利用安装在汽车前保险杠上的雷达传感器测量自车与前方目标物间的距离和相对速度,再由主控单元对采集的车辆实时信息进行分析并判断当前的行车安全状态,采取相应的报警方式并采取制动措施或使驾驶员提前采取相应的措施,提高驾驶安全性。
关键词:西门子PLC,车速传感器,汽车智能防撞系统,安全性
Abstract
Based on Siemens PLC (S7-200) as the control core, and combined with analog input module, vehicle speed sensor, distance measuring sensor, We design the Vehicle intelligent collision avoidance control system. The system hardware and software design is reasonable, strong interference ability; good real-time, reversing radar, the construction site, as well as some industrial field can be used for system expansion and upgrade, for example: measuring the level, depth, and length of the pipe, and other occasions.
The speed of the vehicle driving on the highway fast, in the low visibility weather or driving fatigue condition, will affect the recognition of target driver. The automotive radar detection distance and relative velocity, the obstacle in front advance warning, can effectively reduce the occurrence of traffic accidents. Therefore, a kind of intelligent automobile collision avoidance system fast response, high reliability and more economy is necessary, and the core of the system is measured between vehicle and obstacle distance and relative speed quickly and accurately, provide the accurate information for the driver, avoid rear end collision.
Automobile intelligent anti-collision system introduced in this paper is the active safety of automobile safety system, installed in the use of automobile front range radar sensor on the bumper car in front of the object and self and the relative velocity, then the main control unit on the collection of vehicle real-time information to analyze and judge the current safety status, take alarm mode corresponding and take braking measures or the driver to take corresponding measures in advance, improve driving safety.
keywords: Siemens PLC, speed sensor, intelligent vehicle collision avoidance system, safety
一、选题简介、意义
现在越来越多的汽车安全性低,所以我们的生活得到保证,越来越多的汽车防护设备出世,汽车防撞装置是一种新的技术,用于汽车防撞装置监测到前方车辆的距离,也可以使汽车慢下来,以确保运行安全性.
防撞器的显示报警系统能及时显示本车的车速、前方最具威胁车辆或物体的距离。当接到中央处理系统的指令时,能以声音的方式提醒驾驶人员前方有危险信息,需谨慎驾驶,显示报警功能,大大提高了人车安全。
二、课题综述(课题研究,主要研究的内容,要解决的问题,预期目标,研究步骤、方法及措施等)
本文以西门子PLC(S7- 200)为控制核心,结合模拟量输入模块、车速传感器、测距传感器等,设计汽车智能防撞控制系统。这套系统软硬件设计合理、抗干扰能力强、实时性良好,经过系统扩展和升级,可以用于倒车雷达、建筑施工工地以及一些工业现场,例如:测量液位、井深、管道长度等场合。
本文介绍的汽车智能防撞系统是关于汽车安全系统的主动安全方面,利用安装在汽车前保险杠上的雷达传感器测量自车与前方目标物间的距离和相对速度,再由主控单元对采集的车辆实时信息进行分析并判断当前的行车安全状态,采取相应的报警方式并采取制动措施或使驾驶员提前采取相应的措施,提高驾驶安全性。
三、设计(论文)体系、结构(大纲)
设计的框架大体上包含以下几个方面的内容:
1.汽车自动防撞器研发现状
2.涉及的控制电路设计
3.PLC接线、装配、电气原理图的制作
4.其它各方面的小结与致谢
5.参考的文献
资料的准备
目录
摘 要 2
Abstract 3
第一章 绪论 4
1.1 引言 4
1.2 研究的意义 6
1.3 汽车自动防撞器研发现状 7
第二章 设计方案介绍 8
2.1 设计要求: 8
2.2 系统方案介绍 8
2.3 系统方案确定 8
第三章 控制系统硬件设计 11
3.1 电气系统主要元件介绍 11
3.1.1 PLC简介及选型 11
3.1.2 测距传感器 16
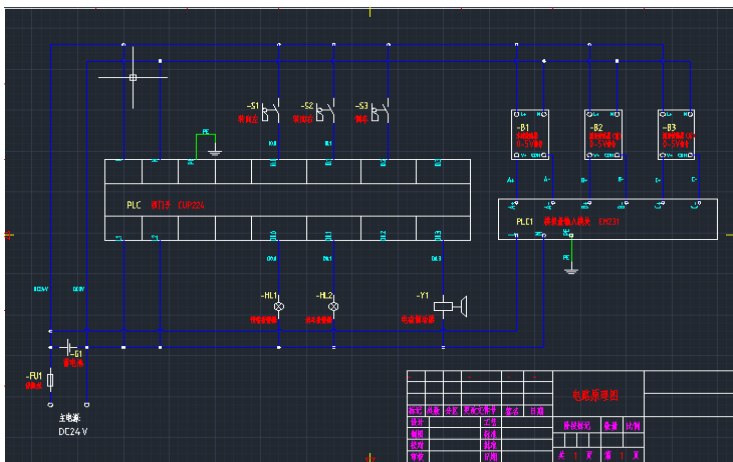
3.2 电气原理图 19
第四章 控制系统软件设计 20
4.1 S7-200编程软件 20
4.2 PLC程序设计: 20
参考文献(References) 24
致谢 25
毕业设计附录 26
电器原理图 26
PLC接线图 27
汽车防撞系统安装图 28
参考文献(References)
[1] 向晓汉 S7-300/400PLC基础与案例精选 北京:机械工业出版社 2010
[2] 向晓汉 PLC控制技术与应用 北京:清华大学出版社 2010
[3] 向晓汉 电气控制与PLC技术 北京:人民邮电出版社 2009
[4]崔坚 西门子工业网络通信指南 北京:机械工业出版社 2004
[5]廖常初 S7-300/400 PLC应用技术 北京:机械工业出版社 2004
[6]倪森寿 机械技术基础 人民邮电出版社 2009
[7]倪森寿 机械制造工艺与装备 人民邮电出版设 2009




